
机械制冷机微振动固支测力修正
2019-03-05 09:32聂云松闫秀荣童卫明
噪声与振动控制 2019年1期
马 军,聂云松,闫秀荣,童卫明
(北京空间机电研究所,北京 100094)
随着遥感卫星空间分辨率的提高,在轨微振动环境成为可能影响卫星成像质量的因素之一[1-2]。机械制冷机工作过程中其内部活动部件的运动会产生微振动,因此,对于采用了机械制冷机的高分辨率遥感卫星,有必要进行制冷机微振动测试并基于测试结果开展微振动对卫星成像质量影响的分析。
固支测力法在机械制冷机微振动测试中得到了广泛应用[3-5],但其测试结果的工程应用仍存在两方面问题:一是测试耦合了制冷机支撑结构刚度和重量的影响,所测得的力相对制冷机实际输出的微振动力有误差;二是所测得力的等效作用点为测力平台上产品安装面几何中心处的一个虚点,使用测试结果进行微振动响应分析时,载荷加载位置不明确。
对于固支测力结果工程应用存在的问题及其处理方法,文献[5]提到了制冷机支撑工装的刚度和质量对测试精度存在影响,但未提出解决问题的办法;文献[6]提出扰振响应分析时将扰振力加载在扰振源安装界面处,实现扰振源与主结构的解耦,以得到主结构的准确响应,但未给出准确加载位置的确定方法,同时,该处理方法也不能获得制冷机组件在弹性边界条件下的响应。国外有关制冷机微振动的文献较多,但大多是对振动特性及振动影响进行研究[7-8],未检索到对固支测力结果存在的问题及其处理方法有关描述的内容。
文章基于动力学分析提出一种机械制冷机微振动固支测力修正方法,解决了固支测力结果工程应用中存在的载荷值有误差以及加载位置不明确的问题,并结合工程实例对修正方法进行了说明。
1 微振动源
机械制冷机的微振动来源于其动子系统的简谐运动,可用其动子处离散力谐波的合成表示[4,9],如式(1)所示

式中:Ff(t)为总的微振动力,n是谐波总数,Afi为第i个谐波对应的谐波幅值,ωfi是第i个谐波的圆频率,其值为ωfi=2πfi=2πif1,f1为制冷机工作频率;φfi是随机相位角,在[0,2π]之间均匀分布。
2 固支测力法
制冷机微振动固支测力原理如图1所示,测试时制冷机通过支撑结构固定在测力台安装界面上,其微振动力输出等效成作用在测力台上产品安装界面几何中心O点处的3个方向的微振动力Fx、Fy、Fz以及3个方向的微振动力矩Mx、My、Mz。

图1 制冷机微振动固支测力原理图
测力台结构形式如图2所示,文献[10]对测力台的工作原理进行了描述。

图2 微振动测力平台
工程应用中,中等以上口径的空间遥感器的基频一般不大于100 Hz,微振动响应分析考虑遥感器基频3倍频以内的微振动力谐波即可。因此,制冷机微振动固支测力结果常以300 Hz以内制冷机工作频率整数倍频处3个方向微振动力幅值和3个方向的微振动力矩幅值的形式给出。
3 修正原理
将图1所示的制冷机及其支撑结构组成的制冷机组件离散化,其动力学方程如式(2)所示
式(2)中:M0、C0、K0、{f}、{x}分别为制冷机组件的质量阵、阻尼阵、刚度阵、载荷列阵以及节点位移列阵,阻尼矩阵C0为比例阻尼,即

式(3)中:α,β分别为比例系数。
将节点位移列阵{x}分为自由节点位移列阵{xr}、加载节点位移列阵{xf}以及约束节点位移列阵{xj}3部分,对应的载荷列阵{f}也分为自由节点载荷列阵{fr}、加载节点载荷列阵{ff}以及约束节点载荷列阵{fj},即

考虑式(3)、式(4)、式(5),式(2)写为

约束节点载荷列阵{fj}写为

式(7)中:M0为集中质量阵,则Mjr=0,Mjf=0;约束点固支,则;式(7)简化为

引入变换

式(9)中:n为自由度数,为正则化的振型向量矩阵,为模态坐标列阵。
式(9)代入式(2)并在等式两端左乘ФT,考虑到式(5)以及正则化振型矩阵Ф对质量阵、比例阻尼阵以及刚度阵的正交性,式(2)可写为

{fr}为自由节点载荷列阵,故为固支状态振型向量,则Фji={0 },式(10)写为
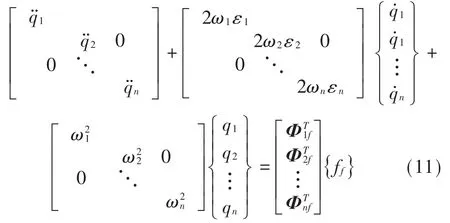
考虑扰振力为制冷机微振动输出力的单个简谐分量,参考式(1),{ff}写为

式(12)代入式(11),求解前p阶模态坐标的稳态解,有

式(13)中Ap为幅值放大倍数矩阵,其值为

其中:

φqi为单阶模态响应与微振动简谐分量间的相位差
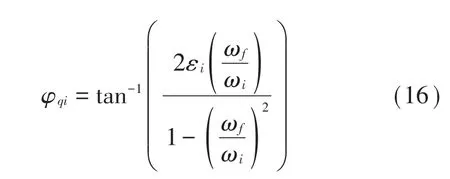
式(15)、式(16)中:i=1,2,…,p。
对微振动,模态阻尼比εi<0.005;微振动抑制要求通过结构设计保证微振动各简谐分量与组件模态不出现共振耦合,即,可得<5.57°,因此,可认为

式(13)简化为

根据振型叠加静力修正法有
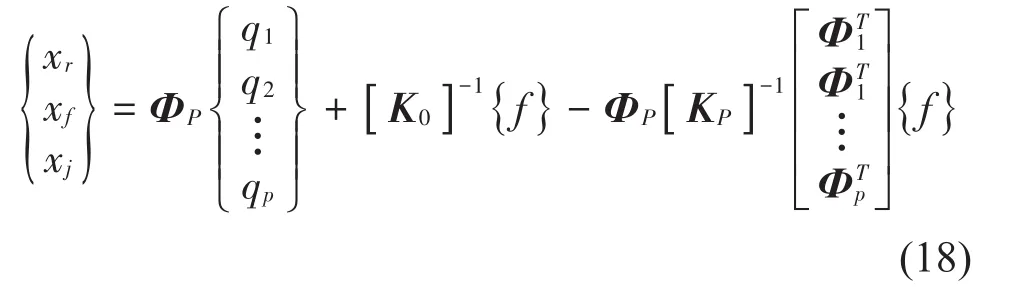
式(18)中
ФP=[Ф1Ф2…Фp],KP=,[K0]-1为静力柔度矩阵,[KP]-1为模态柔度矩阵。
将式(12)、式(17)代入式(18),有

式(19)中:[Kf]-1为加载节点静力柔度矩阵

对式(19)求导,有

将式(19)和式(21)代入式(8),{fj}写为简谐形
式,有

式(22)中{Aj}为约束节点反力幅值列阵,φj为约束节点反力相位。考虑式(22)两边幅值相等,则

其中:

{Aj}向测力台面几何中心O点处等效的转换矩阵为T0,固支测力法输出的力幅值列阵{At}表示为

式(25)左右进行广义逆矩阵计算,可得

式(26)建立了固支测力法测得的微振动力幅值列阵{At}与制冷机动子处输出的微振动力幅值列阵{Af}间的联系,可通过{At}求得{Af},将测试所得的等效在测力台面几何中心O点处的频率为ωf的微振动力幅值转化为制冷机动子处的微振动力幅值,制冷机各倍频处微振动力的修正结果进行合成即可得到其动子处包含多次谐波成分的微振动输出力。
4 误差分析
对测试结果进行修正的过程中,除计算舍入误差外还可能引入的误差项有:
(1)模态分析误差;
(2)静力柔度矩阵求解误差;
(3)阻尼参数误差;
(4)模态截断误差;
(5)模态坐标求解过程中忽略模态响应与微振动源间相位差所带来的误差。
第(1)、第(2)两项误差是有限元分析过程中必然存在的误差,可通过对被测组件进行模态试验,结合试验结果修正有限元模型,减小误差;第(3)项误差为参数取值误差,可通过试验获取结构实际阻尼参数,提高参数取值精度;节点位移对制冷机动子处微振动输出力响应的求解采用振型叠加静力修正法,该方法用模态截断后剩余柔度的伪静态响应替代被截断的高阶模态动响应,可通过提高截断频率增加二者近似度以减小第(4)项误差,工程实践中可将截断频率取至最大扰振频率的3倍以上;第(5)项误差为简化计算所带来的误差,其大小取决于制冷机微振动谐波与被测试组件各阶模态的共振耦合程度。
对于第(4)、第(5)两项误差,可在求得{Af}后将{Af}sinωft加载在原有限元模型上,使用通用有限元分析软件反向求得等效在测力台面几何中心处的载荷振幅列阵,通过比对与{At}间的差值对误差大小进行确认。
5 工程实例
某遥感卫星上使用的机械制冷机及其支撑结构如图3所示。制冷机由膨胀机和压缩机组成,微振动主要来自于未进行动量平衡的膨胀机动子处,膨胀机和压缩机分别通过夹块安装在主支架上,微振动测试时将制冷机组件通过主支架上的安装孔固定在测力台上。
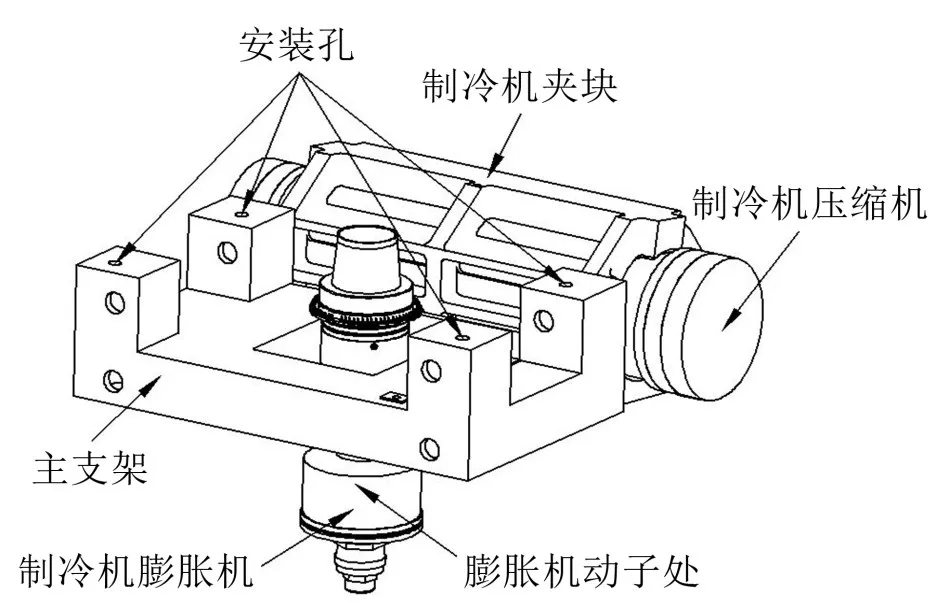
图3 制冷机及其支撑结构
制冷机组件的有限元模型如图4所示,选取与支架安装孔位置对应的节点定义为约束节点,选取与膨胀机动子位置对应的节点定义为加载节点。
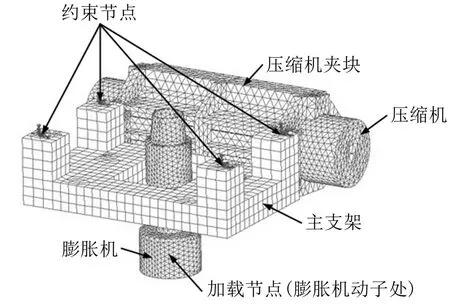
图4 制冷机组件有限元模型
约束节点所有自由度位移都取零,对制冷机组件进行模态分析和加载点柔度矩阵求解。基于模态分析和加载点柔度矩阵求解结果,通过式(26)对固支测力结果进行修正,修正所得微振动力作用点为加载点,其位于膨胀机动子处,为制冷机微振动的实际产生位置。修正过程提取式(20)、式(24)中矩阵下标所标识的计算所需的部分质量矩阵、部分刚度矩阵,提取制冷机组件900 Hz内的各阶模态,1阶、2阶模态阻尼比分别取0.002和0.003。转换矩阵T0的求解可参照文献[10]中有关测力台标定力向测力台面中心等效转化的转化矩阵求解方法。需要注意的是,实际计算过程中微振动力幅值列阵{Af}和约束力幅值列阵{Aj}的各分量需要区别符号的正负,其物理意义表示同一时刻各方向扰振力的振动方向与分析坐标系坐标轴是否一致。
制冷机的工作频率为54 Hz,修正前后300 Hz以内各阶微振动力幅值如表1所示。由表1可知,对3个方向的微振动力,制冷机工作频率3、4、5倍频处修正前后相对差超过都超过5%;对3个方向的微振动力矩,制冷机工作频率各倍频处修正前后有都力矩相对差都超过50%。由此可见,制冷机支撑结构的刚度和质量影响了其微振动固支测力结果的准确性,固支测力结果使用前有必要对其进行修正。
将修正所得的微振动力加载在制冷机组件有限元模型中的制冷机动子处,反算出制冷机组件约束反力在测试台面几何中心处的等效力幅值,与测得的微振动力幅值对比如表2所示。由表2可知,制冷机工作频率各倍频处微振动力振幅的反算值与测得值相对差都小于5%,第4节中所述的忽略相位差引入的误差与模态截断引入的误差之和不超过5%,修正过程所引入的这两项误差可接受。

表1 修正前后微振动力幅值对比

表2 微振动力振幅反算值与测得值对比
6 结语
本文基于动力学分析提出一种机械制冷机微振动固支测力修正方法,将固支测力法测得的等效作用在测力台上产品安装面几何中心处的微振动力幅值转化为作用在制冷机动子处的微振动力幅值,形成的结论如下:
(1)修正所得的微振动力频谱特性反映了制冷机实际输出的微振动力频谱特性,力的作用点为制冷机微振动实际产生位置,解决了固支测力结果工程应用中存在的载荷值有误差以及加载位置不明确的问题。
(2)结合模态试验修正制冷机组件有限元模型并确定阻尼参数,提高模态截断频率,修正计算前确认制冷机微振动谐波与制冷机组件模态的耦合程度,通过修正结果反算对部分误差项大小进行确认,这几项措施都可提高修正精度,将修正过程中新引入的误差控制在可接受范围内。
该修正方法的工程应用意义在于:
(1)结合误差控制措施,制冷机采用不同形式的结构件固支都可通过该修正方法得到相对准确的微振动力,对制冷机微振动固支测力过程中支撑结构件的结构形式和支撑刚度要求降低;
(2)使用修正结果进行制冷机微振动特性评估,能更准确反映制冷机实际输出的微振动力频谱特性;
(3)将修正所得的微振动力加载在微振动响应分析有限元模型中的制冷机动子处,能模拟出制冷机在弹性边界条件下与主结构的耦合作用,加载方式更准确。
猜你喜欢
科学技术创新(2022年34期)2022-12-07
仪表技术与传感器(2022年7期)2022-08-30
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
石油化工建设(2020年1期)2020-08-24
中国设备工程(2019年20期)2019-01-19
中国港湾建设(2017年11期)2017-12-19
摄影之友(影像视觉)(2017年1期)2017-07-18
制导与引信(2016年3期)2016-03-20
航天返回与遥感(2016年4期)2016-02-23
