
部分观测下结构质量及非线性恢复力免模型识别
2019-03-05 09:33李靖,许斌,2
噪声与振动控制 2019年1期
李 靖,许 斌,2
(1.华侨大学 土木工程学院,福建 厦门 361021;2.华侨大学 福建省结构工程与防灾重点实验室,福建 厦门 361021)
对工程结构在强动力荷载作用下的损伤位置与程度进行识别,进而对其安全性、剩余承载力和剩余寿命进行预测,是结构健康监测及灾后状态评估的主要内容[1]。依靠从结构动力响应中抽取结构特征值和特征向量,识别结构刚度变化来描述结构损伤,是传统结构损伤识别的基本思路。严格来讲这种思路仅仅适用于线性结构。事实上,非线性广泛存在于工程结构中,如裂缝的开展、构件中钢筋与混凝土的粘结滑移以及钢结构连接节点的松动等都导致土木工程非线性[2]。结构恢复力是结构非线性行为发生发展过程的最直接表征,不同时刻结构的损伤分布有助于帮助理解结构破坏模式的转变过程,并可定量描述结构在振动过程中的耗能[3-4]。但由于土木工程材料和结构形式的多样性,实际工程结构的恢复力模型的参数化形式及其参数难以事先准确获得。因此,开展不依赖于结构恢复力的参数化模型的结构非线性行为识别的一般化方法研究具有重要意义。
相对于线性系统,由于非线性行为复杂且多样,非线性系统的识别难度较大。Masri和Caughey[5]最早提出了恢复力曲面法,并将其运用到非线性多自由度动力系统识别[6]。Xu等[7-8]利用激励和结构完整动力响应信息,分别基于等效线性理论和幂级数多项式模型识别结构非线性恢复力,并通过装有磁流变阻尼器的四层剪切型框架结构的动力响应测量数据,验证了该方法的有效性。此外,许斌等[9-10]利用切比雪夫多项式表征非线性恢复力,通过含磁流变阻尼器(Magnetorheological,MR)和形状记忆合金阻尼器(Shape Memory Alloy,SMA)的非线性多自由度系统验证了该方法的有效性。
针对激励以及测量信息不完整的情况,Xu等[11]提出了一种自适应加权迭代算法,在部分输入未知情况下识别线性构件的参数和荷载,并将其与幂级数多项式结合,实现了部分激励未知的非线性系统识别[12]。王云等[13]考虑识别结构质量的必要性,提出利用扩展卡尔曼滤波(Extended Kalman Filter,EKF)和切比雪夫多项式的迭代算法,通过迭代识别了结构质量和非线性恢复力。何明煜[14]将幂级数多项式引入无迹卡尔曼滤波(Unscented Kalman Filter,UKF),提出一种部分响应未知的非线性恢复力识别方法。
本文提出一种不依赖于结构非线性恢复力的参数化模型,仅利用结构部分加速度响应,对结构非线性恢复力和质量进行同时识别的迭代方法。在一个多自由度集中质量结构的数值模型中,引入两种不同模型的磁流变阻尼器,考虑不同的初始质量以及一处和多处存在非线性元件情况,通过数值模拟识别结构恢复力和质量。识别结果与理论值的比较验证了所提出方法的有效性和鲁棒性。
1 非线性恢复力及质量识别迭代算法
1.1 等效线性化
对于一多自由度的非线性动力系统,在外激励作用下的平衡方程可写成

其中:M为结构质量矩阵,(t)为加速度响应,Rnon(t)为非线性恢复力,F(t)为外激励。式(1)的等效线性系统的动力方程为

其中:ME、CE、KE分别表示系统的等效线性质量、等效线性阻尼和等效线性刚度,ẋ(t)和x(t)分别为速度位移响应。一般认为,在非线性发生、发展过程中,结构质量不存在非线性以及变化,因此,式(2)中ME可认为是体系M的识别值。系统非线性恢复力可表示为

1.2 引入等效线性的无迹卡尔曼滤波质量迭代识别
相较于EKF对非线性函数的1阶线性化处理,UKF使用无迹变换来处理均值和协方差的非线性传递,计算精度较高,不需要计算EKF中繁琐的Jacobian矩阵,且能适用于强非线性系统。
本文构建UKF的方法不同于文献[13-14],将等效线性参数引入UKF状态向量中,避免状态向量中非线性模型参数或幂级数多项式模型系数数量过多。特别是结构出现多处非线性时,有效减少状态矩阵维数,避免参数过多而导致的收敛困难。在结构损伤定位后有效识别结构非线性恢复力。
对于一般质量位置的n自由度动力系统,本文将质量引入状态向量中,其定义如下

其中:xn,ẋn分别代表结构的第n个自由度的位移和速度,kEn,cEn,mn分别代表第n个自由度的等效线性刚度、等效线性阻尼和质量。状态向量的均值为,协方差为P,状态转移方程和观测方程满足以下非线性方程

其中:g和h分别为状态方程和观测方程函数,vk表示协方差为Rk的观测噪声矩阵。
状态向量中结构速度、位移和质量的识别过程如下。
(1)第k-1时刻2L+1个样本点的确定
(2)样本点的权值的确定
其中:Xi,k-1表示第k-1时刻第i个样本点,分别对应第i个样本点均值和协方差的权值,δ和η分别对应均值和协方差。L为状态向量维数;γ=α2(L+κ)-L为缩放比例参数,α决定样本点与均值点的距离,通常取10-4≤α≤1;κ为另一个比例参数,通常设为0;β结合了状态χ的分布先验知识,对高斯分布,一般取β=2;()i表示矩阵平方根第i列。
(3)时间更新

(4)量测更新

至此,通过一次循环可得到状态向量中结构速度、位移、等效线性参数及质量的更新值。若质量识别结果收敛,则终止循环,否则将质量迭代更新值代入式(4)中,继续循环迭代。
1.3 基于等效线性和UKF的结构恢复力及质量识别迭代算法
本文提出的基于等效线性和UKF的结构非线性恢复力及质量识别迭代算法的步骤如图1所示。
(1)假设质量初始值m;
(2)引入等效线性的理论,利用UKF得到结构质量识别值,同时得到结构速度与位移响应;
(3)收敛判断:根据式(23)计算误差ε,若满足收敛标准,则停止迭代;否则令m=,重复以上步骤,本文质量收敛判断准则为前后两次迭代误差小于1%

(4)利用等效线性理论识别非线性恢复力。

图1 结构非线性恢复力与质量识别流程图
2 数值算例
为了研究初始误差较大时算法的适用性,本文取质量初始值误差为±20%,并向已知加速度中混入4%的白噪声,以检验算法的抗噪性。采用的随机激励时程如图2所示。荷载作用时间和步长分别为2秒和0.001秒。结构响应采用Newmark-β法计算。

图2 结构随机外激励荷载时程
在本文中,结构层间总恢复力包含有线弹性恢复力、黏性阻尼力以及非线性构件MR阻尼器提供的非线性阻尼力。在识别的总恢复力中扣除结构的线弹性恢复力和粘性阻尼力得到阻尼器的阻尼力,并与其理论值进行比较。体系中非线性构件MR阻尼器提供的恢复力可以根据下式确定

式中:Fnon为非线性构件MR的阻尼力。
2.1 算例一
在一个4自由度的集中质量结构的第二层引入一个磁流变阻尼器MR的模拟结构非线性行为。不失一般性,考虑结构仅在第4个自由度受外激励作用,如图3所示。
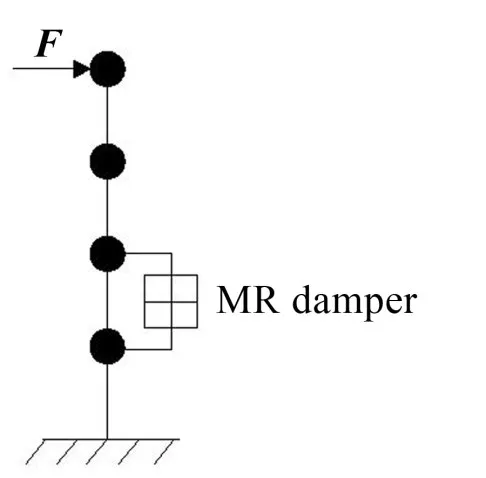
图3 计算模型
线性结构各层质量为400kg,刚度为3.0×105N/m,阻尼为220 N⋅s/m。MR阻尼器采用Bingham模型[15],其表达式为
3.2.1.完善单位内部控制环境,进行全面的风险评估。完善单位内部控制环境,首先明确董事会职责及成员的产生方式,通过民主的方式产生董事会成员,建立科学的激励与约束机制,以组织文化为基调规范人员行为[6]。同时,需要专业的风险评估人员建立专业的风险评估机制。单位应懂得适时规避财务、信息、策略等方面的风险,并及时运用风险评估方法,判断出风险的大小与性质。

式中:FnBohn为MR阻尼器的恢复力,fc,C0及f0为模型系数,取值为fc=20N,C0=600N⋅s/m,f0=0。
假设4个自由度质量的初始误差为真实值的±20%,并假设第三层加速度响应为未知。质量迭代识别结果如图4所示。
经过几次迭代,质量在较大的初始误差下实现快速收敛,结果如表1所示。结构质量识别误差在0.5%以内。
图5给出了识别的结构第二、第三层速度、位移与真实值对比图。可见采用UKF能准确地识别结构的速度和位移响应。
表2给出了识别的等效线性参数结果。由结果可见,结构等效刚度值与真实值相差不大,说明MR阻尼器对结构刚度影响很小。
而第二层等效线性阻尼值与线性结构的阻尼值差别较大,这与MR阻尼器位于结构第二层相吻合。根据识别的结构等效线性参数,利用式(24)可以识别阻尼器提供的非线性恢复力。

图4 质量迭代识别图

表1 质量识别结果/kg

表2 等效线性参数识别结果
MR阻尼器的识别值与理论值的比较如图6所示。
结果表明,恢复力识别值与真实值吻合良好。在两种不同的质量初始值下,真实值与识别值之间的均方根误差分别为12.6 N和13.2 N,说明算法在较大初始质量误差下系统恢复力识别值均具有较好精度。
为了将本文方法与EKF进行比较,将等效线性和质量矩阵引入EKF中进行质量迭代识别,收敛准则不变。
从图7可看出,相较于UKF识别方法,EKF算法质量识别迭代过程收敛较慢,即使经过多次迭代,误差依然较大。通过两种方法对比,说明本文提出的方法在较大的初始质量误差下质量识别的收敛性能较好。

图5 结构第二、三层位移、速度响应识别结果
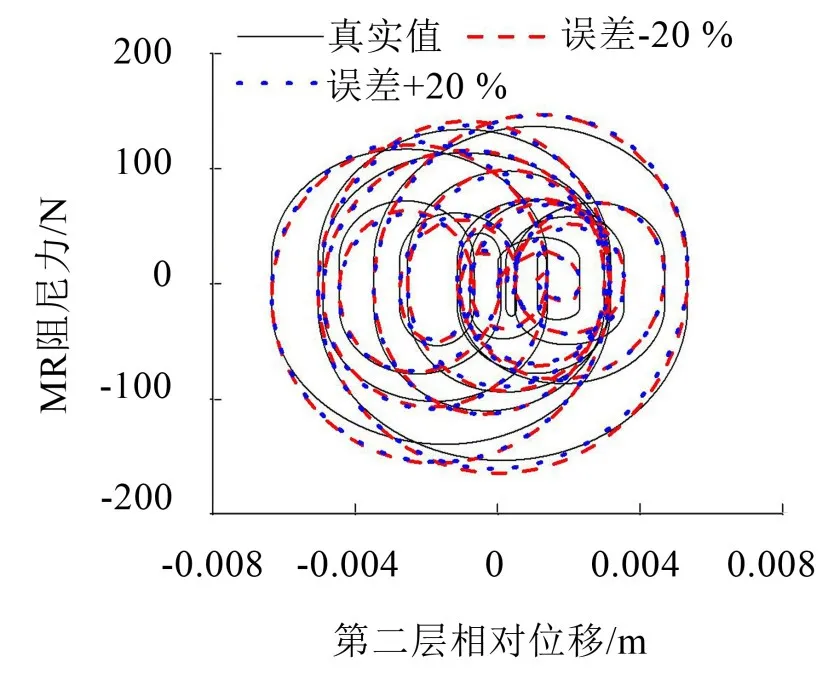
图6 MR阻尼器恢复力识别结果
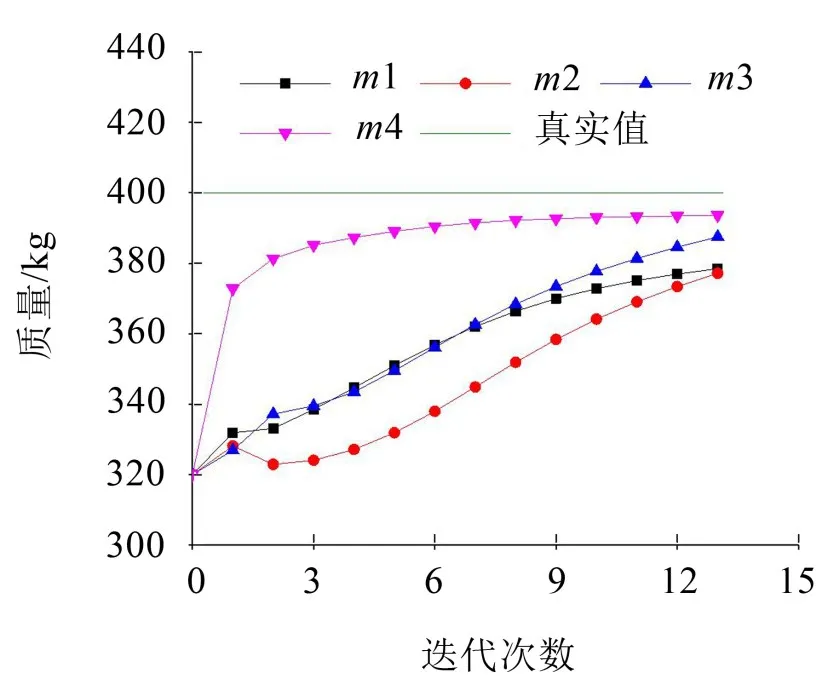
图7 EKF质量迭代过程
2.2 算例二
工程结构在强荷载作用下往往会出现多处损伤,为验证本文所提出的算法在结构出现多处损伤时的适用性,在一个6个自由度集中质量结构的第四、第六层均引入的MR阻尼器。
不同于以上算例,本算例中阻尼器恢复力采用Dahl模型[16],其表达式为

其中:K0,C0,Fd,f0,σ为模型参数,Z为无量纲滞回量。各参数取值为,K0=20N/m,C0=500N⋅s/m,Fd=35 N,σ=200s/mf0=0。结构各层质量、刚度和阻尼值与算例一相同。不失一般性,外激励作用于结构的第五层。令第二、四层加速度未知,其中第四层为非线性所在层。并同样向已知加速度响应中加入4%的白噪声。假设质量初始值为真实值的80%。质量迭代识别过程如图8所示,质量和等效线性参数识别结果如表3所示。
从表3可以看出当结构存在多处非线性时,本文算法依然可精确识别结构质量,最大误差仅为0.85%。将UKF识别的等效线性参数与线性值对比,可判断非线性特性存在于结构第四、第六层,与真实情况相符。
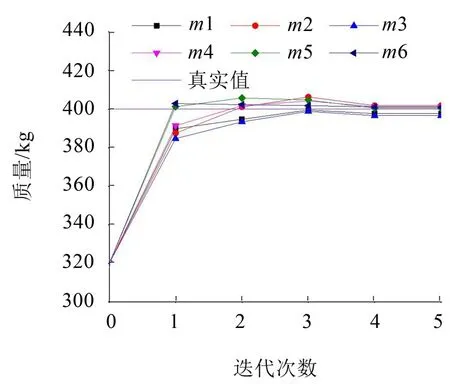
图8 质量迭代识别收敛结果

表3 质量和等效线性参数识别结果

图9 MR阻尼器恢复力识别结果
同时,利用UKF识别的结构等效线性参数及速度位移响应可识别结构非线性层的恢复力。MR阻尼器提供的非线性恢复力识别结果与真实值得对比如图9所示,二者吻合较好。
两个MR阻尼器阻尼力的识别结果的误差均方值分别为6.7 N和4.6 N,说明结构在多处存在非线性时,该方法能有效地识别系统的质量和非线性恢复力。结合算例一,可见该方法对不同的非线性模型具有较好的适用性。
3 结语
本文提出了一种仅利用结构部分加速度响应测量和外激励的结构非线性恢复力及质量的免参数化模型的识别方法。该方法最为明显的优势是不需要已知结构质量及非线性行为的参数化模型,并且减少了算法对完整动力响应的依赖。将等效线性参数以及结构质量加入UKF的状态向量中,通过循环迭代实现结构的非线性行为和质量的识别。避免扩展向量和矩阵维度过大,对结构出现多处非线性的情况特别有意义。
在两个多自由度链式结构的数值模型中引入不同恢复力模型的MR阻尼器,构成非线性系统。通过数值模拟表明,在较大质量初始误差、量测噪音影响以及结构出现多处非线性行为的一般情况下,基于结构部分自由度上的加速度响应测量,可实现系统质量和非线性恢复力的有效识别,该算法具有较强一般性和抗噪性。
本文提出的多自由度系统非线性行为的时域算法能对系统的非线性特性进行定位和定量评估,对工程结构的损伤识别,特别是必须考虑结构非线性行为的灾后评估提供了有效方法。
猜你喜欢
施工技术(中英文)(2022年9期)2022-06-21
建材发展导向(2022年5期)2022-04-18
广东建材(2022年3期)2022-04-13
中学生数理化·高一版(2021年2期)2021-03-19
科学技术与工程(2020年29期)2020-11-24
农业工程学报(2020年3期)2020-04-09
灾害学(2019年3期)2019-07-11
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
卷宗(2018年14期)2018-06-29
