基于GNSS测高技术的单站潮位改正方法研究
2019-03-08 09:56:20代水
水利水电快报 2019年2期
, ,代水,
(长江水利委员会水文局 长江三峡水文水资源勘测局,湖北 宜昌 443000)
潮位改正的实质是在瞬时测深值中扣除水面时变影响,将测得的瞬时深度转化为一定基准上与时间无关的“稳态”深度场的数据处理过程[1]。在高精度水深测量中,潮位值由一个或多个验潮站上的潮位观测序列提供。在水深测量工作中,反演出多种潮位改正方法,如单站潮位改正、多站潮位改正,其中,多站潮位改正方法有线性内插法、分带分区法、时差法、最小二乘法[2]等。
1 单站潮位改正的局限性
当测区范围不大于5 km时,在某一验潮站的有效控制范围内,测区内水深数据可用该站的潮位数据进行潮位改正,在单站改正前要做的重要工作之一是确定验潮站的有效控制范围。验潮站有效范围[3]是指在两个验潮站断面上,一个验潮站按给定潮位改正精度的作用距离,这取决于两点间的最大潮差,计算公式为
(1)
式中,δ为精度指标,根据测量精度要求取0.1 m或0.2 m;DAB为两站间距离,根据验潮站位置由大地测量反算公式计算;Δζmax为两站间最大潮差,随着测区与验潮站间的距离增大,潮位改正的精度逐渐减小。假设验潮站B恰好位于验潮站A有效范围的边缘,即DAX=DAB,则Δζmax=δ,得出在验潮站有效控制范围的边缘地带仅潮位改正误差就达到水深测量限差δ,这样对单波束水深测量的精度影响较大。
通过以上分析可以看出,测区与验潮站间的距离增大,用单站潮汐改正严重影响水深测量精度。为了获得高精度的水深测量数据,需增加验潮站的数量,进行双站、三站甚至多站潮汐改正。这种增加验潮站的方式不仅严重浪费人力、物力,且当测区远离海岸,无法增设验潮站时,会对海洋测量带来不便。因此,本文提出一种GNSS测高与单站潮位联合改正方法,较好地解决这一问题,有效地提高了水深测量精度,同时又节省了人力、物力。
2 基于GNSS测高的单站潮位改正
随着GNSS定位技术的发展,尤其是GNSS测高精度的提高,在海洋测绘中GNSS已不仅应用于平面定位。利用GNSS的载波相位差分技术进行高精度定位,获得测船GNSS天线相位中心的精确高程,GNSS RTK能达到厘米级高程精度。测船在走航式测深过程中,由于风浪及潮汐等因素引起测船吃水变化、涌浪效应及潮汐变化,使测船垂直分量产生动态变化,进而影响测深质量,见图1。

图1 GNSS测高中的几何关系
其中,H为GNSS接收机天线相位中心椭球高,可利用GNSS载波相位差分解算出;L为GNSS接收机天线相位中心到换能器的距离,为固定值;T为瞬时潮位;S为涌浪效应引起的测船升沉;C为换能器吃水;ζ为基准面偏差,即理论深度基准面至参考椭球面的距离;h为瞬时水深。则有
H=L+T+S+ζ-C
(2)
由式(2)可知:GNSS高程H的变化与潮位T的变化、涌浪效应参量S、换能器吃水C及基准面偏差ζ的变化有关。
在岸边验潮站观测潮位数据,同时在测量过程中获得测区内每一测点的瞬时GNSS测高数据。利用小波去噪法[4]等方法,对GNSS高程进行滤波处理,滤除涌浪数据S,得到测船任意时刻的GNSS高程近似曲线,见图2。
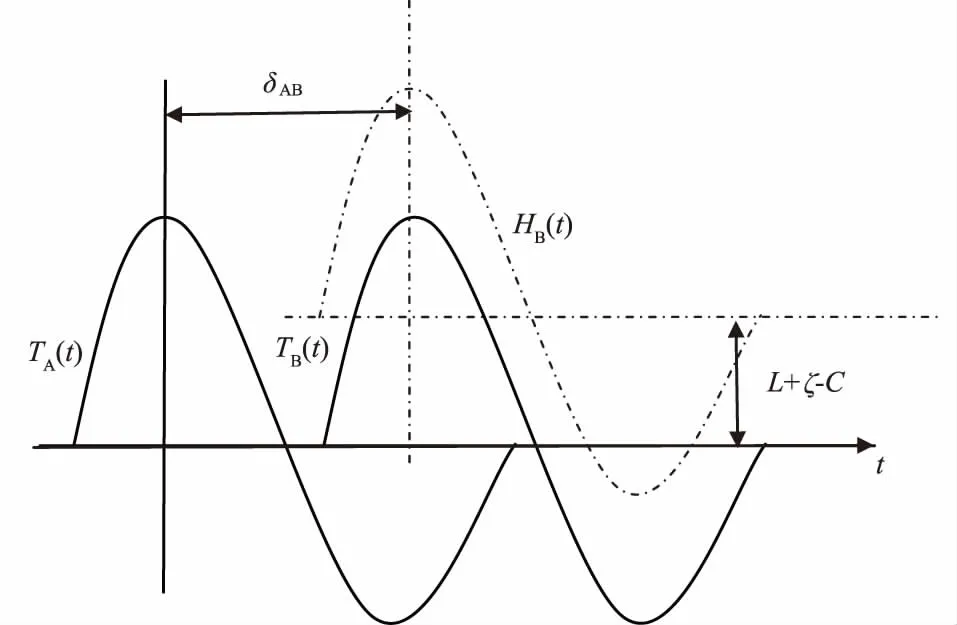
图2 GNSS高程和潮位曲线变化
图中,TA(t)为验潮站潮位曲线,TB(t)为测区潮位曲线,HB(t)为滤除涌浪后的GNSS高程近似曲线,δAB为测区和验潮站间的潮时差。换能器的吃水C包含两个部分:①静态吃水,在测量过程中会由于油耗等因素呈线性变化,变化量很小,在此处计算曲线拟合时不予考虑;②动态吃水,主要受船速的影响,按照规范,单波束水深测量作业时应使测船尽量保持匀速,因此可把动态吃水近似看为一个常量。由于1 d中的单波束测量作业范围较小,基准面偏差ζ可认为是一个常量,则有
HB(t)=TB(t)+L+ζ-C
(3)
测区潮汐曲线TB(t)可视为GNSS高程曲线HB(t)向下平移了L+ζ-C,而纵轴的平移量L+ζ-C对横轴上的δAB的计算没有影响。
根据时差法潮位改正理论[3],把验潮站潮位与GNSS高程视作信号,验潮站潮位序列为X1,X2,…,Xn,GNSS高程序列为Y1,Y2,…,Yn,τ为时间延时,通过相似函数
(4)
求得相似值序列Rxy(1),Rxy(2),…,Rxy(n),当相似值|R|最接近1时,两曲线最相似,此时的时间延时τ可认为是验潮站和测区的潮时差δAB,测区的潮位TB(t)=TA(t+δAB),即通过在验潮站的潮位加入潮时差因子,可推估出测区的潮位。因此用潮位TB(t)对水深测量数据进行潮位改正要比用验潮站潮位TA(t)精确。
3 实例计算
实验数据为黄海某海域实测数据,数据采集时间为2013年7月,其中GNSS测量采用的是当地CORS网站方式,用于定位数据和GNSS高程数据的获取,数据采集频率是10 Hz。测深系统使用的是单波束测深系统,验潮数据通过人工验潮获得。
首先利用小波去噪方法对GNSS测高数据进行滤波处理,滤除涌浪信息,效果见图3。
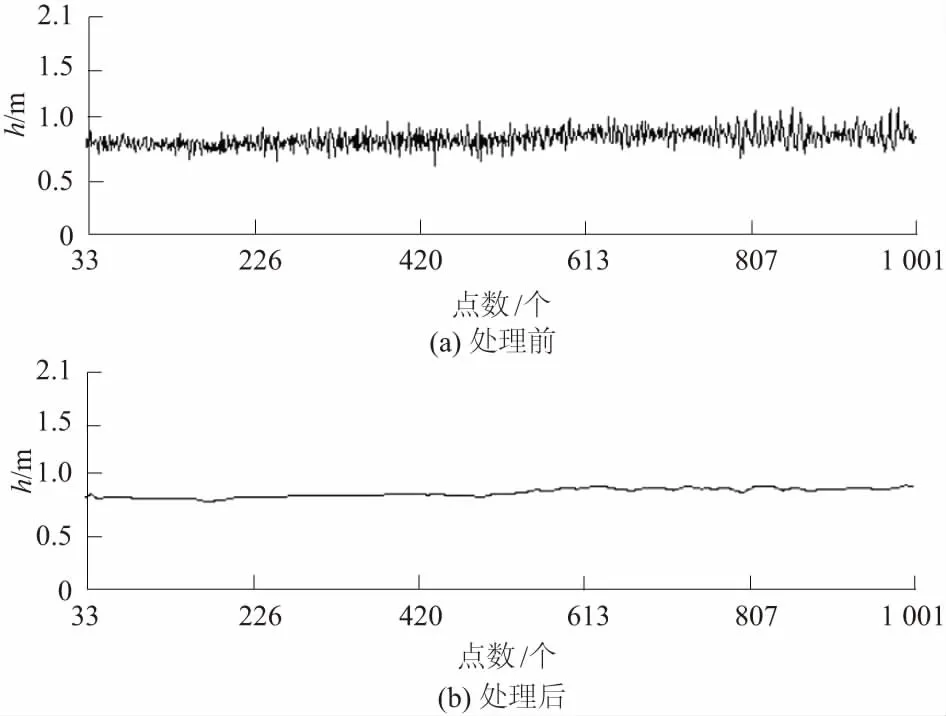
图3 小波去噪效果
GNSS高程曲线序列加常数对计算潮位曲线和GNSS高程曲线的相似度影响较小,可以通过计算潮位曲线和GNSS高程曲线的相似度来计算验潮站和测区的潮时差。该次试验人工验潮潮位数据采用10min间隔采集,为了提高计算潮时差的精度,对验潮站数据进行插值处理,间隔为1min,见图4。

图4 验潮站潮位曲线
为方便对比计算GNSS高程曲线和验潮站潮位曲线,将滤波后的GNSS高程曲线去除跳变值后,在整分处取10s的GNSS高程数据求平均后代表此刻的GNSS高程值。处理后效果见图5。

图5 测区GNSS高程
根据时差法潮位改正理论[3],验潮站潮位序列为X1,X2,…,Xn,GNSS高程序列为Y1,Y2,…,Yn,τ为时间延时,由于潮波传播方向未知,则τ取值为0,±1,±2,±3,…,±n-1,单位为min。通过相似函数公式(4),利用MATLAB求得相似值如表1所示,则测区与验潮站的潮时差为-7 min,推算出测区的潮位
TB(t)=TA(t+δAB)
(5)
改正后测区的潮位曲线TB(t)和验潮站潮位曲线TA(t)潮位比较见图6。
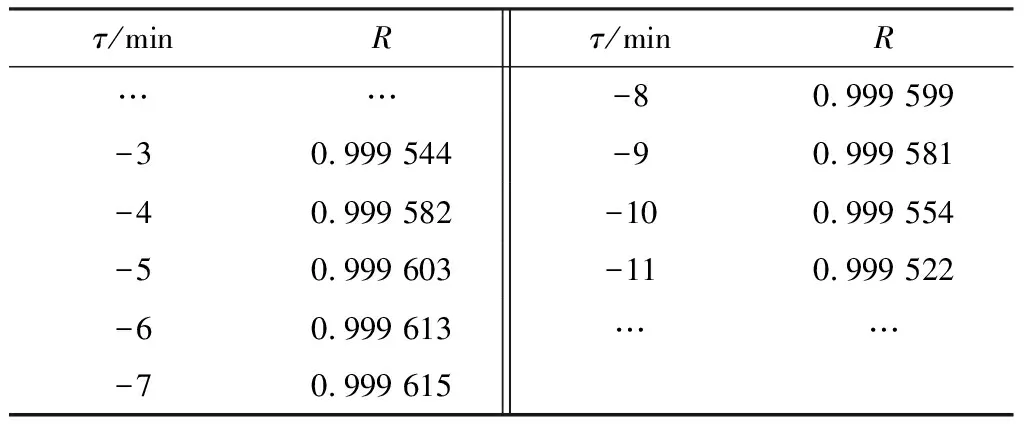
表1 时间延时与相关度对应

图6 测区GNSS高程和测区潮位曲线
4 结 语
基于GNSS测高技术的单站潮位改正方法相对于传统的单站潮位改正,考虑潮时差因素,结合时差法的潮位改正方法,能够有效提高单波束水深测量精度。该综合潮位改正方法适用于范围较小的海域水深测量。若要应用于大范围海域,需考虑大范围海域内基准面偏差变化,应将测区分区后再采用该方法处理。
猜你喜欢
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07 12:57:26
山东煤炭科技(2022年6期)2022-07-14 03:10:40
——2022 F1意大利大奖赛
世界汽车(2022年5期)2022-06-10 10:18:36
加油站服务指南(2021年7期)2021-10-14 07:28:18
河北地质(2021年1期)2021-07-21 08:16:12
雷达与对抗(2021年4期)2021-03-18 02:33:16
河北地质(2021年4期)2021-03-08 01:59:14
中国铁道科学(2019年5期)2019-10-19 07:55:14
水利水电快报(2019年2期)2019-03-08 09:56:22
测绘通报(2018年10期)2018-11-02 10:07:28