基于三维有限元的混合励磁爪极电机仿真研究
2019-02-25 02:09姚舜才王晓丹
微特电机 2019年1期
杜 飞,姚舜才,王晓丹,安 坤
(中北大学,太原 030051)
0 引 言
爪极电机由于转子部分做成鸟爪状,磁极相互交错形成而得名。由于其结构相对简单,制造成本低廉,被广泛应用于各种场合,尤其是运用于汽车发电机时,更具有优势[1]。随着现代汽车工业的发展,汽车上配备的电子产品增多,但是汽车电池容量没有明显增强[2],如何获得高效率电机是现代车用发电机的一个关键性问题。
常用的爪极发电机有两种励磁方式:电励磁和永磁励磁。电励磁在两爪极的轭部放置一个励磁线圈形成励磁磁场将两爪极磁化为N,S两极。电励磁爪极电机制造成本较低,磁场易调节,但同时故障率高,损耗较大[3]。永磁爪极电机一般两爪极采用相同永磁材料,但磁化为不同磁极,此类电机结构简单,能提高电机功率密度,但磁场稳定难调,灭磁困难[4]。
使用混合励磁方式是爪极电机研究的一个重点方向,根据永磁体安放的位置不同,可以实现不同的混合励磁方式。在爪极电机的两爪极交错的空隙之间放入切向充磁的永磁体,可以实现并联混合励磁[5],永磁体的安放主要解决,爪极电机极间漏磁现象。爪极电机轭部与励磁线圈之间增加轴向充磁的永磁体,可以实现串联方式的混合励磁[6],永磁体的安放主要解决气隙磁场的调节。另外,还有一种在爪极电机磁极根部放入轴向充磁的永磁体,形成并联混合励磁[7],永磁体的安放主要提高了爪极电机端部空间的利用率。
本文研究一种新型并联混合励磁方式,介绍了新型并联混合励磁的励磁原理与结构特点,使用Ansoft软件,运用三维有限元法对新型爪极电机进行了建模和电磁仿真。结果表明,采用新型并联混合励磁方式,在相同励磁电流条件下,能够获得更高的磁场性能,提高了爪极电机的电枢电流,并且可以实现爪极电机气隙磁场的调节。
1 新型爪极电机混合励磁原理
新型混合励磁爪极电机主要由定子、两爪极、永磁体环、电励磁线圈和转轴等部件组成。在爪极轭部空间放置电励磁磁环实现电励磁。在两爪极轭部中间放置一块永磁体环,与中心轴线成对称结构。永磁体环的充磁方向与电励磁产生的磁场方向一致。
励磁磁环通入一定电流后,电机的磁场由电流励磁磁场和永磁体磁场进行并联叠加,形成混合励磁磁路,主磁路首先由永磁体所处的N极方向,经过爪极轭部和爪极部分,进入电机气隙部分。之后绕经定子、定子齿部再次进入气隙,然后进入相邻爪极、爪极轭部,最终回到永磁体S极。另外,电励磁产生的磁路与主磁路重合,不同的是,爪极轭部因为永磁体环的存在,电励磁磁路经过中间轭部时要穿过永磁体环,其磁路模型如图1所示。
当励磁磁环不通入电流时,永磁体可以实现单独作用,整个电机的磁路全部由永磁励磁磁场提供,磁场大小和永磁体的性能、尺寸有关。此时爪极电机可以实现自励。

图1 新型混合励磁爪极电机磁路模型
通过对新型混合励磁爪极电机的磁路分析,可以得出,与传统爪极电机相比,当实现混合励磁时,磁场可以产生叠加效应,通入相同励磁电流可以获得更大的磁场强度;同时也可以根据电机实际需要进行磁场调节,特别是在电机高速运行时可以进行弱磁控制。
2 有限元下的爪极电机模型
由于爪极电机两爪极尖部和根部的极弧系数和厚度不一致,加上爪极电机的两极交错排布,在建立爪极电机的模型时,二维模型已经不能代表爪极电机的实际结构[8],因此,对爪极电机的建模采用三维建模方式。同时,三维建模的方式也能提高爪极电机仿真结果的精度,所求解的结果比二维模型更为准确[9-10]。
目前,对电机电磁场方面的研究采用Ansoft Maxwell软件,但Maxwell在三维建模方面存在不少问题,对于电机曲面的处理能力较弱[11],特别是在处理爪极电机转子爪极方面,已经不能满足需求。因此,为了更准确建立起爪极电机的模型,采用专业绘图软件Solidworks对爪极电机的转子部分进行建模,而后导入Maxwell;定子、定子绕组、励磁绕组、转轴和永磁体部分选择在Maxwell中一体建模。最终将两部分模型进行整合,形成完整的爪极电机模型。新型混合励磁爪极电机的主要参数如表1所示。
表1 新型混合励磁爪极电机主要参数
爪极电机由于结构的特殊性,其模型复杂,而且研究电磁性能时只能采用三维模型,因此运算时间较长。为简化模型,根据新型混合励磁爪极电机结构,建立等效六分之一模型进行研究,具体模型结构如图2所示。相比于传统爪极电机,新型混合励磁爪极电机在爪极轭部增加圆环形状永磁体,充磁方向与励磁磁场方向相同,通过混合励磁,在不改变磁场大小情况下减小励磁电流,从而减少励磁损耗,提高效率。
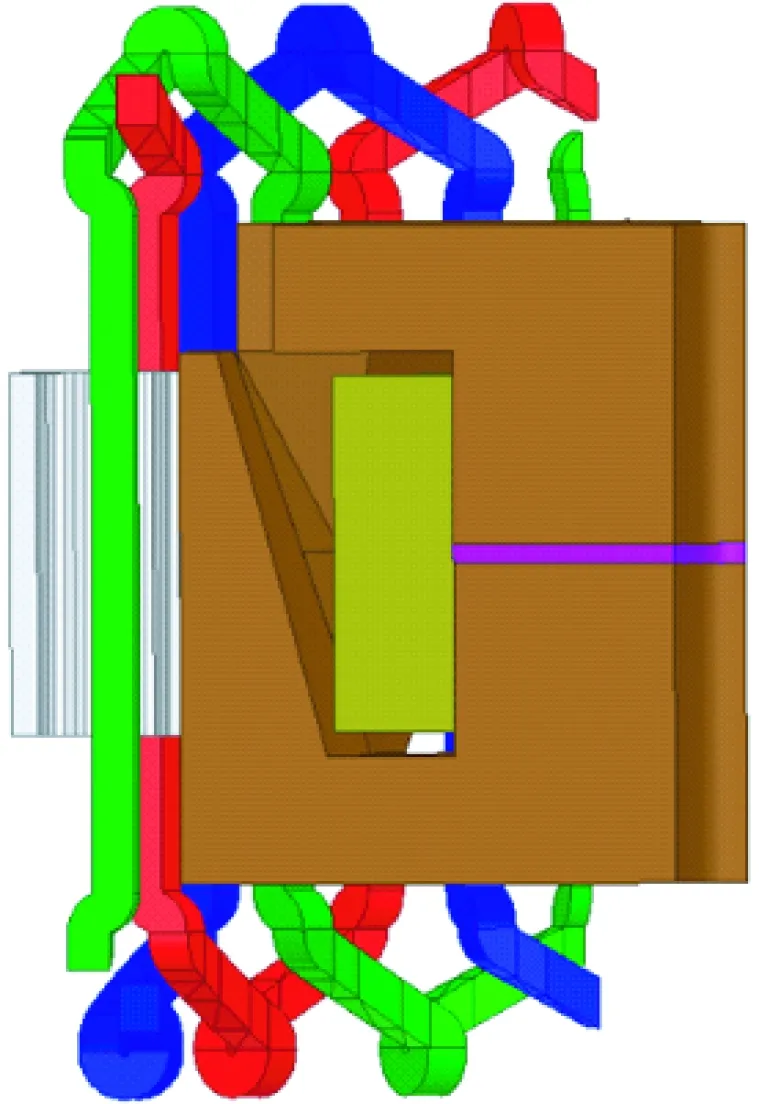
图2 六分之一电机模型
网格划分是进行有限元分析的前提,网格的质量和网格剖分的类型决定有限元计算的精度。一般来说,高质量的离散网格,不仅要求有足够多的节点数,同时还必须保证单元网格大小的合理性在使用Maxwell对电机进行电磁场仿真时,剖分网格的稀疏直接关系到最终求解的准确性,同时影响整个仿真时间,因此合理进行网格划分是进行有限元分析的重要步骤[12]。
Ansoft有独立自主的网格剖分,可以不需要重新设置。软件本身自带的网格剖分有三种设置方式:On Selection设置主要作用在剖分模型的边界上;Inside Selection设置主要作用在模型边界层附近,针对模型内部;Surface Approximation设置主要针对边界是曲线的模型进行剖分[13]。
由于爪极电机所建的模型为部分模型,边界条件复杂,因此,在进行网格剖分时,不仅要使用软件本身的剖分设置,在一些主要界面,特别是主磁路经过不同材料的交界面时,需要手动设置剖分,进行网格细化。最终得到的网格剖分如图3所示。
由图3可知,在主要的接触位置,将永磁体与爪极,爪极与气隙,定子与气隙之间进行了细化工作。其中转子部分共剖分5 581个单元,定子部分共剖分10 893个单元。

图3 电机网格剖分图
3 性能仿真结果分析
3.1 新型混合励磁爪极电机性能分析
新型爪极电机由于结构上的变化,因此对电机的仿真研究尤其重要,其中作为发电机时其额定状态的仿真研究尤为重要[14]。因此,图4给出了新型爪极电机在额定转速3 000 r/min,励磁电流5.4 A时的定子和转子的磁力线云图。

(a) 新型电机转子

(b) 新型电机定子
由磁力线云图可以得出,在转子上,由于新型爪极电机存在轭部永磁体,因此新型爪极电机磁力线密集部分集中在爪极的表面和永磁体附近的爪极轭部,在定子上,磁力线经过定子齿向定子轭部两边绕经定子齿回到气隙。此外,作为发电机,电机的电枢电流、转矩和磁链是重要的指标,图5分别给出新型爪极电机的三相电流波形、转矩波形和三相磁链波形。
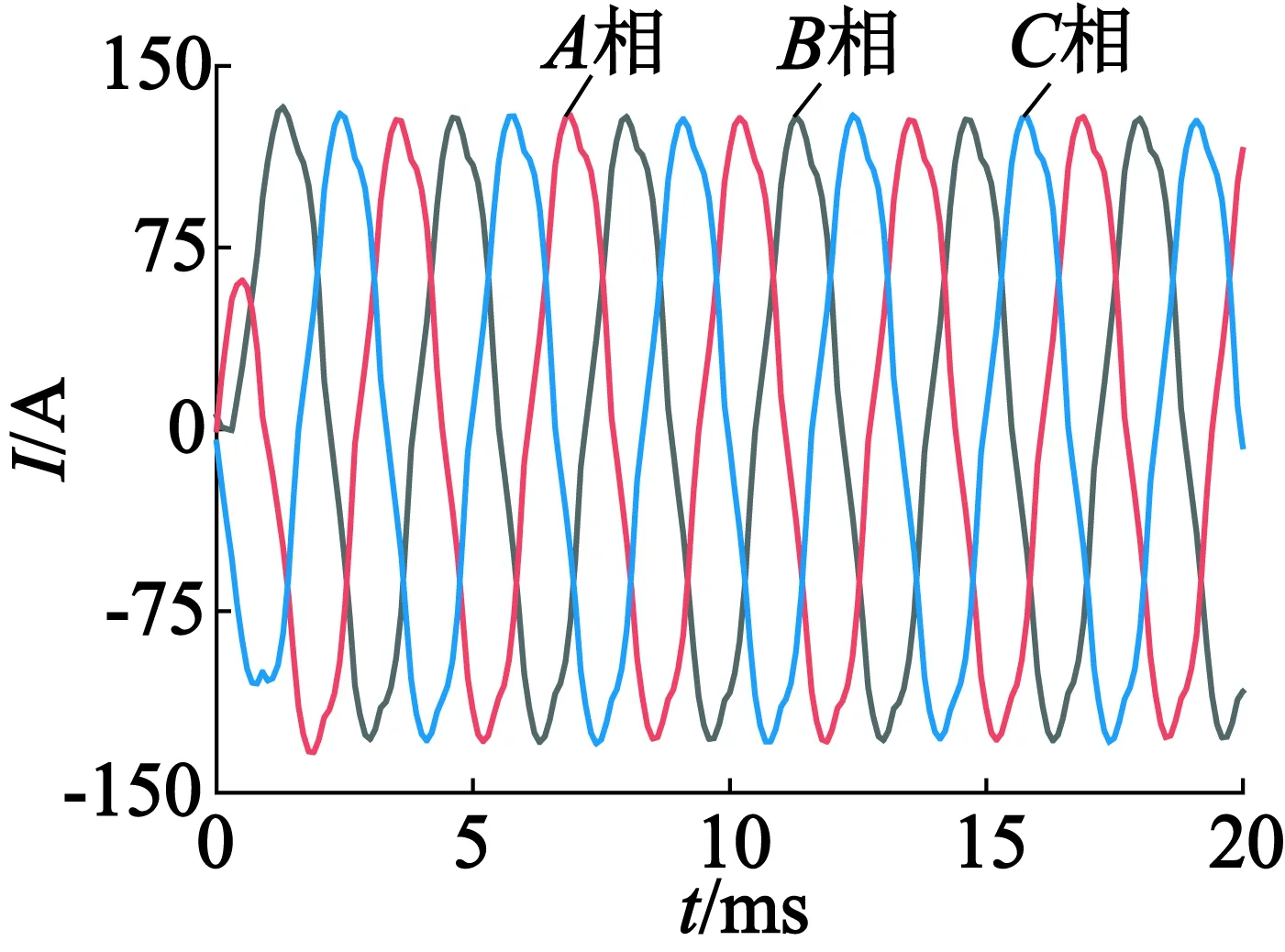
(a) 三相电枢电流波形

(b) 转矩波形
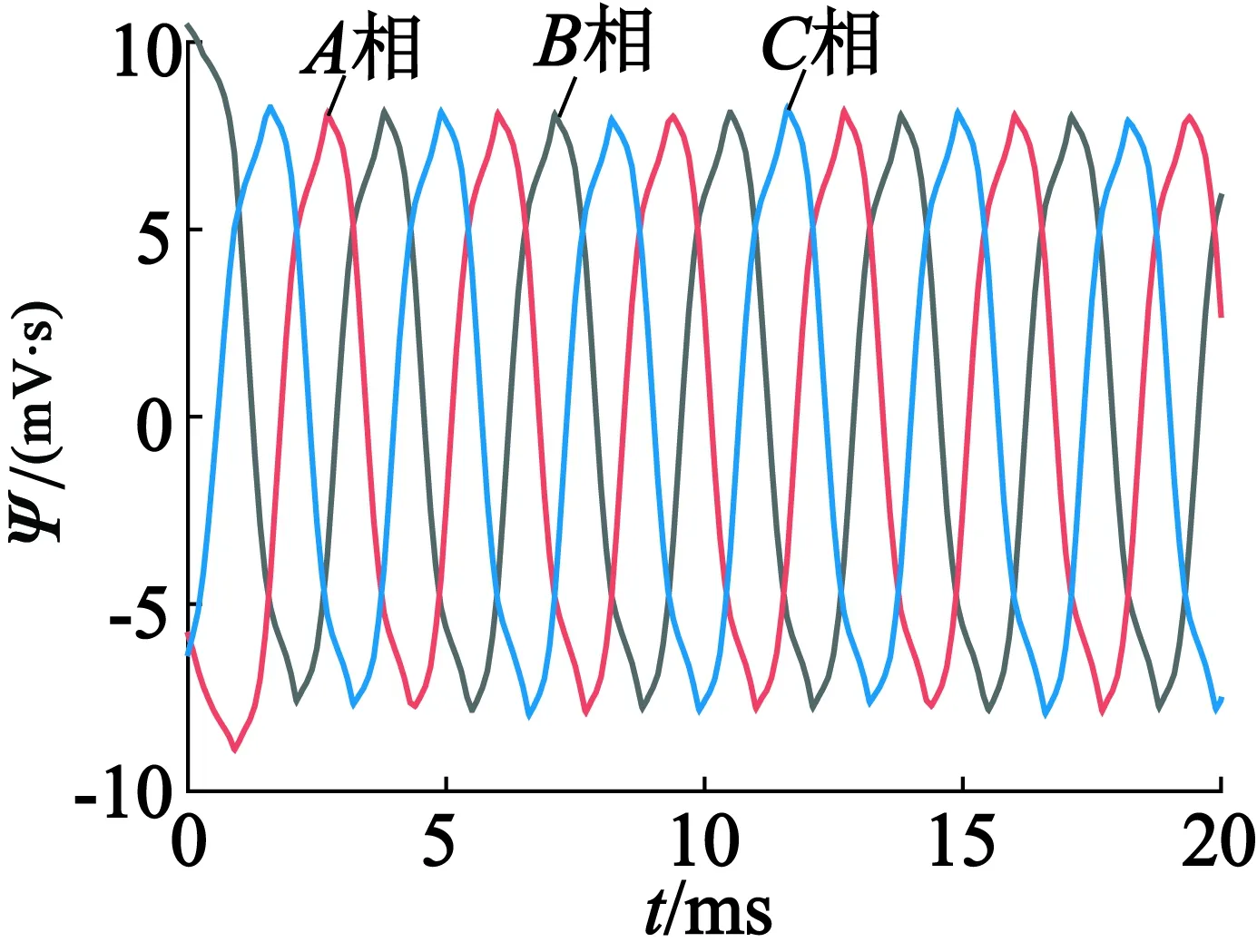
(c) 三相磁链波形
由图5可以得出,在发电机额定状态下,电机的电枢电流为99.57 A,磁链峰峰值为17.83 mV·s,由于爪极电机为发电机状态,因此爪极电机的平均转矩为-11.13 N·m,转矩脉动为1.14 N·m。电机具有比较好的特性。
3.2 新型混合励磁与传统电励磁对比
新型混合励磁爪极电机由于在转子轭部增加了永磁体与原来电励磁形成串联混合励磁,相比传统电励磁,增加了主磁路的磁通密度,使得整体磁密增大。电机转速在3 000 r/min的额定状态下,通入1 A的励磁电流,得出新型爪极电机和传统爪极电机转子的磁力线云图,如图6所示。

(a) 传统爪极电机
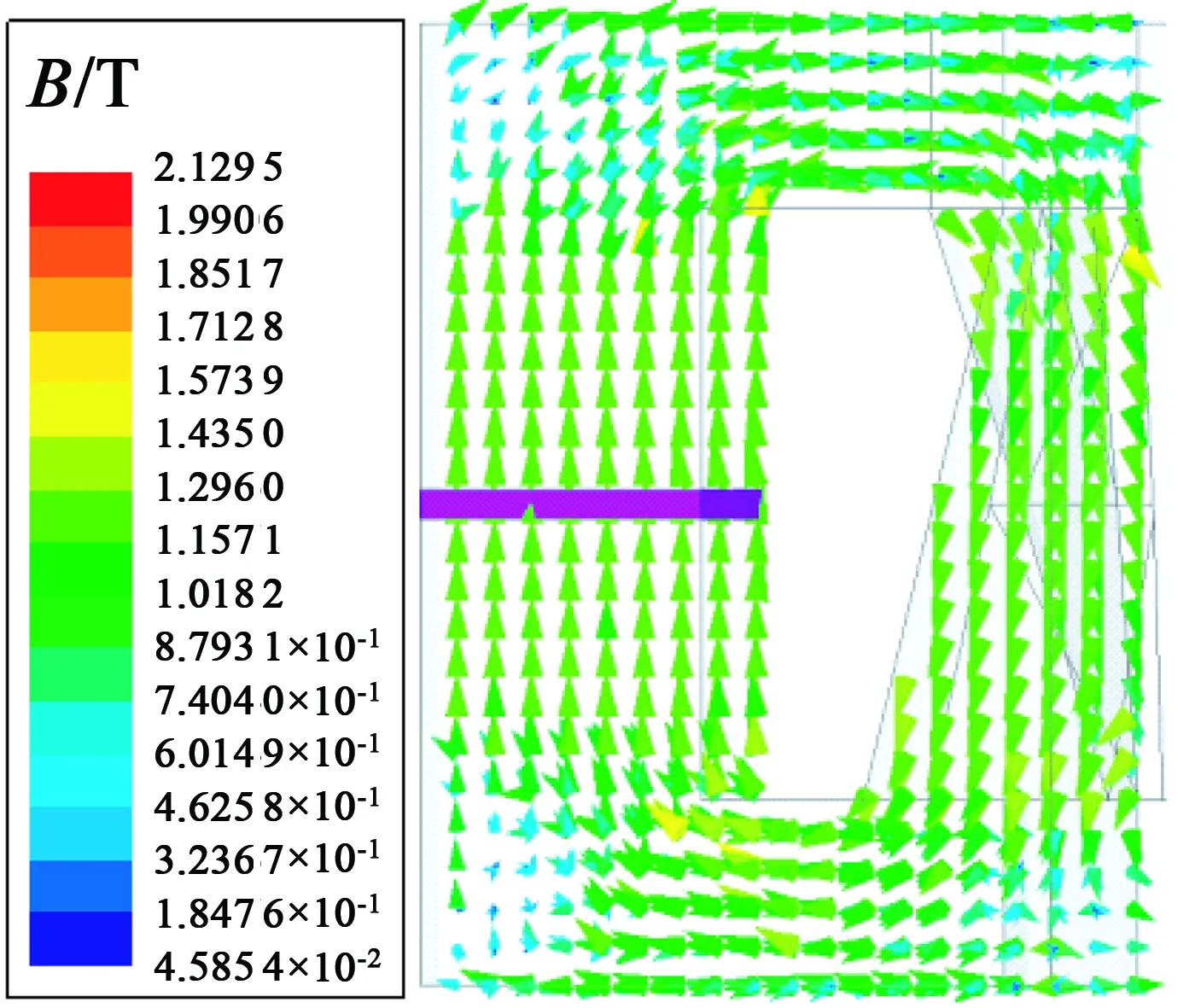
(b) 新型爪极电机
爪极电机由于本身结构特性,容易达到磁饱和状态。新型混合励磁爪极电机由于在主磁路部分增加了永磁体,相比于传统爪极电机,在达到磁饱和状态后,永磁体的存在会对主磁路产生影响。图7为通入10 A励磁电流状态下新型爪极电机和传统爪极电机转子磁力线云图。
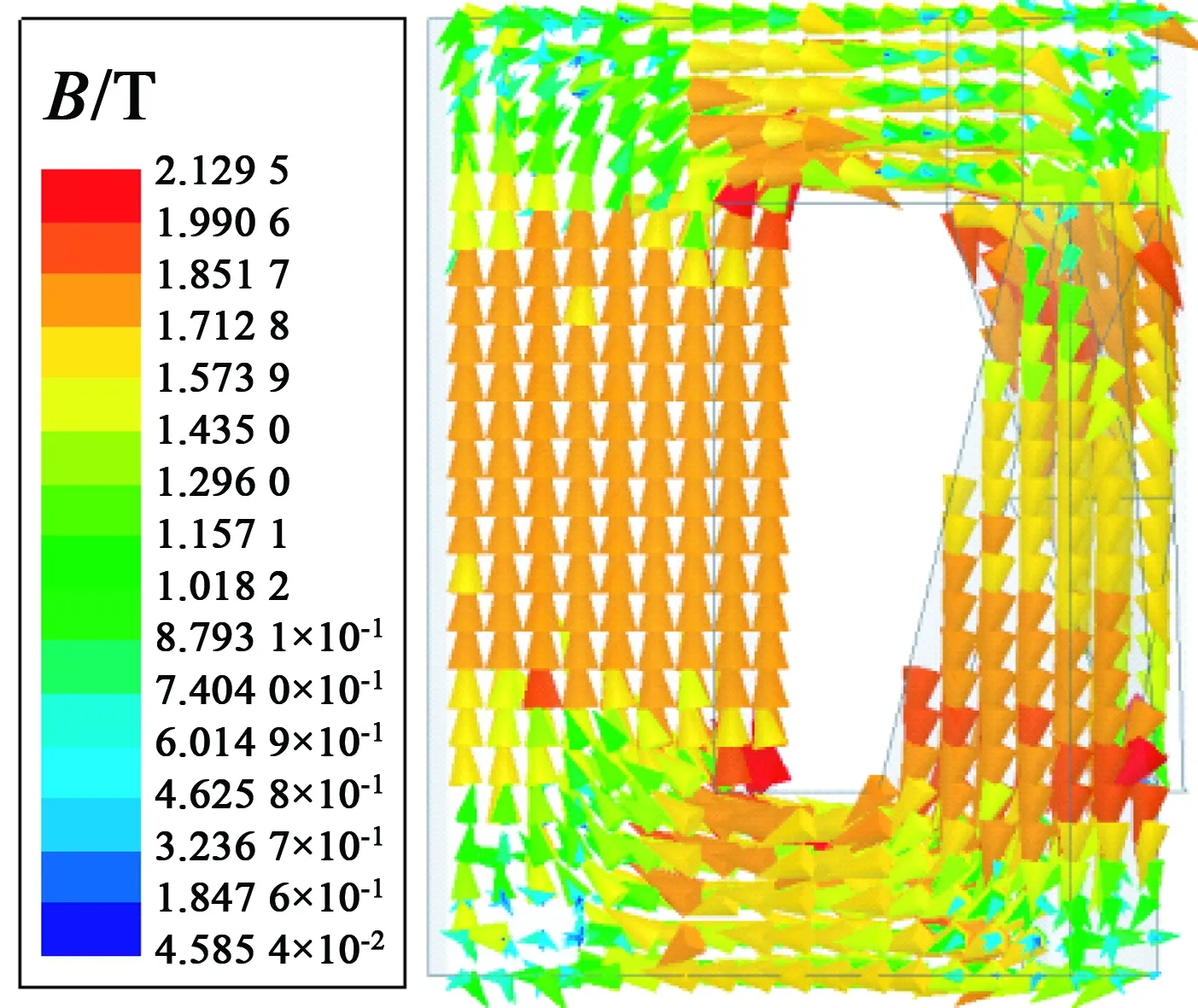
(a) 传统爪极电机

(b) 新型爪极电机
图6和图7表示,新型混合励磁爪极电机由于存在永磁体,永磁体本身的磁场会对整个电机磁路造成影响,会增大爪极电机总磁场强度。达到磁饱和之后,随着励磁电流的增大,永磁体对爪极电机的磁场影响就会减弱,甚至使爪极电机总磁场强度减小。对比图4(a)和图7(b)可以看出,分别在通入5.4 A和10 A励磁电流时,新型电机转子的磁力线云图变化不大,因此电机饱和励磁电流在5.4 A左右。
作为发电机,电机的电枢电流特性是研究电机的重要指标,尤其是在不同转速下电机电枢电流是衡量发电机的标准之一[14]。由于电机三相电流成对称结构,因此A相电流可以代表电枢电流。图8给出了两种电机在不同转速下的A相电流有效值。
由图8可以得出以下结论:
(a) 在1 000~4 000 r/min时,随着转速的提高,电流增大速度比较快,随着电机转速的提升,电机的反电动势增加;
(b) 在4 000~8 000 r/min时,随着转速的提高,电流增大速度变缓;
(c) 最后在电机转速达到8 000 r/min以后,随着电机转速的提升,A相电流不再增加,趋于稳定;
(d) 新型爪极电机比传统爪极电机有着更大的A相电流,新型爪极电机A相最大时电流为115.65 A,传统爪极电机A相电流为103.69 A。

图8 不同转速下A相电流有效值
由图4和图7可知,爪极电机存在磁饱和现象,通入1~10 A励磁电流,电机A相电流有效值变化的趋势如图9所示。

图9 通入1~10 A励磁电流时A相电流变化
由图9可以得出以下结论:
(a) 传统爪极电机和新型爪极电机A相电流都会随着励磁电流的增大而增大,但在低励磁电流情况下增大趋势较为明显;在高励磁电流时,增大趋势减小。同时在低励磁电流时,新型爪极电机由于永磁体阻碍电励磁磁路,因此增大速度没有传统爪极电机大,但电流值要比传统爪极电机大;
(b) 新型混合励磁爪极电机由于存在永磁体,在励磁电流为零时,仍能产生36.09 A的相电流,可以实现自励;
(c) 新型混合励磁爪极电机在低励磁电流时,电机的A相电流受电励磁磁场和永磁体磁场共同作用影响,在达到磁饱和后,电机的A相电流主要受电励磁磁场影响。
3.3 反电流下新型爪极电机仿真研究
相比于传统永磁励磁爪极电机,新型混合励磁爪极电机可以通过改变电流的大小和方向实现弱磁控制。当新型混合励磁爪极电机通入相反电流时,电励磁磁场和永磁励磁磁场方向相反,会对电机性能产生影响。图10为新型爪极电机通-10 A~0的励磁电流时电机A相电流变化图。

图10 励磁电流0~-10 A时电机A相电流变化图
由图10可以得出:爪极电机在通入-10 A~0励磁电流时,A相电流先减小后增大;在通入-3 A励磁电流时,爪极电机的电励磁磁场和永磁励磁磁场相互抵消,A相电流为0。
4 永磁体厚度对A相电流的影响
新型混合励磁爪极电机存在励磁磁环,励磁形成的主要磁力线要经过转子轭部形成回路,这一部分为爪极电机的主磁通部分,而新型混合励磁爪极电机在转子轭部增加永磁体,永磁体的磁通特性要小于电机转子材料的磁通特性[15],因此由电励磁产生的磁场会受到永磁体的影响。参考电机整体的磁场与磁场回路特性,永磁体厚度的选择显得尤为重要,选取气隙的1~9倍(0.4~3.6 mm)和5~20倍(2 ~10 mm),两种不同范围厚度的永磁体进行对比分析,其A相电流变化如图11和图12所示。

图11 永磁体厚度0.4~3.6 mm对A相电流的影响
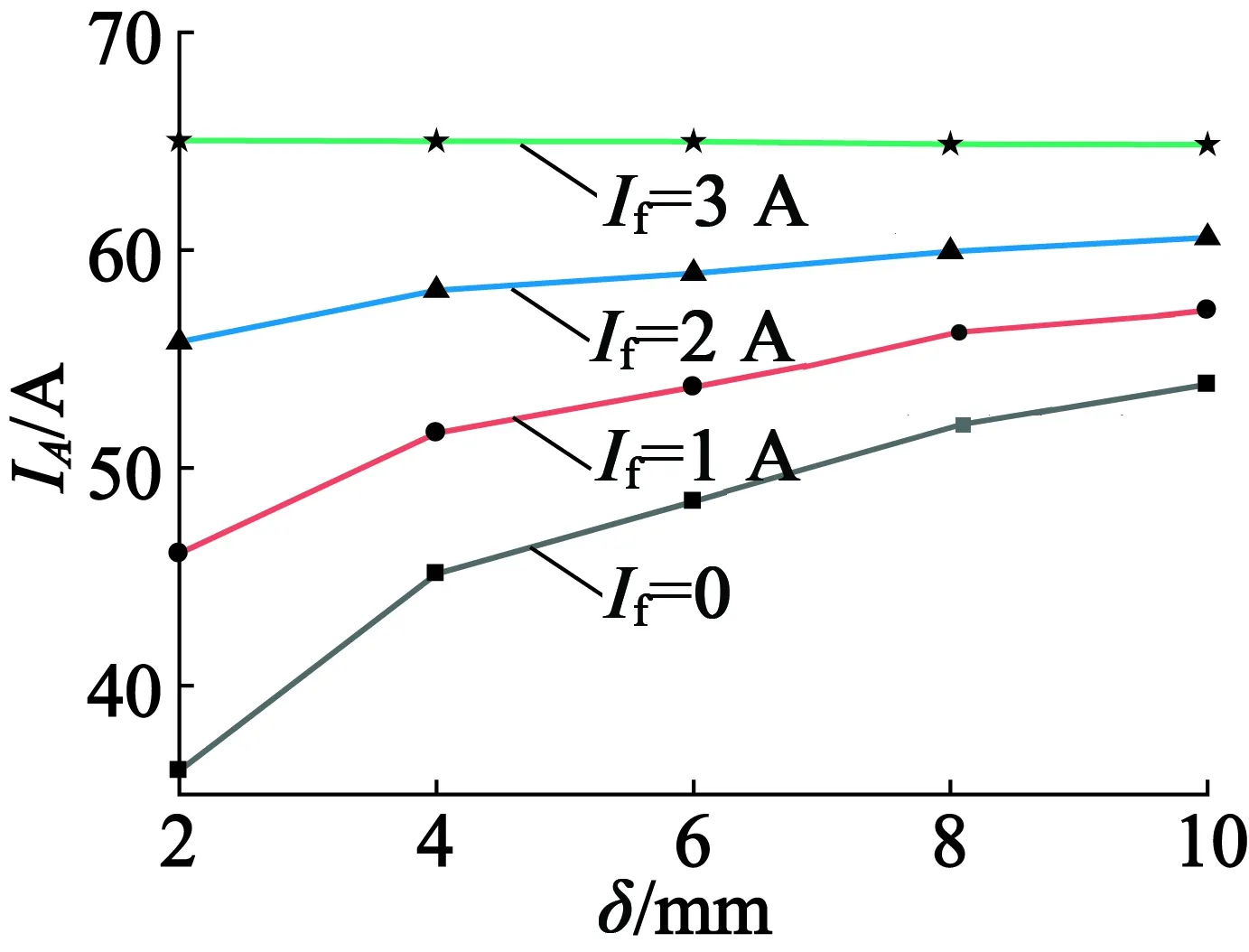
图12 永磁体厚度2~10 mm对A相电流的影响
由图11和图12可以得出以下结论:
(a) 低励磁电流情况下,随着励磁电流的增大,A相电流也相应增大,但励磁电流对A相电流的增幅作用在永磁体厚度较小时更为明显,随着永磁体厚度增加,作用效果越小;
(b) 当励磁电流过大时,永磁体厚度对于A相电流的影响减小直至无影响;
(c) 永磁体厚度较大情况下,随着厚度增大,A相电流随之增加,但是增幅效果逐渐减小,励磁电流对A相电流的影响效果逐渐减小;
(d) 永磁体厚度较小时,A相电流先增大后减小再增大,励磁电流对A相电流的影响效果逐渐减小,在永磁体厚度为气隙的5倍时,A相电流达到最大。
5 结 语
本文根据爪极电机的结构和励磁特点,研究了一种新型混合励磁爪极发电机,介绍了新型爪极发电机的结构和电磁原理,并运用三维有限元软件对新型爪极电机进行了建模分析。通过建模分析可以得出以下结论:
1) 新型爪极电机所增加的永磁体磁路可以和传统的电励磁磁路形成叠加作用,从而实现混合励磁作用;
2) 新型爪极电机在额定状态下有着比较好的性能,其中相电流达到99.57 A,转矩达到11.13 N·m。转矩波动较小;
3) 新型混合励磁爪极可以通过调节励磁电流大小和方向实现弱磁控制,当永磁体厚度为2 mm,通入-3 A励磁电流时可实现相电流为0;
4) 永磁体厚度对电机的主要磁场产生一定的影响,未达到磁饱和情况下,永磁体厚度较小时,电机磁场主要由电励磁磁场决定,随着厚度增加,电机磁场主要由电励磁磁场和永磁磁场决定,当厚度增大到一定程度,电机磁场主要由永磁磁场决定。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
大电机技术(2022年3期)2022-08-06
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
冶金设备(2022年1期)2022-06-10
大电机技术(2022年2期)2022-06-05
计算机仿真(2022年1期)2022-03-01
防爆电机(2022年1期)2022-02-16
水下无人系统学报(2021年6期)2022-01-15
河北农机(2021年3期)2021-03-31
科技视界(2020年19期)2020-07-30