基于北斗的下投式空降区域探测仪设计∗
2019-02-27 08:32王晓晅解北京吴丰华
计算机与数字工程 2019年2期
王晓晅 解北京 张 芳 吴丰华
(1.中国人民解放军95857部队 孝感 432100)(2.湖北中医药大学 武汉 430000)
1 引言
空降的成功率与空降区域的气象条件和地理环境息息相关。在空降作战行动中,对空降区域空中风向、风速评估失误,将会导致伞兵偏离预定的着陆区域,以致失去空降兵快速、纵深打击能力。而对空降区域地理环境评估失误,则会导致伞兵在危险地域着陆,造成不必要的空降损耗。如果采用下投式探测仪,实时把空降区域的气象要素和地理环境探测出来,能有效提高空降兵对战场环境的快速反应能力,进而提升空降的精确性和安全性。
随着卫星导航系统的迅速发展,基于导航体制的探空仪成为今后探空技术发展的主流[1]。导航型探空仪与传统探空仪相比最大优势是风向、风速的测量精度和实时性有很大的提高。目前,基于GPS星基导航的探空测风技术在发达国家应用非常普遍[2~3],但是美国军方拥有GPS技术的所有知识产权。北斗卫星导航系统(CNSS)是我国自行研制的具有自主知识产权的全球卫星定位与通信系统,并将在2020年形成全球覆盖能力[4~5]。北斗导航卫星系统的建设,为发展我国自主的星基导航探空测风系统奠定了基础[6]。当前,研究和发展基于北斗导航系统的下投式空降着陆区探测系统的时机已经成熟,这将促使我军空降保障模式从传统的地面人工引导向空中智能引导的模式转变。
2 下投式空降着陆区探测系统设计方案
2.1 系统组成及原理
下投式空降区域探测系统主要由下投式探测仪、机载接收系统两部分组成。下投式探测仪主要由降落伞、气象传感器、北斗卫星定位测风模块、无线数字传输模块、无线图传模块、电源模块、摄像头、云台和微处理器等组成。机载接收系统由无线数字传输模块、无线图传模块、电源模块、微处理器和上位机组成。如图1所示。
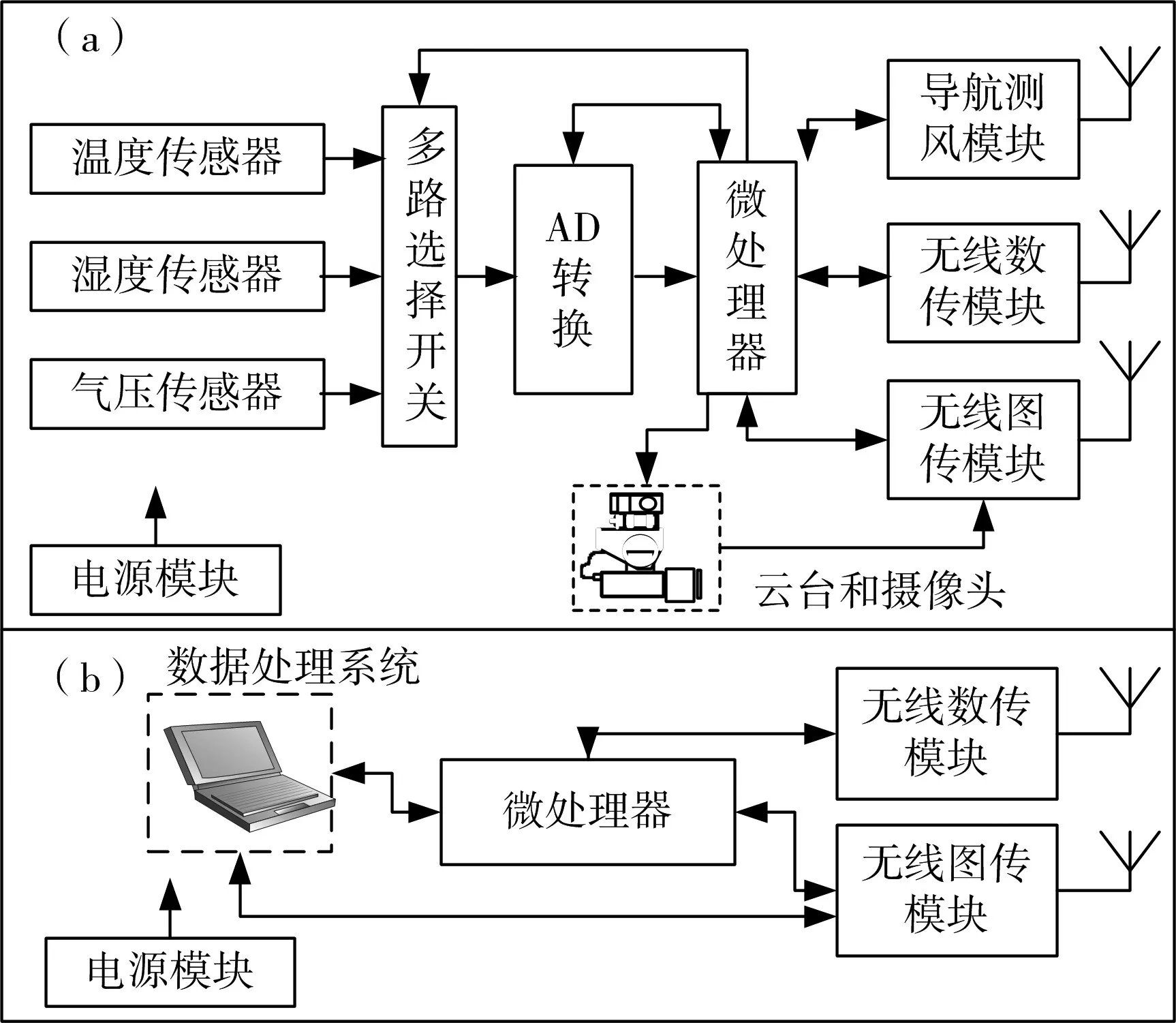
图1 下投式空降着陆区探测仪框图(a)机载接收系统框图(b)
探测仪采用伞降方式在空降区域投放后,即利用北斗接收机对探测仪进行定位,获取经纬度、高度和时间信息;利用气象传感器对大气温度、湿度、气压进行采样。微处理器将北斗定位信息和气象信息组装成帧,通过无线数字传输模块发送给空中的机载数据处理系统。同时,利用摄像头对空降区域进行高清成像,并通过无线图传模块发送给空中的机载数据处理系统。数据处理系统对接收的数据、图像进行分析处理,并将处理后的气象和地理信息传递给空降突击部队。
2.2 设计目标
根据伞降作战、训练的使用要求,提出以下性能指标。
探测高度:0~3km;垂直位置精度:10m;水平位置精度:5m;
风速测量范围:0~40m/s;风向测量范围:0~360°;风速误差≤0.5m/s,风向误差≤3°;
温度测量范围:-40°~60°;温度最大静态测量误差:0.2°;
气压测量范围:300hPa~1100 hPa;气压最大测量误差:1 hPa;
湿度测量范围:1%~100%(相对湿度);湿度最大静态测量误差:3%(相对湿度);
无线传输模块频率范围:433MHz~490MHz;最大输出功率:8W;传输距离:空旷地15km;
无线图传模块频率范围:1.2GHz;最大输出功率:13W;传输距离:通视15km;
探测仪连续工作时间:≥20min。
3 下投式空降区域探测仪的实现
3.1 控制模块设计
3.1.1 微处理器模块设计
微处理器的主要功能:一是对各类外设进行控制。通过USART接口控制导航定位测风模块CC50III-BG、无线数字传输模块、无线图传模块;通过SPI总线控制AD(模数转换器)对温度、湿度、气压进行采样;通过IO口控制云台。二是完成数据传输。微处理器将经纬度、高度、时间和气象数据按协议打包,通过无线数字传输模块发送给机载接收系统。根据性价比并结合常见探空平台的实现方案[7],本设计采用意法半导体的STM32F103增强型微处理器构成探测仪的控制核心。
3.1.2 数据传输控制规程
本设计采用面向字符的传输控制规程,使用ASCII代码集中的传输控制字符作为链路控制信息。如:SOH(报头开始);STX(正文开始);ETX(正文结束);EOT(传输结束)。下投式空降区域探测仪上报的数据帧格式为:同步头+SOH+探测时间+卫星时间+经度+纬度+高度+气温+气压+湿度+ETX+CRC,数据传送速率为每秒钟1帧。如表1所示。
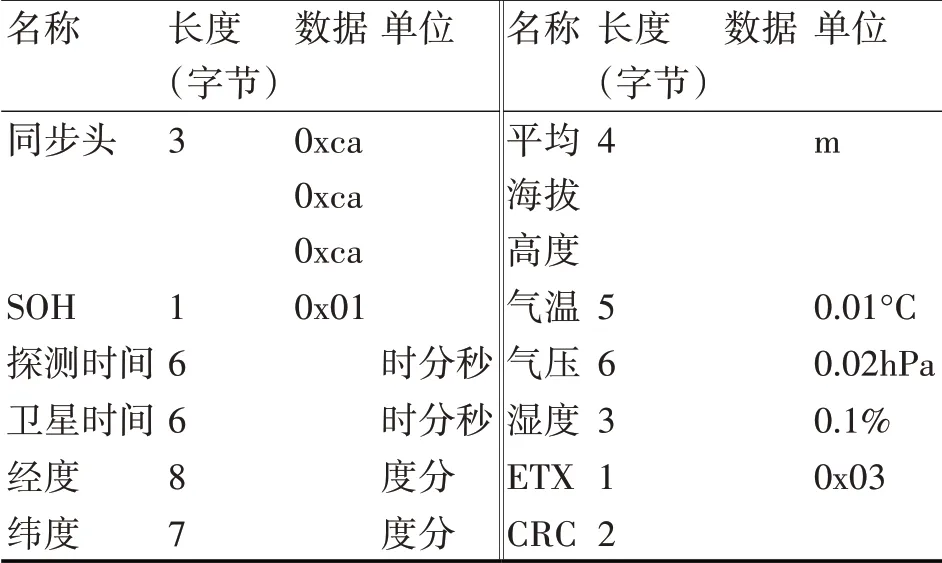
表1 探测仪上报数据格式
3.2 导航定位测风模块设计
测风是探测仪最重要的功能,测风效果决定了探测仪的性能优劣,因此测风模块功能研究和设计尤为重要。
3.2.1 导航定位测风模块硬件实现
导航定位测风模块采用基于CC50III-BG的设计。CC50III-BG是目前具有最优性价比的国产化北斗/GPS双系统高精度导航模块,广泛应用于北斗地基增强系统、车辆监控/导航、气象探空和授时等应用领域。其水平定位精度为5m,垂直定位精度为10m,测速精度为0.1m/s。测风模块参考设计如图2所示。
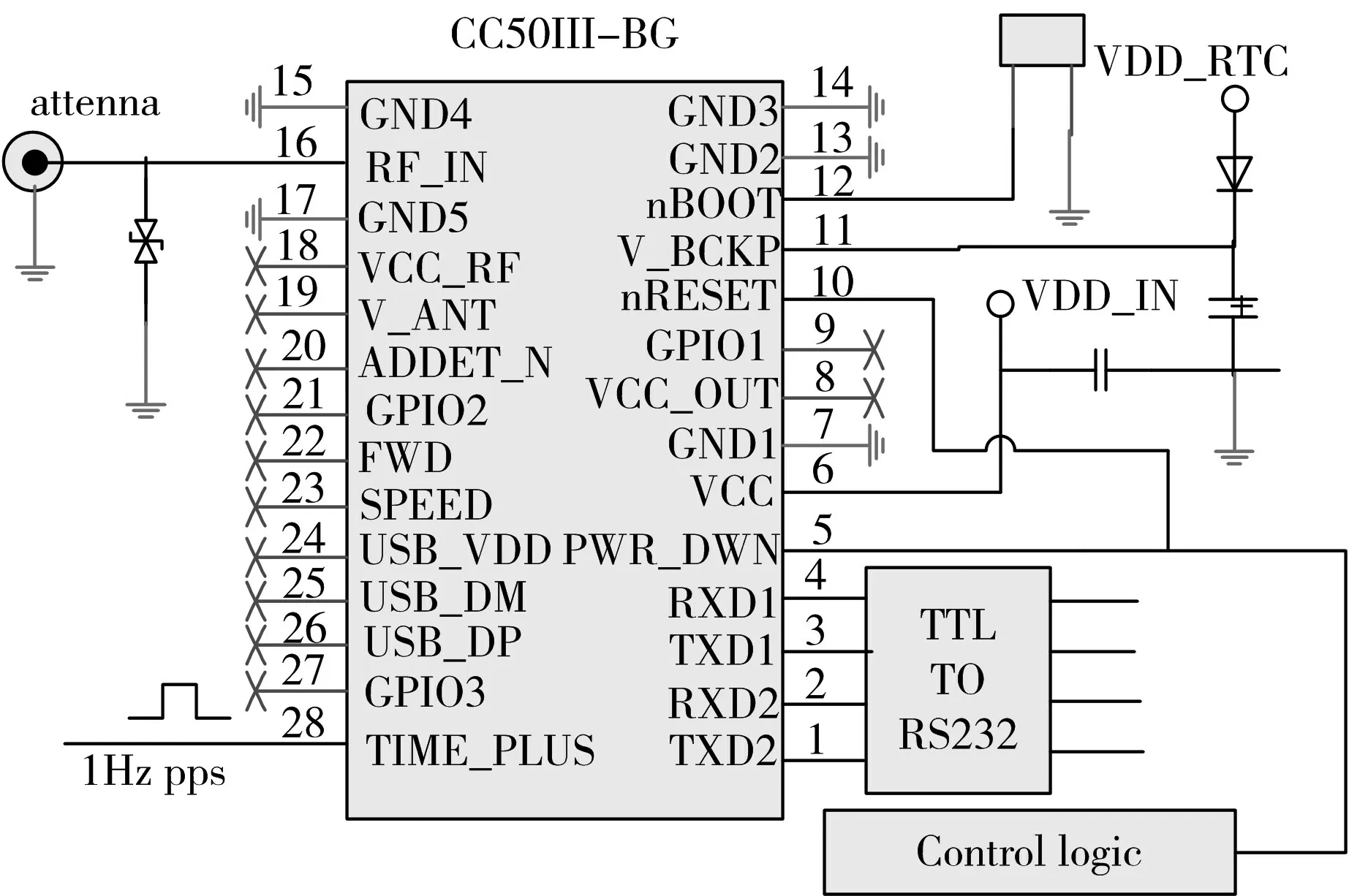
图2 测风模块参考设计
上图中控制逻辑由STM32F103的IO口提供,1Hz时间脉冲信号由STM32F103的定时器提供。TXD1、RXD1与STM32F103的UART1连接,提供串口通信。
3.2.2 风速的计算
北斗导航模块CC50III-BG可同时接收北斗和GPS信号,可以采用1)单北斗信号解算;2)单GPS信号解算;3)北斗和GPS信号混合解算等三种模式定位测速。本文采用混合解算模式,可以有效提高定位和测速的精度。利用卫星导航系统测速的方法有测距定位法和多普勒频移法两种[8~9]。其中,多普勒法所获取的风速是瞬时值,受探测仪摆动影响波动较大,所以本文采用导航测风,可以有效平滑瞬时误差。
探测仪抛出稳定后,下降速度约为6m/s~10m/s,系统采样间隔为1s,期间探测仪下降约6m~10m。可以认为在6m~10m的气层厚度内,水平气流的速度保持不变,测出的风速即为真实风速,称之为真风。设探测仪在高度hi的坐标为(xi,yi),时间为ti,在高度hi-1的坐标为(xi-1,yi-1),时间为ti-1。则在第i层(高度Hi=(hi+hi-1)2)的风速和风向为

对于由降落伞携带的探测仪,不能忽略降落伞系统的惯性,系统在垂直方向的下降速度有加速度,因此不能直接把系统在水平方向的运动作为水平气流的流动。两高度间的层间合成风,可由之间若干层真风矢量的矢量和得到。由于各真风层厚度不同,对合成风贡献也不同,可以根据各真风层占两高度间气层总厚度的比例,对各层真风矢量进行加权。加权后各层真风公式如下:
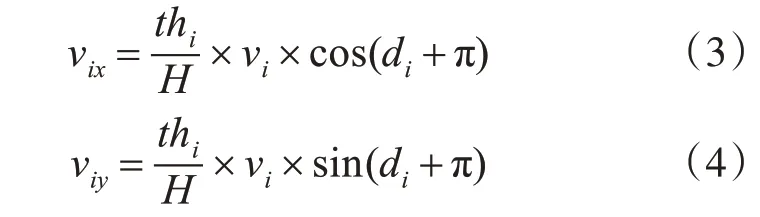
式中thi是第i真风层厚度,H为两高度间气层总厚度,vix、viy是第i真风层对合成风矢量在x、y方向的贡献。
两高度间的层间合成风公式如下:
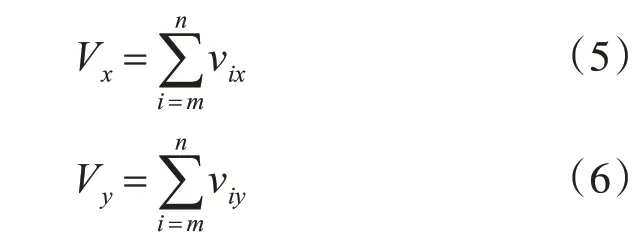
式中Vx、Vy为合成风矢量在x、y轴上的分量,m、n为起始真风层和终止真风层。
3.3 气象传感器电路设计
传感器电路主要由模数转换器和温度、湿度、气压传感器以及信号调理电路组成,如图3所示。传感器的选择:1)温度传感器型号为PF1,属于线绕式铂电阻,温度测量范围为-80℃~+180℃;2)气压传感器型号为MPM180,属于压阻式压力敏感元件;3)湿度传感器型号为SHT15,具有反应时间快,敏感度高等优点。模数转换器AD7794具有功耗低和完全模拟输入终端,可用在低频信号的测量中,集成了多路复用器和串行外围接口(SPI)等,非常适合多通道的应用。
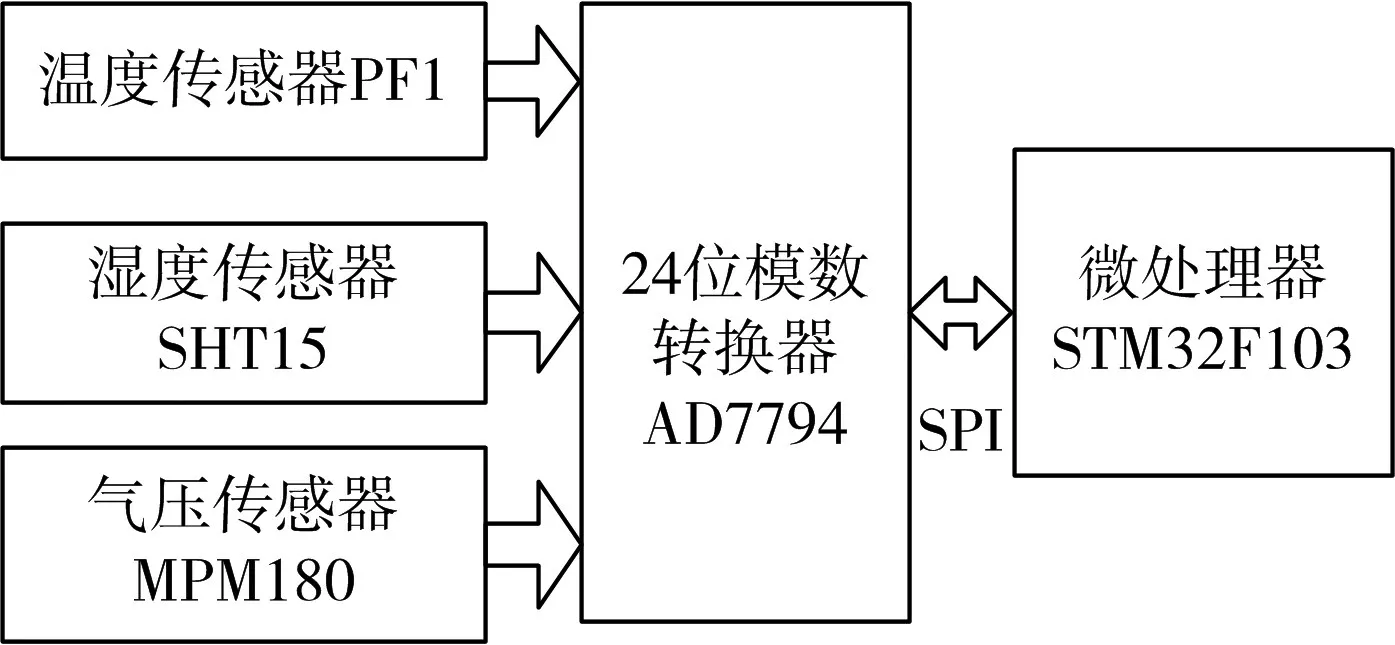
图3 传感器电路框图
3.4 无线图传发送模块设计
编码正交频分复用技术是信道编码技术和OFDM技术的结合,由于加入信道编码,该技术具有强大的纠错功能,提高了抗多径衰落和抗多谱勒频移的能力[10~11]。由于本设计的接收部分位于高速运动的飞机上,采用COFDM技术可有效克服谱勒频移影响。
无线图传发送模块采用“DSP+正交DAC”的设计思路,如图4所示。视频数据经过RS纠错编码、频域交织、3/4码率的TCM-16QAM编码、快速傅里叶反变换(IFFT)、插入保护间隔等过程,最后通过正交调制器实现数字上变频,从而完成COFDM调制。D/A变换之前的工作全部由DSP通过软件编程实现,DSP选择TI公司的TMS320C6748浮点处理器。正交调制器采用AD9957实现,DSP输出的I、Q两路信号经过内插、抽取、滤波、混频、DA等过程,调制为中频信号。中频信号通过混频上变频到射频频段,然后经过滤波和功率放大就可以发射出去了。

图4 无线图传发送模块框图
3.5 无线数字传输模块设计
无线数字传输模块采用“单片机+无线收发芯片”的设计思路,如图4所示。主控芯片采用C8051F930单片机,RF芯片采用Si4432无线收发芯片。Si4432内部集成了数字调制解调器,发送和接收FIFO、功率放大器、分集式天线等,所以只需要很少的外部原件就可以构建一个高性能的无线收发系统。Si443不加功率放大器时的最大输出功率就可达+20dBm,提供的双天线设计和内部集成算法能使有效发射距离提高50%以上,为了进一步提升通信距离,外加了M57704M功放模块,使发射功率提高到8W~13W,有效的满足了远距离通信需求。RS232串口提供了简单易用的操作接口,探测仪控制模块按规定的通信协议,通过串口就可以很方便地发送、接收数据和对无线数字传输模块进行控制。对探测仪控制模块来说,无线数字传输模块就是一个透明无线数据收发单元。
4 结语
空降是一种传统投送方式,在与先进制导技术和自动控制技术结合后,投送距离、精度和灵活性都有了极大提高,其军事应用也今非昔比[12]。欧美发达国家的防务公司在空降空投保障方面进行了大量的研究,研制出了一批多用途、自动化、高精度的保障系统,包括下投式探空仪、制导空投系统等[13~14]。这些系统基本都是基于GPS卫星导航体制工作的。我国在这方面进展不足,特别是在装备研制方面还处于起步阶段。发展基于北斗导航体制的空降空投保障装备,摆脱对GPS系统的依赖,是提升我军空降空投能力的现实需求。本文给出的基于北斗导航的下投式空降区域探测仪的设计方案,经初步验证具有良好的可行性和实用性。
猜你喜欢
农业灾害研究(2022年9期)2022-11-19
农业技术与装备(2022年5期)2022-07-25
小哥白尼(神奇星球)(2022年3期)2022-06-06
杂文月刊(选刊版)(2020年4期)2020-05-20
环球时报(2020-03-04)2020-03-04
当代陕西(2019年18期)2019-10-17
现代农业科技(2018年11期)2018-08-14
环球时报(2017-06-07)2017-06-07
中学生数理化·八年级数学人教版(2016年4期)2016-08-23
太空探索(2016年12期)2016-07-18