
双馈风电机组高电压穿越协调控制策略
2019-03-06 09:22蒋永梅金武杰金晨星
浙江电力 2019年2期
张 谦,蒋永梅,丁 敏,金武杰,金晨星
(国网浙江省电力有限公司舟山供电公司,浙江 舟山 316021)
0 引言
随着电力系统中风电比例的提高,风电对电力系统的影响也越来越大。为避免风电场脱网事故的发生,相关技术规程要求风电机组必须具备故障穿越能力。国内外针对无功功率过剩导致的机组电压骤升情况下的暂态控制研究较少。本文针对DFIG(双馈风电机组)HVRT(高电压穿越)方法及控制策略展开研究。
目前针对机组高电压穿越的研究已经得到国内外学者的广泛关注。文献[1-2]采用转子侧外接Crowbar(撬棒)的方法提高机组的故障穿越能力,但Crowbar投入期间,机组需从电网侧吸收无功进行励磁,不利于电网稳定。文献[3-4]采用限制风电机组电磁功率和调节桨距角来减少RSC(转子侧变流器)输入功率,从而减小传输到电容上的功率,达到抑制直流侧电压Udc升高的效果。但是调节桨距角的方法响应时间长,不能及时参与故障穿越。文献[5-6]采用加装Chopper(斩波器)和储能装置来消除变流器两侧功率流动差值,但投入Chopper可能引起电压波动。文献[7-13]采用增大GSC(网侧变流器)输出功率,但该方法成本较高。
本文综合考虑经济性、技术可行性及响应速度,以提升风电机组的高电压穿越能力和改善高电压穿越结束后风电机组的稳定运行能力为出发点,采用发电机组SSL(定子侧串联电抗)、直流侧增加卸荷电路的方法,提出GSC参与无功调节的高电压穿越协调控制策略,减少SVC(静止无功补偿装置)的投资成本,提高高电压穿越能力。并在PSCAD平台上搭建含双馈风电机组的风电场模型,仿真验证了综合控制策略的优越性。
1 电压骤升故障情况下DFIG暂态特性分析
折算到定子侧后,DFIG在两相转子坐标系中的方程如下(电动机惯例):
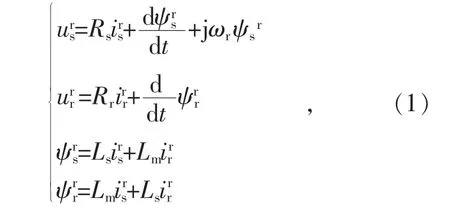
式中:上标r表示两相转子坐标系;Rs,Rr分别为定子、转子电阻;Ls,Lr分别为定子、转子电抗;Lm为定子、转子之间的互感;us,ur分别为定子、转子电压;is,ir分别为定子、转子电流;ψs,ψr分别为定子、转子磁链;ωs为同步转速;ωr为转子转速。
由式(1)可得转子磁链ψr为:

将式(2)代入式(1)中得到:

可以得出转子电压的稳态方程:

式中:s=ωr/ωs为滑差率。
设t=t0时刻电网侧任意位置发生故障,机组机端电压骤升,故障前后us为:
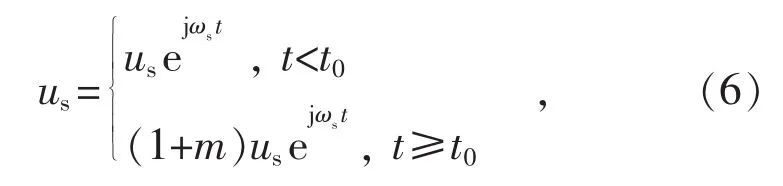
式中:m为电压骤升系数。
根据磁链守恒定律,可得故障前后ψsf方程为:

由式(7)可得,t≥t0时转子电动势为:

由式(8)可得,当t=t0时,ur0最大。因磁链不能突变,dir/dt=0。又Rr,Lr很小,忽略在其上面的压降,则转子电压最大值为:


故障前后 Rr,Lr不变,由 I=ur/Rr可知,k=根据风电机组HVRT要求可知,电压骤升系数m最大值为0.3。当m=0.3,s=0.3时,f最大,值为2。由此可知,Ir<2Irr,因此转子侧不需要加入保护装置。
定子电压的线电压最大值为 0.69×1.414=0.975 66 kV,若要保证其不通过反并联二极管对直流母线电容反充电,则需要满足定子电压上升倍数小于1.1×1.1/0.975 66=1.24。因此,当us≤1.24uN时,直流母线侧不需要加入保护装置;当us>1.24uN时,us通过反并联二极管对电容反充电,此时需要加入保护装置[14]。
2 基于HVRT约束的DFIG控制架构
为了提升机组HVRT能力和HVRT结束后的稳定性,本文提出基于SSL和Chopper保护电路的控制策略实现DFIG高电压穿越,其结构如图1所示。
2.1 SSL阻值的整定
SSL由一组电感和可控晶闸管并联组成。故障发生前,晶闸管导通,使电感被旁路;发生故障时,晶闸管关断,电感被串入线路中。
将式(1)中消去 is, us, ψr, 得到关于转子电流的一阶微分方程:

将式(11)带入EMF表达式中得到故障发生前的EMF为:

式中:s为转差率。
同理,故障后的EMF为:
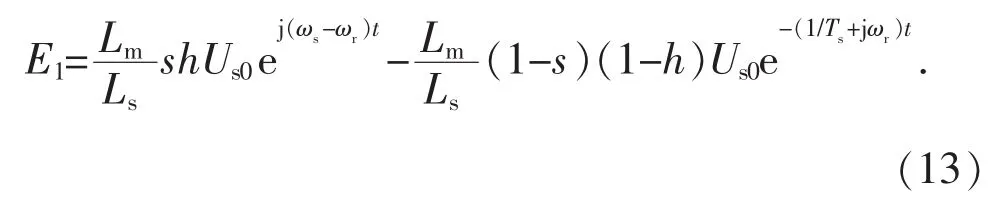
EMF的大小与绕组切割磁场的速度成正比。定子磁链中的暂态衰减分量产生的是静止磁场,转子绕组以ωr的速度切割该静止磁场,感生的电动势与ωr(或者说1-s)成正比。而强制周期分量在转子中感生的电动势与s成正比。
联立式(11)、 (13),得到故障后关于转子电流ir的一阶微分方程:

解方程(14),故障后转子电流方程为:

式中: σ′=1-Lm/Lr(Ls+SSL); C 为常数, 且有 C=ir(0-)。
变流器采用SVC变流器调制方式,变流器输出电压的幅值上限为,将式(15)中的替换为; 转子电流最大值出现在故障后1/2周期左右,因此时间取0.5T(T为同步周期)。因此由式(15)得到的转子电流峰值的表达式为:
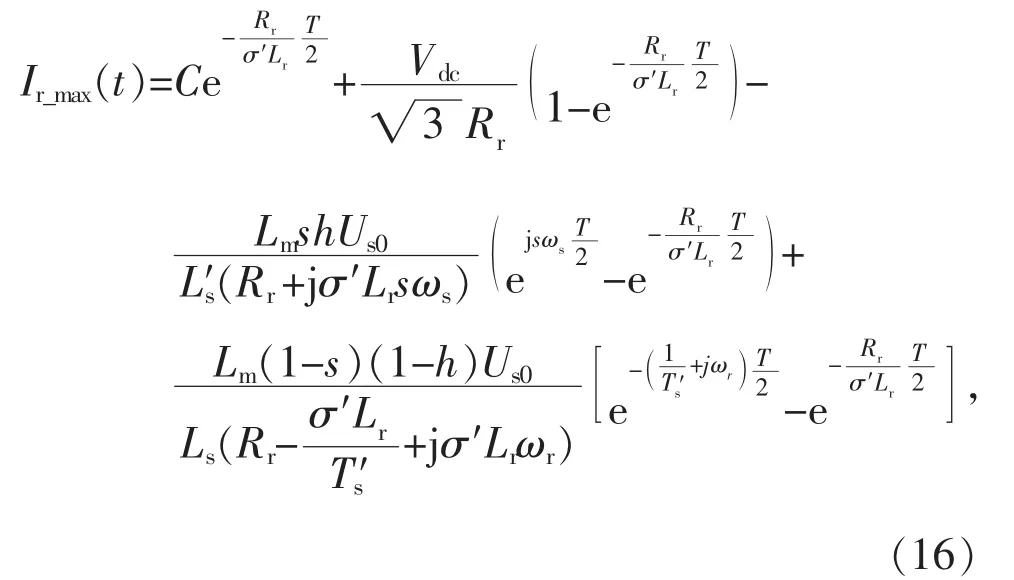
式中:Udc是直流母线上的电容电压。式(16)是关于定子串联电抗的一元复杂函数,可以通过作图法对定子串联电抗阻值进行整定,转子电流最大值为Ir_th=1.5 p.u.。
2.2 卸荷电路的控制策略
传统的投切方式为:当Udc小于Udc-max时,Chopper不投入;当Udc不小于Udc-max时,快速投入Chopper。卸荷电阻/ΔP为变流器两侧功率流动差值。
本文提出一种改进的Chopper控制方法,投切逻辑见图2。图中:U1为卸荷电路切除门槛值(0.9 p.u.); U2为卸荷电路投入门槛值(1.1 p.u.)。当Udc≥U2时,卸荷电路投入;Udc<U1时,卸荷电路切除。
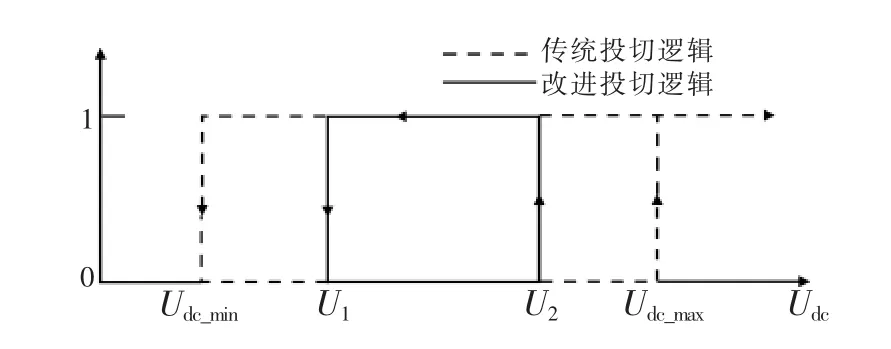
图2 卸荷电路投切逻辑
当采用传统投切方法时,直流电压曲线出现突变,且Chopper长时间投入,不利于散热。然而采用本文提出的方法时,直流侧电压波动幅值很小,且Chopper间歇性运行,大大缩短了在电路中的运行时间,有利于散热。直流侧电压对比如图3所示。
2.3 GSC无功控制策略

图3 直流侧电压对比
当电网电压骤升时,若电压在1.24 p.u.以内,控制GSC使其发出感性无功,实现机组高电压穿越;网侧无功控制策略如图4所示。
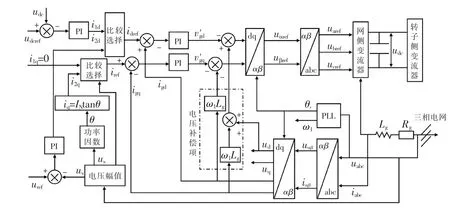
图4 GSC控制框图
3 基于HVRT约束的DFIG控制策略
研究表明,SSL在电压骤升较高(1.24~1.3 p.u.)时投入运行可有效限制转子侧短路电流;电压骤升较低(1.1~1.24 p.u.)时, SSL 接入电路对机组的稳定运行造成不利影响。为了提升机组的高电压穿越能力和高电压穿越结束后机组稳定运行能力,本文所采用的控制策略如图5所示。
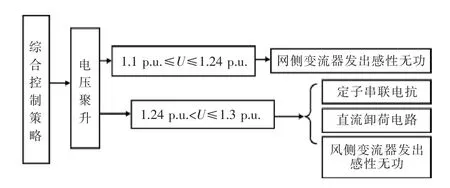
图5 DFIG实现故障穿越控制策略
当电网电压骤升时,若电压在1.24 p.u.以内,控制GSC使其发出感性无功,实现机组高电压穿越;若电压继续骤升至1.24 p.u.以上,可能会出现转子侧过电流、直流母线侧过电压,此时通过投入SSL限制转子侧过电流,投入卸荷电路限制直流母线侧过电压。
4 仿真验证及分析
4.1 故障穿越仿真模型
为仿真验证该方案的正确性,基于PSCAD/EMTDC平台搭建双馈风电场并网模型,如图6所示。机组部分参数见表1,卸荷电阻取0.3 Ω。
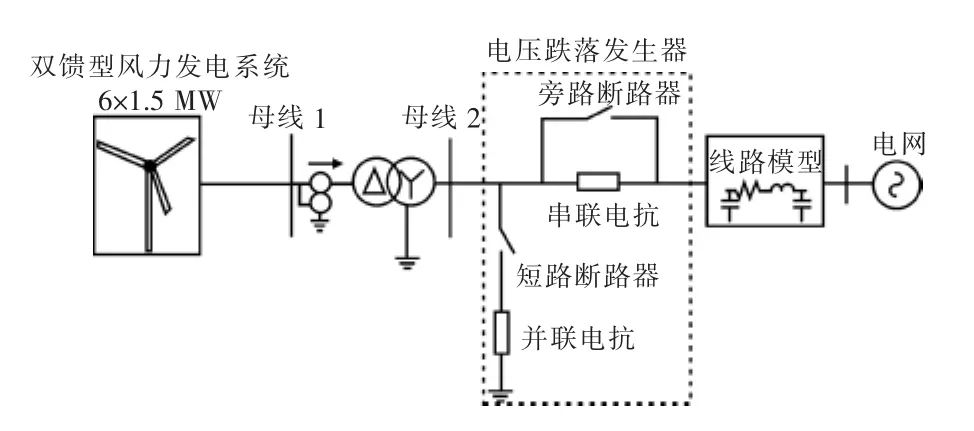
图6 风电系统高电压穿越仿真模型
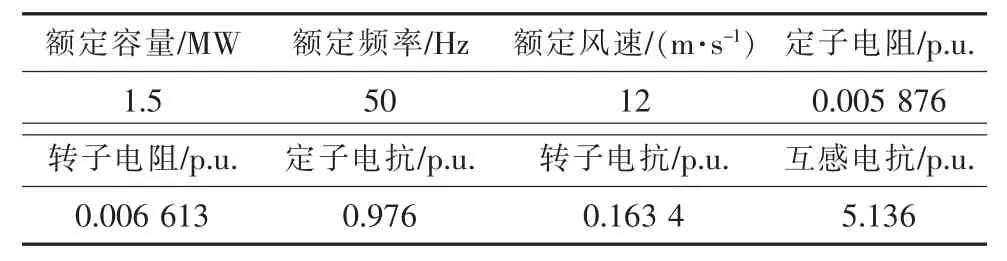
表1 双馈风电机组参数
4.2 HVRT特性仿真分析
图7为并网点电压u,定子电压us,直流电压udc,网侧电流ig,机组有功功率Pg,机组无功功率Qg仿真曲线。由图可见,t=2 s时u骤升30%,t=2.625 s时刻结束。
图7中,DFIG在并网点电压骤升情况下并未脱网,GSC向系统输送感性无功时输出电流低于正常值,且并未出现过流现象。本文的Chopper控制策略,阻止了udc的上升,保证了变流器和机组安全;在机组HVRT时,GSC能够快速响应电压骤升情况,向系统输送一定的感性无功,降低并网点电压使其恢复至额定状态。由此可见,本文提出的定子串联电抗、直流侧Chopper、GSC感性无功模式相互配合的方法是可行的,能够帮助双馈风电机组实现HVRT。
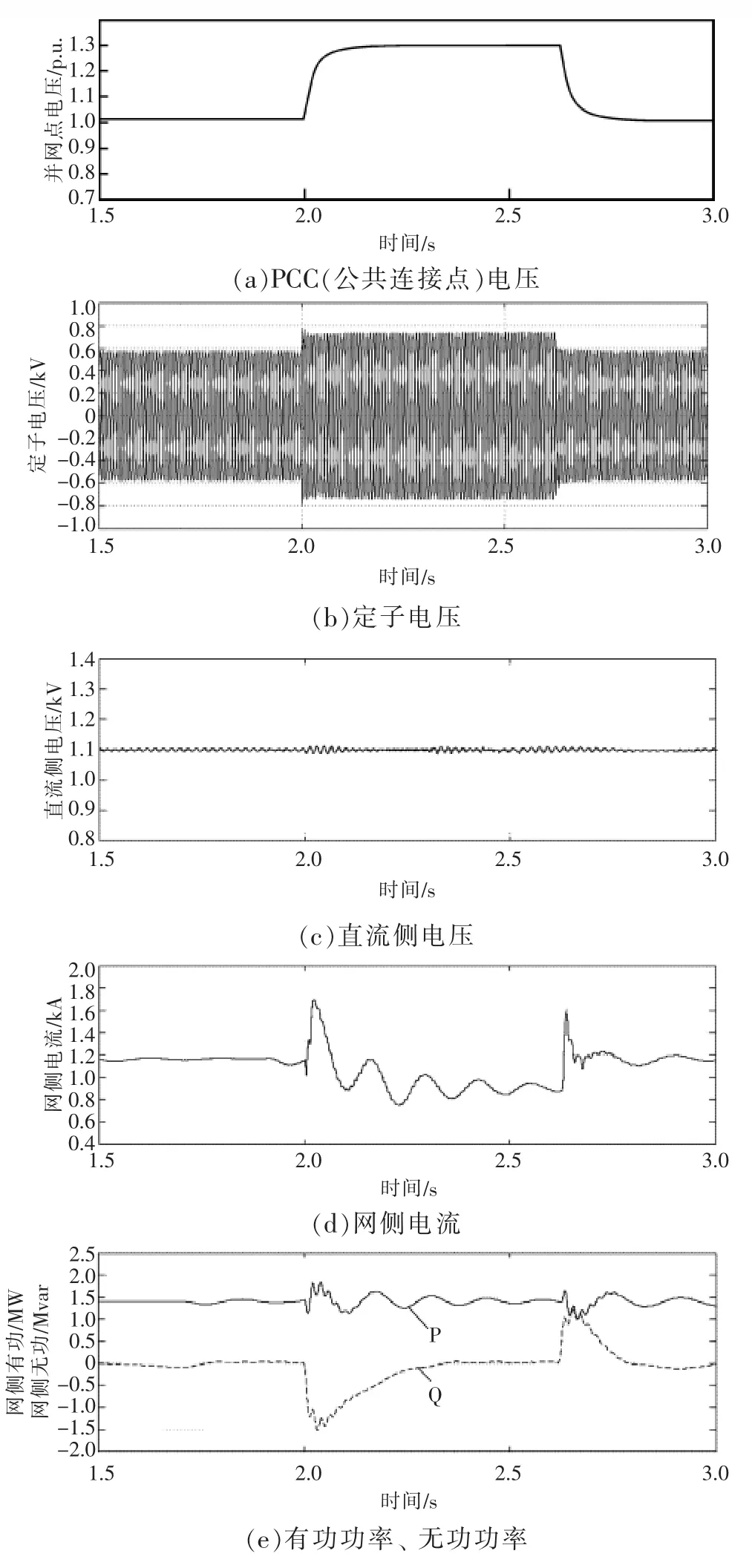
图7 双馈机组HVRT特性曲线
5 结语
为改进传统高电压穿越技术,本文采用定子串联电抗和直流侧卸荷电路限制转子侧过电流及直流母线侧过电压。在电网电压骤升故障情况下,GSC无功控制策略发出感性无功,拉低电网电压。并在PSCAD/EMTDC中构建并网模型,验证了该控制策略的可行性和优越性。
猜你喜欢
安徽建筑(2022年1期)2023-01-08
煤炭学报(2022年8期)2022-09-20
舰船科学技术(2022年11期)2022-07-15
机械管理开发(2022年2期)2022-05-12
宁夏电力(2022年1期)2022-04-29
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
电子制作(2018年8期)2018-06-26
