
老人跌倒姿态检测研究
2019-03-16 06:41蔡长青
长春工程学院学报(自然科学版) 2019年4期
蔡长青,王 鹏
(长春工程学院,长春 130012)
0 引言
自21世纪以来,中国人口老龄化问题加剧[1]。加快老龄产业发展,缓解社会压力,已成为中国有待解决的重要问题。根据调查,只有少数老年人愿意在养老机构里被照顾,因此中国的养老市场巨大[2]。
目前,世界上已有许多国家已经进入人口老龄化时代。每年约30%~40%的老年人跌倒一次或多次,并且跌倒的可能性随着年龄的增长而增加[3]。大约1/3的65岁以上的老人每年跌倒一次或多次,而80岁以上老人的跌倒发生率每年高达50%。老年人跌倒经常导致身体创伤和心理阴影,而且是威胁老年人生命和健康的重要因素。中国老年人的直接医疗费用超过50亿元人民币。老年人可以适应节奏缓慢的单项运动,但如果同时或急于进行两项独立的运动时,可能会因为注意力分散,使得协调不力,从而失去平衡[4]。老年人的骨骼肌系统机能下降,导致肌肉和关节运动减少,再加上骨质疏松症,就很容易引发跌倒。朱连杰等[5]人总结了基于可穿戴设备的跌倒检测方法。李欣欣等[6]人进行了基于单片机的跌倒检测报警系统设计。但这些研究都缺少跌倒事件与日常其他事件的对比分析。本文对跌倒事件和其他日常行为事件进行了对比分析,以弥补这一缺失。
1 老人跌倒检测报警系统总体方案设计
智能养老院老年人跌倒检测报警系统由3部分组成:远程监控客户端、通信层和养老院设备。老年人跌倒检测警报系统的整体框图如图1所示。

图1 老人跌倒检测系统整体框图
远程监控客户端:通过监控智能养老院中的主机客户端,可以看到不同活动情况下老年人的加速度值、倾角值、加速度、倾角波形、跌倒报警提示等。
通信层:在手环检测到的跌倒信息数据由CC2530微处理器调整后,该数据通过Zigbee无线传输模块传输到智能终端STM32主控制器上的Zigbee无线接收模块。在智能终端主控制器处理完数据后,数据通过房间的局域网网线传输到监控中心的计算机上。电脑通过上位机软件显示跌倒报警信息提示。
养老院中的设备:可穿戴设备是老人跌倒检测手环。通过Zigbee技术将检测到的数据发送到STM32控制处理终端。多阈值判断跌倒算法用于确定老年人是否跌倒,跌倒后发送信号,将跌倒提示显示到主机界面。通过上位机界面,可以看到老年人的加速度值和倾斜度值。
2 老人跌倒姿态检测算法
2.1 数据采集机制
研究发现“低于15 Hz的能量集中了99%的人体加速度信号”,换句话说,人体检测到的加速度频率通常低于20 Hz。根据奈奎斯特采样定律,通过使用比采样信号的最高频率高两倍的采样信号频率,可以不失真地表示原始信号。因此,我使用了频率为50 Hz的采样信号和20 ms的定时器中断定时来触发传感器数据的单次转换。在完成AD转换之后,将数据直接传送到DMA,从而节省CPU资源,并且可以直接确定用于操作存储单元的跌倒检测算法。
2.2 信号预处理
由于加速度计输出的信号通常为小电压信号,并且容易受到外界的影响,因此有必要对输出信号进行抗干扰处理。通常,抗干扰预处理分为软件过滤和硬件过滤。硬件过滤通常是为了调整系统电路板的布线和设计组件的布局。软件过滤是一种使用算法和程序过滤干扰信号并消除信号杂波的方法。对于可穿戴设备,向手环添加硬件过滤器通常很麻烦且笨重,这不利于安装。因此,此处选择软件过滤。20 Hz低通滤波器是使用Matlab设计的。
Matlab计算的低通滤波器的幅频响应如图2所示。
Matlab计算得到的巴特沃斯系数可用于获得巴特沃斯滤波器的系统函数见式(1):
(1)
通过使用此系统功能,可以在程序中实现倾斜度的巴特沃斯低通滤波。图3和图4是应用巴特沃斯低通滤波器对倾斜度影响的滤波前后对比,可以看出软件滤波效果明显。

图2 巴特沃思低通滤波器幅度频率响应图

图3 倾角值原始数据
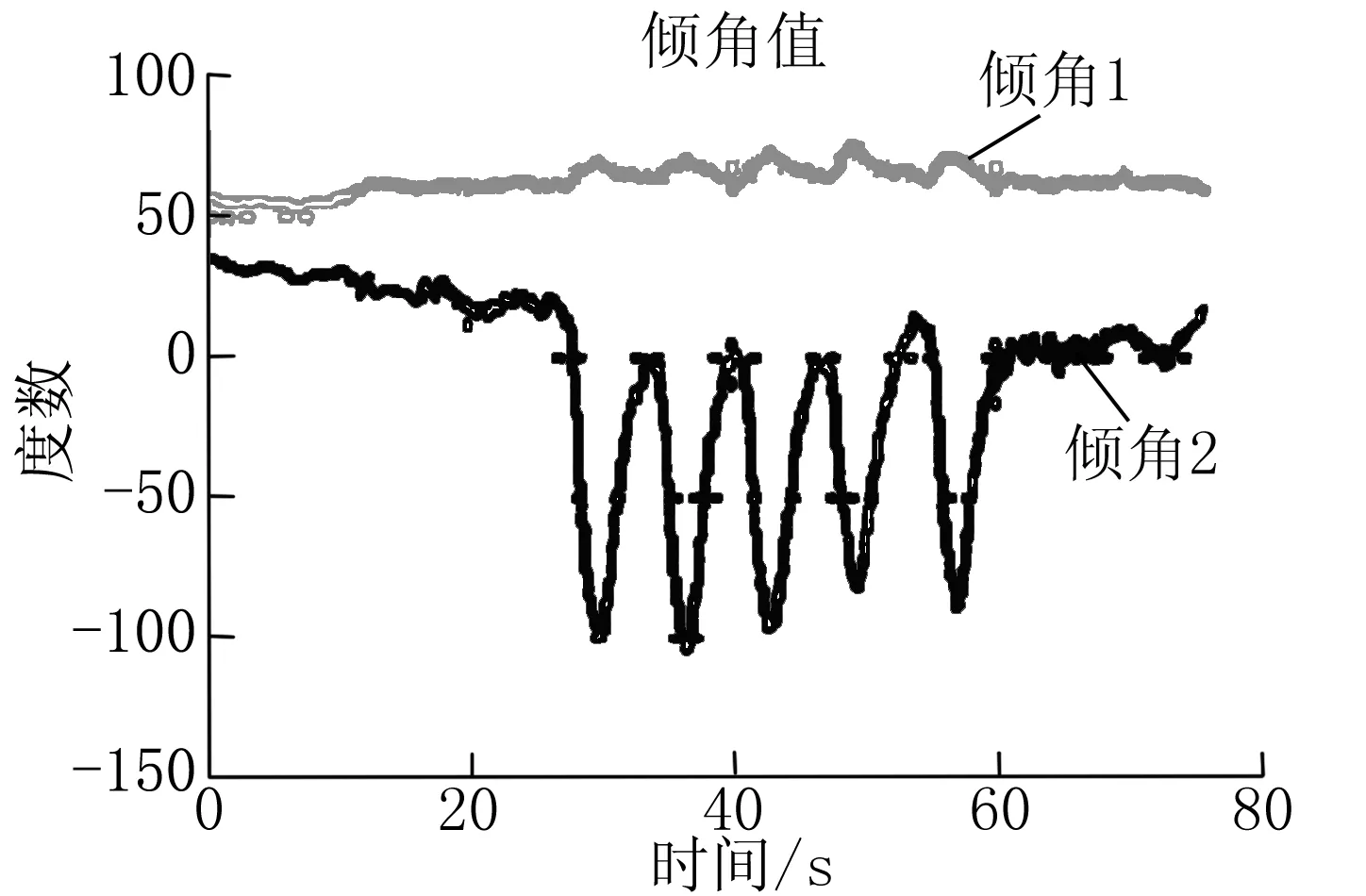
图4 倾角滤波之后数据
2.3 多阈值判断跌倒算法
由于跌倒是随机发生的,因此无法预测跌倒所面向的方向。对3个方向的加速度值进行单一分析并不完美。如果使用区域加速度强度SMA和加速度强度矢量SMV来处理3个方向的加速度,则加速度的空间分量将被忽略并且更具适应性。为了准确地将跌倒事件与日常行为事件(例如跑步、跳跃、步行、上下楼梯等)区分开来,我们使用六轴传感器MPU6050检测人体的加速度和倾角值在3个方向上数据。
分析六轴传感器在3个方向上收集的加速度数据,我们采用了两个特征值区域加速度强度SMA和加速度强度矢量SMV,定义式如下:
(2)
式中acc_X(i)、acc_Y(i)、acc_Z(i)分别表示在第i次收集的六轴加速度传感器在X,Y和Z方向上的加速度值,单位是g(1 g=9.8 N)。
SMA和SMV的阈值数据在3个方向上收集的六轴传感器的加速度值,关系如图5所示。
因为六轴传感器每秒在3个方向上收集加速度数据50次,所以等效于每秒在X,Y和Z方向上收集50组加速度数据。然后,横坐标表示为实验收集点的数量。显示了大约200 s收集的实验数据。

图5 加速度传感器值与实验采集点数的关系
此外,使用式(2)计算SMA和SMV的值并绘制图表。如图6所示,大约有12 000个数据点(240 s数据)。图6中显示的数据由一系列运动组成,例如静止、小跑运动、行走、奔跑、上下楼梯、跌倒和跳跃。从SMA值图中可以看出,大幅度运动,跌倒和跳跃期间的SMA值非常大,尤其是在跌倒期间的SMA值最大。因此,可以设置一定的阈值来区分大跑、跌倒、跳跃和其他日常事件。并且在SMV值图像中,还可以看到跑步和跳跃时SMV值较大,并且跌倒与其他日常活动的SMV值比较小,还可以设置一定的阈值来区分跑步和跳跃以及其他日常活动,例如跌倒和行走。
当人意外跌倒时,人体躯干的倾斜角度会急剧变化。通过六轴传感器收集人的倾斜角值是判断人是否跌倒的辅助条件。通过作图分析表明,日常行为的倾斜范围小于30°。图7是倾斜角度的数量与实验收集点的数量之间的关系。倾斜角1表示左右倾斜的角度,倾斜角2表示前后倾斜的角度。从图中可以清楚地看到,跌倒期间的倾角值很大,可以设置一定的阈值以将跌倒与其他日常行为事件区分开。

图6 SMA和SMV与实验采集点数的关系

图7 倾角度数与实验采集点数的关系
综上所述,本文的多阈值判断跌倒检测算法的第一步是确定区域加速度强度SMA。当SMA的值大于阈值TH1时,确定发生了可疑的跌倒事件(在剧烈运动和跌倒之间时的SMA值同样大)。在第二步中,检查加速度强度矢量SMV。当SMV的值小于阈值TH2时,怀疑会发生第二次跌倒(因为在跌倒过程中SMV的值较小,并且其他SMV值较大,因此可以排除剧烈运动,例如跑步和跳跃)。第三步是判断人体的倾斜度。当倾斜阈值大于TH3时(某些动作,例如快速坐着和站着,可以排除在外),如果满足条件,则确定老人跌倒了。多阈值判断跌倒算法流程图如图8所示。

图8 多阈值判断跌倒算法流程图
3 老人跌倒检测报警系统硬件设计
六轴传感器MPU6050嵌入手环中,以检测老年人在3个方向上的加速度和倾角值,并将数据传输到CC2530微处理器。通过CC2530微处理器调整数据后,使用Zigbee无线通信技术将数据传输到养老院智能终端STM32,然后使用多阈值判断跌倒算法来确定老人是否摔倒了。跌倒报警手环的整体硬件设计框图如图9所示。

图9 跌倒报警器硬件总体设计框图
跌倒报警设备主要由六轴传感器MPU6050、稳压电源模块、CC2530微处理器和Zigbee无线收发器模块组成。数据通过Zigbee无线收发器模块传输到智能终端STM32进行处理。
六轴传感器MPU6050模块的电路原理图如图10所示。

图10 MPU6050六轴传感器模块原理图
4 老人跌倒检测报警系统软件设计
用于检测和判断老年人跌倒的软件的一部分是智能终端STM32的嵌入式处理器。该程序是在Keil uVision4软件环境中编写的,它使用STM32F103ZET6作为智能控制终端处理芯片,实现对六轴传感器采集的加速度值数据和倾角值数据的处理。STM32定时器控制多通道A/D转换以及DMA数据的传输和I/O端口的控制,数据通过串行端口在STM32和CC2530之间传输,并使用多个阈值确定跌倒检测算法,跌倒检测手环软件流程图和智能终端检测跌倒设备软件流程图如图11~12所示。

图11 跌倒检测手环软件流程图

图12 智能终端检测跌倒设备软件流程图
5 实验测试与结果分析
该实验的数据分析,典型跌倒事件的分析以及其他日常行为事件的分析,最后邀请几名学生验证跌倒实验,包括跌倒以及一些日常行为事件,例如跳跃、步行、弯腰等。根据本文的多阈值判断跌倒算法,可以实时检测跌倒事件。
通过四轴上位机软件可以看到人3个方向的加速度值、倾角值如图13所示。

图13 四轴上位机显示加速度值和倾角值
这时,我们使用多个阈值来确定跌倒算法以进一步判断,并处理10个向前和向后跌倒和5个跳跃的数据,获得区域加速度强度SMA和加速度值强度矢量SMV以及倾角值。经过滤波处理后,获得左右倾斜角1和前后角2。如图14所示,SMV、SMA、倾斜角1和倾斜角2的变化分别对应于向前、向后和向左方向的10个跌落事件和5个跳跃事件。

图14 日常生活事件与跌倒时各参量变化
从图15可以看出,在进行跌倒实验时,通过多阈值判断跌倒算法计算出的区域加速度强度SMA,加速度强度矢量SMV和倾角值可以清晰地区分跌倒事件,尤其是通过将SMA阈值设置为-1g,可以区分SMA和倾斜角2的值,分别向前,向后和向右倾斜;因为倾斜角2的值(向前和向后倾斜的角度)是向左的,所以跌倒时的情况非常强烈,可以通过将倾斜阈值设置为120°来区分。从图14可以看出,无论向哪个方向跌倒,SMV的值都会相对于其他状态发生显着变化,并且跳跃的SMV值将达到最大值,并且可以将SMV的阈值设置为>20以区分跳动状态。SMV阈值设置为<3,以区分日常活动的其他状态。

图15 跌倒和跳跃过程中参数的变化
在分析其他日常行为事件时,几名学生戴上跌倒检测装置,然后进行静止,弯腰3次,坐下3次,站起来3次,步行,跑步,上下楼梯和3次跌倒实验,Matlab软件绘制由这些动作生成的数据图像,如图14所示。
从图14的分析可以看出,从SMA值图可以看出,图像在弯腰,跌倒,坐下和起立时都具有较大的SMA值,尤其是在跌倒时SMA值最大,因此可以设置一定阈值,区分出弯腰、跌倒和坐下、起立与其他日常事件。在SMV值的图像中可以看到在跑步、上下楼梯和跌倒时SMV值较大,同样可以设置一定阈值区分出跑步、上下楼梯和跌倒与其他日常事件。再通过倾角值辅助判断出跌倒与其他日常行为事件。
6 结语
通过使用跌倒检测手环结合多个阈值来判断跌倒算法和Zigbee技术对老人本身是否发生跌倒情况进行检测和报警,能有效防止老人在养老院中发生跌倒时无人发现的情况发生,让老人时刻处于安全的监控状态。在实验中,该系统相对稳定,具有良好的使用效果,具有实际应用价值。
但在多阈值判断跌倒算法中,阈值的数量选取应该更多;阈值的选取应该可以根据不同的人群自行学习设置,做到真正的人工智能。
猜你喜欢
当代水产(2022年6期)2022-06-29
中华养生保健(2022年10期)2022-05-23
四川工商学院学术新视野(2021年2期)2021-11-02
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
文理导航·教育研究与实践(2016年12期)2017-01-11
