一种单频载波中插入线性调频信号的水声遥控技术∗
2019-02-27 08:31白仲鑫张效民
计算机与数字工程 2019年2期
白仲鑫 张效民 郑 凯
(西北工业大学航海学院 西安 710072)
1 引言
远程水声遥控是利用声波实现遥控命令传递的一种单工水声通信技术,该技术被广泛应用于水声释放器[1]、石油开发[2]、水雷遥控[3]及无人航行器的远程控制等民用和军事领域。
对于通信系统而言必须同时满足可靠性和有效性两个应用要求,但是由香农公式[4]可知这两者是一对矛盾体,在实际应用中通常根据应用场景及应用要求选取折中方案。对于远程遥控而言,首先必须具备极强的可靠性,因为一旦遥控目标发生错误动作可能会造成巨大的经济损失、甚至引发致命的灾难,一般水声遥控系统的误码率达到10-5~10-6左右才能满足应用要求,这远高于一般水声通信系统对误码率的要求。此外,由于遥控指令的数据量不大对遥控系统的有效性要求较小,因此通信速率可以很低。
在军事应用上,为了避免敌方发现,遥控的隐蔽性也变得越来越重要。另外,随着人类对海洋开发活动的日益增加,人为的水下高强度的噪声会导致海洋动物听觉缺失,甚至死亡[5~6],因此水声遥控还应尽量避免对海洋生物产生强的单频噪声干扰。由于扩频通信可将频谱展宽实现低信噪比隐蔽传输,因此得到了广泛的研究,但是扩频通信需要进行复杂的扩频同步等工作,导致接收机结构十分复杂。在远程遥控系统中受接收设备体积、功耗等的限制,通信算法应较为简单且易于实现。
出于低算法复杂度以便工程实现、高抗噪声性能以实现远程可靠传输以及展宽频谱以利于系统隐蔽和降低噪声干扰等三点考虑,本文以鲁棒性较好的BFSK载波调制技术为基础,提出了一种周期性插入线性调频信号的遥控指令产生方案,实现了频谱展宽。在接收端利用正交解调进行解码,并采用了Turbo信道编码技术进一步保证了系统的抗噪声性能。
2 遥控发送信号产生算法
尽管PSK调制的抗噪声性能比FSK调制的抗噪声性能好,但是远程水声信道中由于水面反射、海底反射、不均匀介质的散射等原因会引起载波相位的快速跳变,导致PSK信号解调时获取同步载波信息比较难,此外,载有信息的信号经水声信道传输后会产生严重的相位畸变,即便能够精确地获得同步载波,但是由于传递信息的相位发生了畸变所以解调的结果中会存在严重的错误。出于频谱展宽的目的并考虑到遥控系统对鲁棒性的要求,本文在鲁棒性较好的BFSK调制的基础上提出了周期插入线性调频信号的遥控信号的产生方案。假遥控信号的符号周期为T,首先用脉宽为Tc的方波对遥控信号调制,如图1所示:
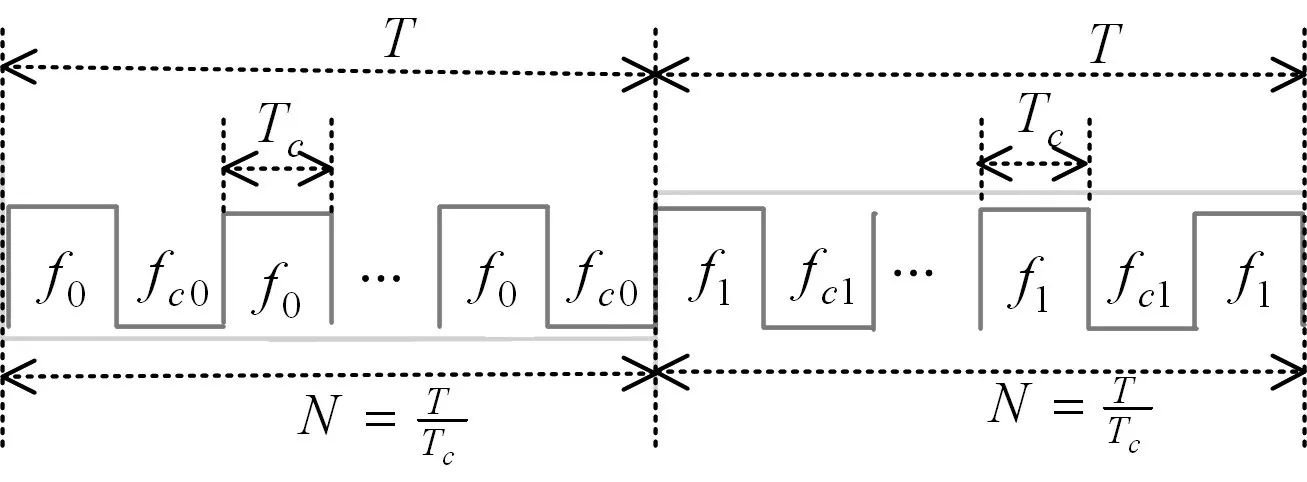
图1 遥控信号结构
图1中f0为单频信号y=sin(2πf0t),表示发送信息“0”;同理f1为单频信号y=sin(2πf1t)表示发送信息“1”。fc0和fc1均为周期性插入的线性调频信号,且频率分别在fc0∈[fL0,fH0]和fc1∈[fL1,fH1]之间。为了实现正交解调,两个单频载波信号必须正交,任意初始相位的两个正弦信号的正交条件为[7]

当m=1时得最小频率间隔f0-f1=1/Ts(Ts为正弦信号的持续时间)。此外,为了保证发射换能器正常工作,载波调制信号还应满足相位连续的条件,对于f0和f1本文选择一种特殊情况,使得单频载波信号在Tc间隔内恰好包含整数个周期,即

假设线性调频信号的初值为fout且调频斜率为k,则周期插入的线性调频信号为

为了满足频率区间约束,在Tc间隔内有

式(4)中对应信息“0”和“1”,Δfmax分别为Δfmax=max{|fL0-fout|,|fH0-fout|}和Δfmax=max{|fL1-fout|,|fH1-fout|}。并且k的符号由Δfmax的取值确定,当取值为|fL0-fout|或|fL1-fout|时k为负;反之,当Δfmax为|fL0-fout|或|fL1-fout|时k为正。
由于单频信号y=sin(2πf0t)和y=sin(2πf1t)在Tc间隔内恰好包含整数个周期,因此为了满足连续相位约束,线性调频信号在Tc间隔内的截止相位应为π的整数倍,即

因此调频斜率k为

将式(6)带入式(4)可得:

当调频斜率k>0时m取满足式(7)的最大整数值,反之取最小整数值。因此Tc间隔内线性调频信号的产生步骤为
1)在fc0∈[fL0,fH0]或fc1∈[fL1,fH1]之间随机选择初始频率fout;
2)计算调频宽度Δfmax以及判断调频斜率k的正负;
3)根据式(6)及k值正负计算满足约束条件的整数值m;
4)将m、fout和Tc代入式(5)计算调频斜率k;5)将fout和k代入式(1)生成线性调频信号。
3 遥控信号的正交解调
出于解码算法的鲁棒性考虑,本文利用BFSK信号的正交解调方法,对遥控信号进行解调,解调方案如图2所示。
图2中首先将接收的信号经过一个中心频率在(f0+f1)/2带通滤波器将周期插入的线性调频信号滤除,然后进行正交解调。解调时采用同相信道I和正交信道Q对滤波器后的遥控信号进行非相干解调,其中上两条支路是用来检测频率为f0的单频信号,下两条支路用来检测频率为f1的单频信号。
当发送信息“0”时,接收信号经过带通滤波后变为

式(8)中γ为接收信号的幅度,an=1 0 1 0 …,p(t-nTc)为宽度为Tc的方波脉冲即∑nanp(t-nTc)表示周期性方波,φ0为接收信号的初始相位,n(t)为加性噪声。当相位φ0=0时,接收信号与第一个支路信号相关,与其他三个支路正交;当接收信号为φ0≠0时,接收信号与前两个支路部分相关,与后两条支路正交。当发送信息“1”时,接收信号经过带通滤波器后有类似的情况。
理论上接收信号经过带通滤波器滤除周期插入的线性调频信号后会损失一半能量,因此相比传统的BFSK信号的正交解调该方案会有-3db的性能损失。即该方案以-3db的损失来换取发送信号的频谱展宽并且在接收端避免复杂的扩频同步工作。为了弥补性能损失,本文进一步研究了Turbo信道编码技术来提升该方案的抗噪声性能。
4 Turbo信道编码
本文的Turbo信道编码方案采用常用的Turbo码的并行级联结构,如图3所示。
编码时二进制序列u首先经过交织器产生交织信息序列u˜,然后分别将u和u˜经过分量编码器1和分量编码器2产生监督序列x1p和x2p,最后经过删余和复接产生编码后的信息序列c,然后经过载波调制可发送进入信道。译码时本文采用文献[7]的迭代译码算法。
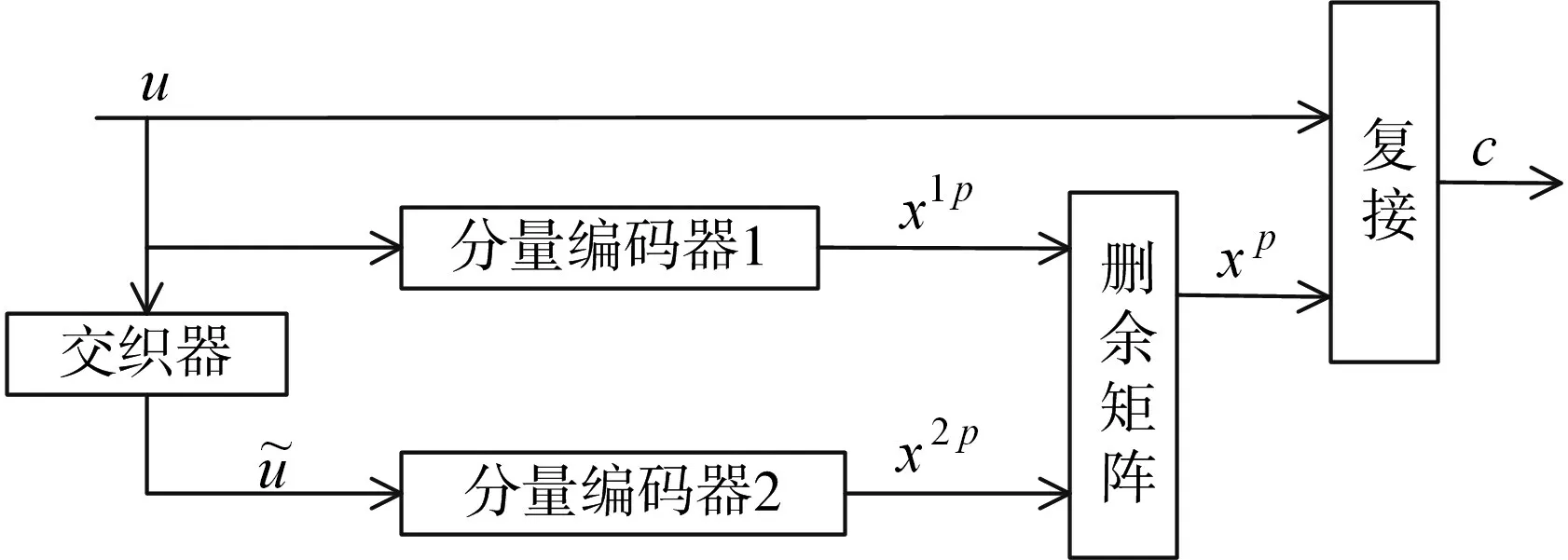
图3 并行级联Turbo码的编码结构
在前面分析的基础上,结合发送基带信号调制、信道编码、正交解调以及信道译码,可得本文的整个发送与接收的遥控方案框图,如图4所示。
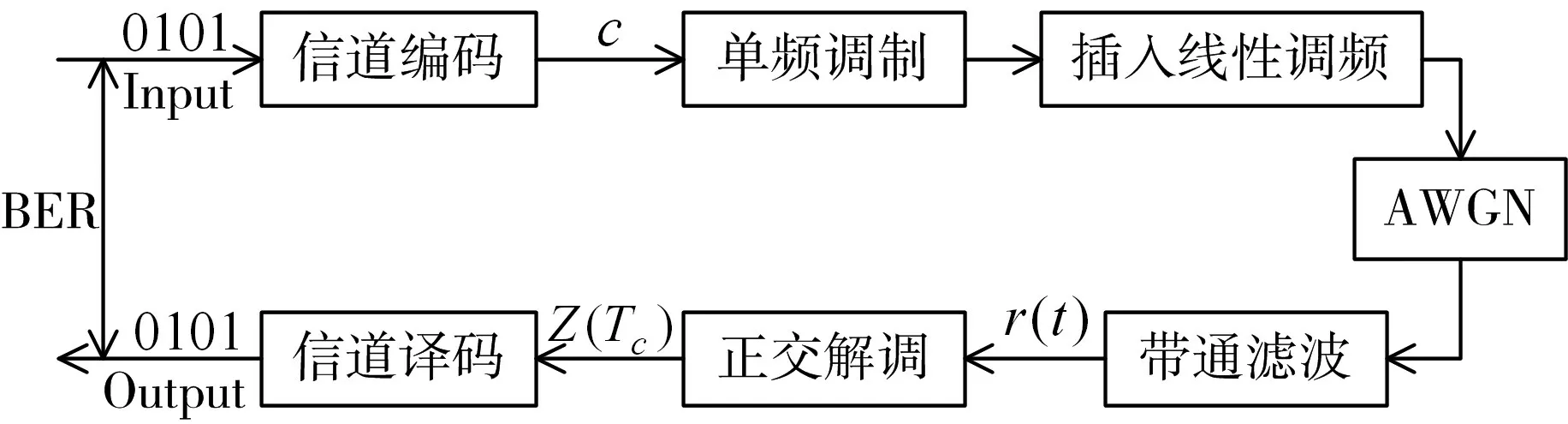
图4 远程遥控方案
图4中,在发送端,首先将要发送的二进制信息经过信道编码产生编码信息序列c,然后根据图1方案进行载波调制,最后将产生的遥控信号后发送。在接收端,接收信号首先经过中心频率为(f0+f1)/2的带通滤波器滤除线性调频信号产生r(t),然后将r(t)进行正交解调,最后将正交解调的输出Z(Tc)作为解码软信息输入信道译码部分进行迭代译码[7]。
5 性能仿真
假设T=1s,Tc=25ms,f0=1700Hz,f1=1800Hz,fL0=1550Hz,fH0=1600Hz,fL1=1900Hz,fH1=1950Hz,采样率fs=10000Hz。本文方案产生的遥控信号的频谱和BFSK信号的频谱如图5所示。
由图5仿真结果可知与传统的BFSK信号的频谱相比,本文提出的方案产生的遥控信号具有一定的频谱扩展能力。一方面,降低了f0和f1处信号的幅度进而降低了被截获的概率,并且在不知道载波频率信息的前提下,其他频点处的信号会对敌方产生一定程度的干扰,从而降低截获概率。另一方面,将频谱展宽,可减轻对海洋动物产生强烈的单频刺激性噪声干扰,以免威胁到其生命。
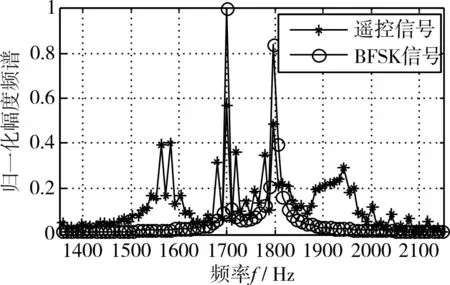
图5 遥控信号和BFSK信号频谱对比
下面对本文提出遥控方案的误码性能进行仿真分析,BFSK信号在高斯白噪声信道中非相干解调的理论误码率公式为[8]

式(9)中EbN0=10lg(r),本文仿真条件下BFSK调制的理论误码率曲线在不同信噪比间的转换条件为

由于Tsym=1,Tsamp=1/fs=10000,因此BFSK调制非相干解调的理论误码率公式为

当Turbo信道编码帧长为N=100,编码速率rate=1/3时,图4所示遥控方案的仿真误码率曲线和式(11)的BFSK理论误码率曲线如图6所示。
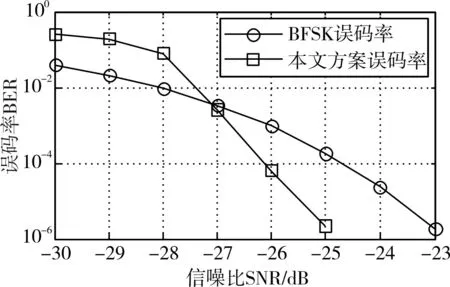
图6 误码率曲线对比图
由图6可知,本文提出的遥控方案相比BFSK的非相干解调会有2dB的性能提升。尽管在遥控信号正交解调时会浪费一半的信号能量,理论上相比BFSK的非相干解调会有-3dB的性能损失,但是经过Turbo信道编码不但弥补了-3dB的性能损失还提升了约2dB的性能。图6进一步表明在-25dB时误码率可达到约10-6便可满足远程水声遥控的应用要求,因此图6的仿真结果证明了本文提出方案的有效性。
6 结语
根据线性调频扩频原理,本文提出了一种在BFSK载波调制中周期插入线性调频信号的遥控发送信号产生方案。该方案与传统的BFSK调制相比具备频谱展宽能力,与直接序列扩频相比无需复杂的扩频同步,增加了算法的鲁棒性。仿真结果表明本文的遥控方案具有良好的频谱展宽能力,因此具备一定程度的抗截获性能并且可减轻对海洋动物产生强烈的单频噪声干扰,此外相比BFSK理论误码率曲线会有约2db的性能提升。
猜你喜欢
发电设备(2022年3期)2022-05-23
雷达与对抗(2022年1期)2022-03-31
发电设备(2022年1期)2022-01-20
中国空间科学技术(2021年1期)2021-03-16
科技传播(2019年24期)2019-06-15
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20
现代电子技术(2016年22期)2016-12-26
移动通信(2016年20期)2016-12-10
人间(2016年28期)2016-11-10