基于复杂纹理的遥感影像数据水印加密算法
2019-02-28 02:43李甜秦思娴乔炜李琼
城市勘测 2019年1期
李甜,秦思娴,乔炜,李琼
(武汉市测绘研究院,湖北 武汉 430022)
1 引 言
随着遥感产业在我国军事政治、经济建设等方面起到越来越突出的作用,遥感影像成为国家重要的基础性、战略性信息资源成为科学规划、环境保护、资源开发、军事作战等工作的重要工具。近年来,随着数字化和网络化的飞速发展,遥感影像的传输、复制等都变得非常方便快捷,以Google Earth为代表的大众化影像地图软件,极大地推动了地理信息与遥感行业的普及和发展。伴随影像的广泛应用,如何保护遥感数据的安全已成为迫在眉睫的问题。
数字水印技术是将水印信息,如用户信息、版权信息等嵌入到数字载体中,使水印信息成为数据不可分离的一部分。由此来确定版权拥有者、跟踪侵权行为、所有权认证、认证数字内容来源的真实性等附加信息。数字水印技术在图像、图形、视频、音频等安全保护方面取得了许多应用成果,近几年在测绘相关领域也得到了广泛应用。
在遥感影像数字水印领域主要借助于较为成熟的数字图像数字水印技术。遥感影像与数字图像具有相似性,使得两者在数字水印研究方面存在较多的共同点。但由于遥感影像的光谱特性、物理特性和地理位置表达性等特点,遥感影像数字水印技术又具有特殊性。当前遥感影像数字水印应用以可见数字水印为主要表现形态,对不可见水印技术的研究成果并没有应用到实际生产工作中。
目前遥感影像数字水印研究虽然取得了一些研究成果,但仍存在几个方面的问题:
(1)大多数的水印算法只是将图像水印技术直接移植到遥感影像水印技术中,并未很好地考虑到遥感影像的独有特征。遥感影像类似于普通的图像,但是二者在精度要求和数据处理方式方面有着本质区别,遥感影像数字水印不仅要求水印的不可感知性,还要求数据的可用性,必须要发挥遥感影像“Picture”和“Data”两方面的作用,而不能将现有的图像水印直接应用。
(2)现有的水印技术在抵抗几何攻击方面仍然存在问题,不能真正抵抗旋转、裁剪等几何攻击以及组合攻击。通常许多算法所做的裁剪实验也只是在图像大小和像素坐标没有发生改变的情况下进行的。实际攻击中,即使对影像裁剪一小部分也会改变图像大小和像素的相对位置,这些算法都无法正确提取出水印信息。
(3)对遥感影像数字镶嵌等处理涉及拼接和色调调整等攻击的水印算法很少研究。传统的基于空域直接修改像素值或者通过修改变换域系数间接修改像素值的方法,难以解决数字镶嵌处理过程中涉及的拼接、色调调整等带来的攻击。
基于以上分析,本文以DOM的数字水印为研究对象,对于可见水印,分析当前频域DWT算法用于遥感影像可见水印嵌入时存在的问题,引入纹理复杂度概念,对DWT算法进行改进,并通过实验对算法表现进行验证。
2 算法设计
基于DWT域的数字水印算法嵌入可见水印后出现影像对比度变小、影像质量变差等问题。以DWT算法为基础,根据影像的纹理表现计算不同位置的拉伸系数α和β,提出了基于影像纹理复杂度的改进DWT可见水印算法。
2.1 DWT可见水印算法
以DWT算法为例介绍利用频域算法嵌入可见水印。首先将水印图像扩展为与原始影像相同大小的影像,原始影像和水印图像都进行DWT变换,对经过小波变换后高频和低频子带分别按下式进行计算,从而实现嵌入水印的目的。
(1)

利用DWT算法进行两组可见数字水印实验,第一组设定α(i,j)=0.90和β(i,j)=0.10,第二组设定α(i,j)=0.80和β(i,j)=0.20,实验结果如图1所示。
图1α和β取不同值时DWT算法实验结果比较
根据图1,利用DWT算法嵌入可见水印后,水印明显可见,但影像对比度变小,影像质量变差,水印图像分量的拉伸权重越大图像质量越差。其原因在于DWT算法中,水印图像的水印信息部分和背景部分都参与了水印嵌入计算,必须对主图像和水印图像同时进行拉伸,影响了主图像的细节特征和平均亮度,致使影像质量下降。由于影像对不同地物有不同的光谱响应,α和β应该随嵌入位置的不同而发生变化,在影像平坦区域应该尽可能多地保留水印图像纹理信息,在影像纹理复杂区域,尽可能多地保留载体图像的纹理特征,抑制水印图像的纹理信息。
2.2 基于纹理复杂度的改进DWT可见水印算法
为了解决上述两个问题,本文以DWT算法为基础,根据影像的纹理表现计算不同位置的拉伸系数α和β,提出了基于影像纹理复杂度的改进DWT可见水印算法。
对于小波变换的各个系数当中,低频子带是原始影像的近似,包含的纹理很少,可以按照空域亮度的掩蔽特性进行分析。同一高频子带内部高频系数从小到大分别对应了空域上的平滑区域、纹理区域、边缘区域。同一邻域内的纹理数越多,对噪声的掩蔽性就越大。为了衡量不同影像、小波分解级别、小波分解子带和不同位置对噪声的隐蔽性能,本文定义了以下变量:
定义1:位置(i,j)处纹理复杂度

(2)
式中l表示子带所在的小波分解级别,Ω是以(i,j)位置为中心的邻域,N是邻域内系数的个数。计算邻域越小越容易受到边缘的影响,若采用较大的邻域则会导致计算时间复杂度急剧增加。综合考虑鲁棒性和计算复杂度,本文选择3×3邻域。引入l的原因在于:对于同样的纹理强度而言,越是频率低的高频,频带对应的空间尺度越大,对应原始影像空间中大尺度纹理,纹理稀疏,纹理掩蔽性弱。因此对于同样大小的高频系数,其所处的频带越高,掩蔽性越大。
定义2:子带l纹理复杂度
不同子带的纹理特征是不同的,对噪声的掩蔽性也是不同的。用子带l上所有位置纹理复杂度的平均值来描述子带l的纹理复杂度,即:
(3)
式中,num(Cij)表示子带l中的系数个数。
定义3:影像平均纹理复杂度
不同影像的整体纹理复杂程度不同导致水印嵌入强度的变化范围也不一样,有的影像的整体纹理较弱,需要嵌入的强度较小,有的影像整体纹理较强,纹理较复杂,需要嵌入的强度就比较大。为了表达一幅影像的平均纹理复杂度,定义影像纹理复杂度,即:
(4)
k表示小波分解的最大级数。
根据以上定义,分别计算小波分解后低频和高频子带的拉伸系数。
对于低频子带,按照空域亮度的掩蔽特性进行计算,拉伸系数按下式计算:
(5)
βij=1-αij
(6)
式中,CL为低频系数的最低嵌入值,△CL是低频系数的嵌入强度变化范围。Cij是低频位置(i,j)位置上的系数,Cm是低频系数平均值,△CL为低频系数变化范围。αij计算完后线性拉伸至[0.95,1]范围内,则βij∈[0.0,0.05]范围内,目的是保证水印的可见性。
对于高频子带,首先根据影像平均纹理复杂度确定水印嵌入强度变化范围,再根据各个子带纹理复杂度确定每个子带的嵌入强度变化范围,最后根据同一子带内部不同位置的纹理复杂度确定不同位置的水印嵌入强度。采用的公式如下:
(7)
(8)
(9)
βij=1-αij
(10)

水印嵌入时,由于水印图像中水印信息和背景信息都参与了计算,致使影像质量下降。为了降低背景信息对嵌入水印后影像质量的影响,必须对参与水印嵌入计算的背景信息进行限制。本课题以所有水印图像三级分解高频子带系数平方和为指标提取水印图像的背景信息,凡是落在背景区域内的系数,其α调整至[0.95,1]区间范围内,β取值范围[0.0,0.05]。
(11)
根据上文介绍,总结基于纹理复杂度的改进DWT可见水印算法流程包括以下几个关键步骤。技术流程图如图2所示。
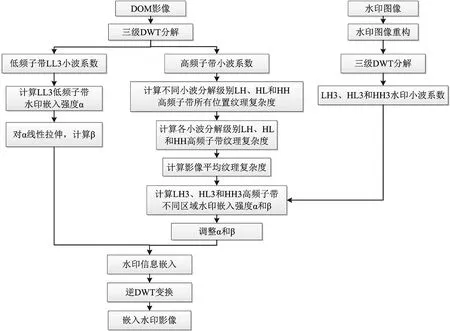
图2基于纹理复杂度的改进DWT可见水印算法流程
(1)将水印图像的大小调整到与影像一致,分别对影像和水印图像进行三级小波分解。
(2)计算影像第三级小波分解低频子带LL3水印嵌入强度α,对α线性拉伸,计算β。
(3)计算影像小波分解后各高频子段的纹理复杂度、子带纹理复杂度和影像平均纹理复杂度,得到第三级小波分解高频子段的水印嵌入强度α和β,根据水印图像小波分解得到的系数对α和β进行调整,得到最终的水印嵌入强度。
(4)嵌入水印信息,进行逆DWT变换,得到嵌入水印后的影像。
3 实验结果与分析
利用基于纹理复杂度改进DWT算法进行可见水印嵌入实验,与原始DWT算法相比,如图3、表1所示,用改进后算法嵌入可见水印强度降低,但水印仍明显可见,嵌入水印后影像的改变量相对较小,影像的均值和方差与原始影像接近,PSNR明显提高,影像信息熵含量也有改善,表现为影像质量明显改善。
需要注意的是,改进后的算法计算时间明显增长。这是由于算法在计算过程中首先要对影像进行三级小波分解,对每个级别的小波分解低频子带计算纹理复杂度、子带纹理复杂度和影像平均纹理复杂度,计算量明显增加。
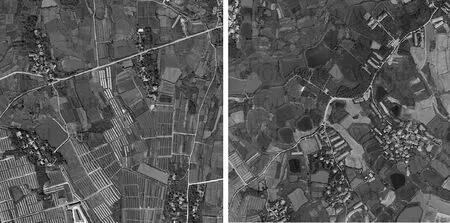
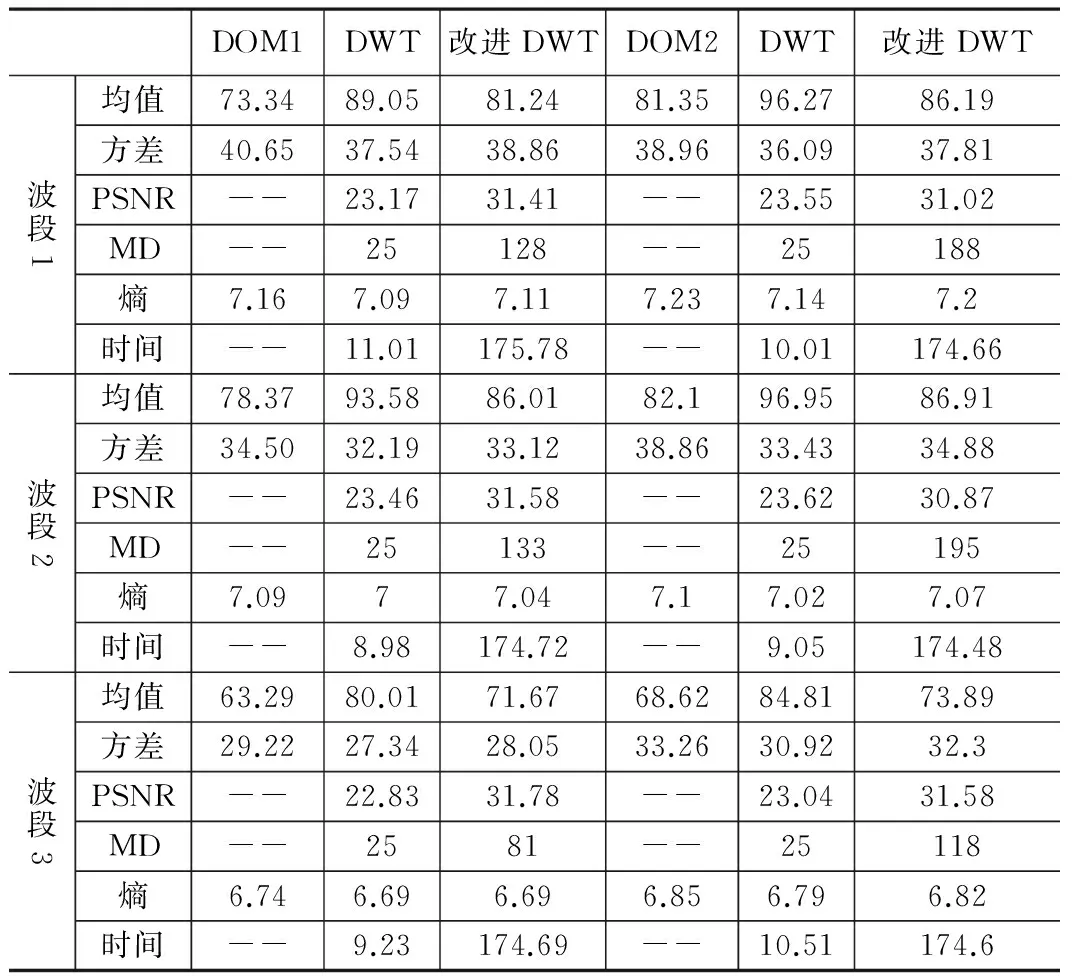
图3 DOM1和DOM2利用改进DWT算法嵌入可见水印结果 DOM1和DOM2利用DWT和改进DWT算法嵌入水印结果比较 表1
4 结 语
本文详细介绍了改进的可见水印算法研究开展的实验与实验结果分析,利用基于纹理复杂度的改进DWT可见水印算法进行DOM分幅产品嵌入可见水印,实验结果表明利用改进后的可见水印算法嵌入水印具有良好的视觉可见性,同时还有效改善了水印嵌入过程导致的影像质量下降,实验结果表明嵌入水印后影像质量较原始算法有了明显改进。
本文通过研究证明了数字水印理论和算法用于DOM的可行性,并根据实际研究成果提出了实际生产可用的数字水印算法,但仍存在一些问题,需要未来展开研究。一是根据生产需求生成多样化数字水印形态和载体类型。例如借助于二维码的容错能力,将用户信息等版权信息生成二维码嵌入遥感影像中,提高版权保护的可靠性。二是将现阶段的理论和算法研究成果转为实际生产可用的软件系统,提高算法执行效率,真正服务于遥感影像生产工作,尤其是对外提供数据服务和网上数据发布等方面。
猜你喜欢
空间电子技术(2021年4期)2021-11-10
电子制作(2019年22期)2020-01-14
电子制作(2019年20期)2019-12-04
中国惯性技术学报(2019年6期)2019-03-04
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
现代电子技术(2016年15期)2016-12-01
系统工程与电子技术(2016年2期)2016-04-16
火控雷达技术(2016年3期)2016-02-06
浙江理工大学学报(自然科学版)(2015年10期)2015-03-01
浙江大学学报(工学版)(2015年1期)2015-03-01