多轴振动与冲击复合环境试验技术研究
2019-02-21 10:02:24邹学利李宏民王海燕
振动与冲击 2019年3期
邹学利, 李宏民, 王海燕
(航天科工防御技术研究试验中心, 北京 100854)
随着防空导弹的更新换代,其战技指标越来越高,导弹的设计余量越来越小,在这种情况下,地面模拟验证试验的真实性显得尤为重要,对于存在设计缺陷或工艺缺陷的导弹产品不能误判,降低产品的飞行可靠性,同时对于满足环境适应性要求的导弹产品也力求不能误判,以免造成资源浪费和研制周期的延误。因此,尽量模拟导弹的真实环境进行地面模拟验证是目前环境试验技术的一个重要发展方向。
导弹飞行环境十分复杂,不仅有多轴振动、冲击、加速度等力学环境,有时这些力学环境是交叉存在的,因此仅用多轴振动、冲击或加速度等单力学环境并不能真实模拟导弹飞行环境,比如拦截器在进行机动变轨飞行时,其姿轨控发动机需要进行间歇点火工作,这种横向脉冲冲击与拦截器的飞行振动耦合是一种典型的复合环境。为了模拟该复合环境,本文开展了多轴振动与冲击复合环境试验技术研究,在试验系统搭建、试验控制以及振动与冲击解耦等方面进行了深入研究,并通过试验案例进行了验证,试验控制结果表明该方法是可行的,具有很大的工程应用价值。
1 多轴振动与冲击复合试验系统搭建方案
多轴振动与冲击复合试验系统的搭建方案不是唯一的,主要取决于试验件、模拟的试验环境以及相关的试验要求。如果模拟的试验环境中,振动与冲击方向相同,只能通过时域波形复现技术来实现,即将经过预处理后的遥测数据(含振动与冲击)直接在实验室进行时域波形复现。如果模拟的试验环境中,振动与冲击方向相互垂直,则可进行谱控制。试验件主要对激励方案有影响,比如细长试验件可采用点激励方案(不含试验台面,激振器通过工装直接作用于试验件),而一般的弹上设备,通常采用面激励方式(试验件固定在试验台面上)。试验要求决定了哪些自由度上施加振动载荷,哪些自由度上施加冲击载荷。
本文针对细长试验件(如整弹)搭建一套系统,见图1。横侧向的两个激振器施加冲击载荷,垂直向和轴向的三个激振器施加振动载荷,这是一个五自由度试验系统,沿试验件的轴向和垂直向可实现线性振动,绕横侧轴可实现角振动,沿横侧轴可实现线性冲击,绕垂直轴可实现角冲击。该系统有如下特点:
1) 振动平面与冲击平面相互垂直
当位移不是很大时,冲击方向始终与振动方向垂直,因此在一阶谐振频率以下,振动与冲击的耦合程度很小,可以忽略不计,而在一阶频率以上,由于试验件的柔性变形,振动和冲击的耦合程度会很大,给试验控制造成了很大困难。
2) 试验系统为静定系统
为了解决系统的稳定性,提高系统的线性度和时不变性,在两个垂直振动台上布置了双球头并联装置,该装置将绕轴向转动的自由度进行了刚性限制,同时又不影响其他方向上的解耦,通过该设计实现了试验件自由度的数量与激励点的数量相等,将静不定系统转换为静定系统,大大提高了多轴振动与冲击复合环境试验的控制精度,降低了控制难度。
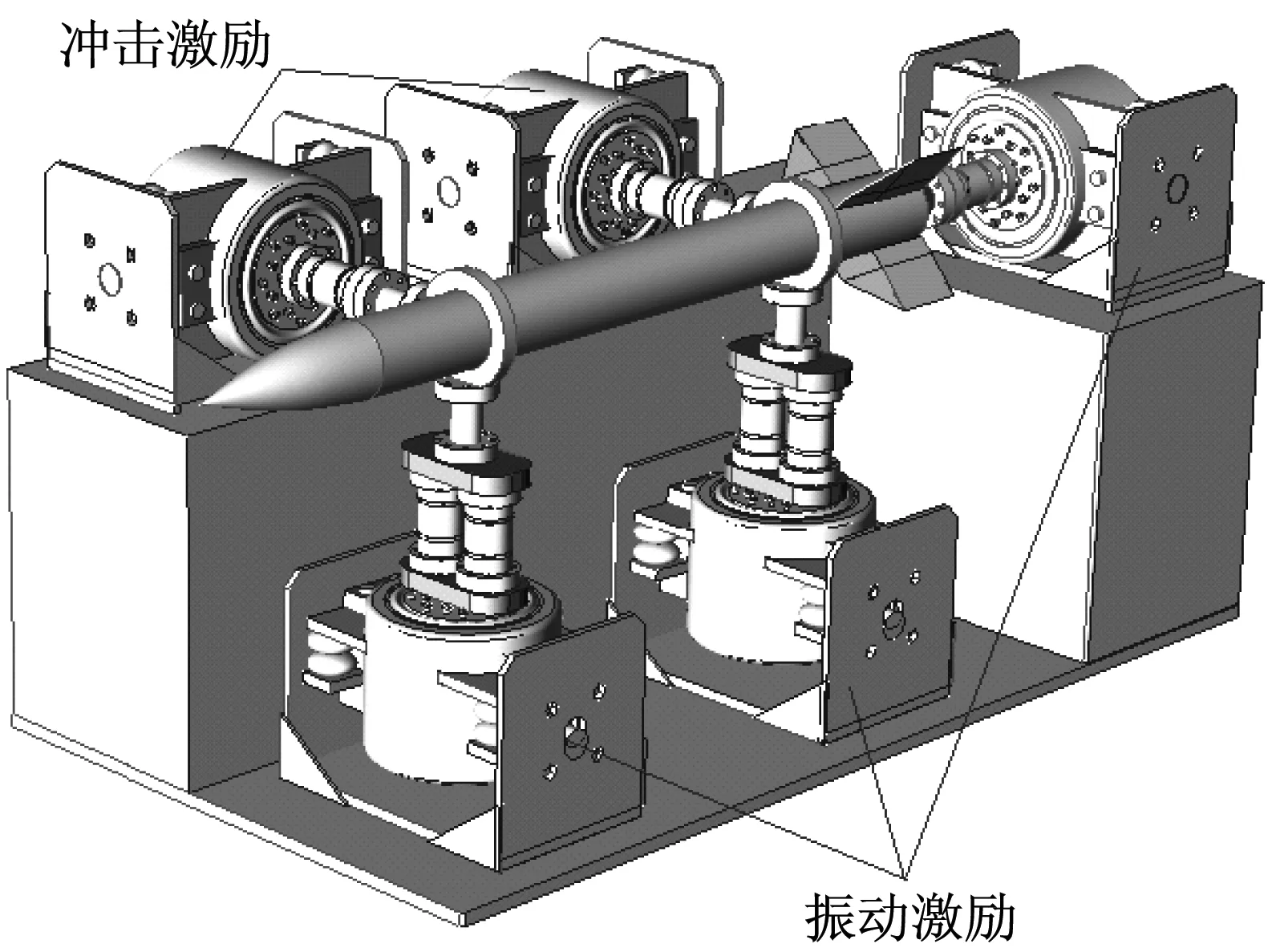
图1 多轴振动与冲击复合环境试验系统
2 多轴振动与冲击复合试验控制技术
2.1 振动与冲击的交叉耦合
本文给出的系统搭建方案,振动所在平面与冲击所在平面相互垂直,如果试验件是一刚体,振动与冲击是不会相互干扰的,只有试验件表现出柔性,才会导致振动与冲击交叉耦合。试验件在一阶频率以下表现为刚体,振动与冲击没有耦合存在,在一阶频率以上,试验件会发生柔性变形,振动与冲击存在较严重的交叉耦合。因此,耦合到冲击响应中的振动信号其下限频率应该是试验件的一阶频率。
综上所述,对于典型冲击试验,振动与冲击的耦合存在两种情况:
1) 试验件的一阶频率大于冲击信号的上限频率。此时耦合到冲击响应中的振动分量下限频率将大于冲击信号的上限频率,振动频率与冲击频率没有发生混叠。
2) 试验件的一阶频率小于冲击信号的上限频率。此时耦合到冲击响应中的振动分量下限频率将小于冲击信号的上限频率,振动频率与冲击频率将发生混叠。
由于冲击响应谱试验的频率范围很宽,第一种情况是不存在的,只有第二种情况存在,因此冲击响应中的振动分量与冲击分量必然发生频率混叠。
对于半正弦冲击,可将9/2D(D为冲击信号的脉冲宽度)作为上限频率,大于9/2D的频率成分可忽略。对于其它类型的冲击试验(比如矩形波、梯形波、后峰锯齿波等),由于冲击能量随频率的增加衰减略慢一些,可适当提高上限频率。
典型冲击的能量主要集中在低频(主瓣频率以下),即大部分能量处于试验件的一阶频率以下,其耦合到振动响应中的能量很小,可以忽略不计。如果是冲击响应谱试验,冲击过程对振动的影响会很大,但由于冲击时间很短暂,只要两次冲击的时间间隔足够长,振动响应会逐渐均衡到试验要求值。因此,本文只考虑了振动对冲击的影响,而没有考虑冲击对振动的影响。
2.2 试验控制方案
MIMO振动和MIMO冲击的控制原理不同,需要采用两个独立的控制仪分别进行控制,由于试验过程中,振动与冲击存在交叉耦合现象,两个控制仪独立控制无法实现振动与冲击的解耦,所以对试验控制的影响比较大。
本文对振动与冲击的解耦方法进行了研究,提出了图2所示的试验控制方案。该方案采用两个独立的控制仪,分别控制MIMO振动与MIMO冲击,在冲击控制回路中设计了一个信号分离装置,可以将冲击响应中含有的振动分量剔除。
根据前面的讨论,当试验件的一阶频率大于冲击信号的上限频率时,冲击响应中的振动频率与冲击频率没有发生混叠,可以通过低通滤波将冲击响应中的振动分量剔除。当试验件的一阶频率小于冲击信号的上限频率时,冲击响应中的振动频率与冲击频率将发生混叠,滤波的方法已经不适用,必须采用一种信号分离技术实现振动信号与冲击信号的分离。针对这两种情况,信号分离器需要设计两个模块儿,实现两种功能:低通滤波与信号分离。可根据不同的情况,选择不同的功能或其组合进行试验,达到最好的试验效果。
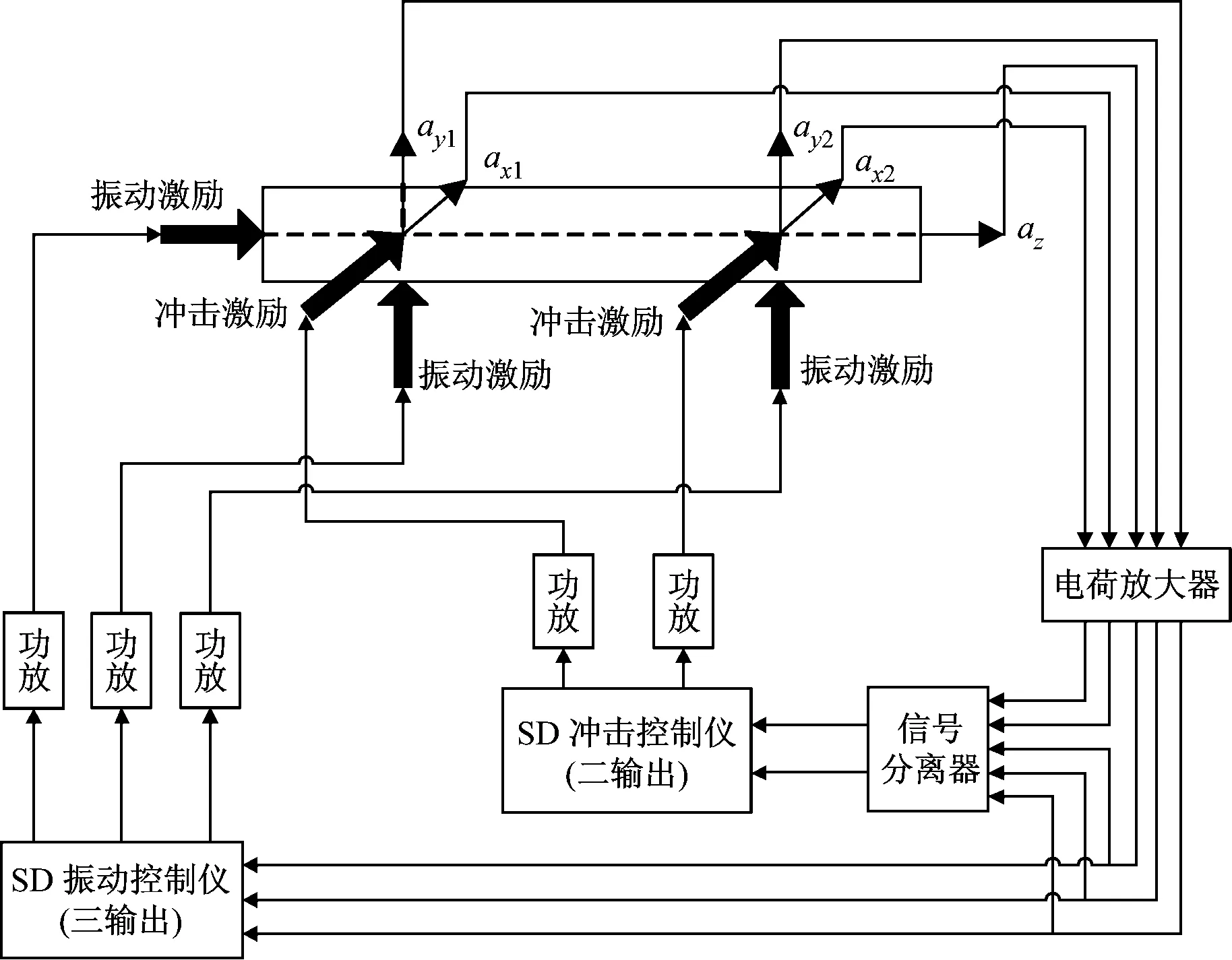
图2 多轴振动与冲击复合试验的控制方案
由于交叉耦合的存在,导致冲击控制点的响应含有两个分量:冲击激励产生的冲击响应和振动激励产生的振动响应。信号分离器具有实时输入和实时输出的功能,其作用就是剔除冲击控制点响应信号中含有的振动耦合分量,并将干净的冲击信号反馈给冲击控制仪形成闭环控制。因此,图2所示的闭环控制方案并没有消除冲击控制点的振动响应,而是对其进行隔离,控制仪显示的冲击控制曲线并不是冲击控制点的实际响应曲线,而是由冲击激励产生的冲击响应分量。
对于多轴振动与冲击复合环境试验技术,我们要实现的就是振动激励和冲击激励共同作用下产生的复合环境,冲击信号中含有振动响应正是我们所需的。本文控制的目标是:保证振动激励在振动控制点上产生的振动响应和冲击激励在冲击控制点上产生的冲击响应分别达到设置要求,而不是它们交叉耦合后的混合信号达到设置要求,至于两种信号如何耦合完全由试验件的结构(模态参数)来完成,这与飞行状态是吻合的。
2.3 信号分离器的设计原理
信号分离的方法很多,其中应用最广泛的两种方法是盲源信号分离技术[1-4]和独立分量分析的信号分离技术[5-6],这两种方法已经比较成熟,常用于故障诊断、语音、通信以及图像处理等领域。它们有一个共同的特点,就是只能得到与原始信号波形完全一致但幅值存在较大差异的信号,这一点不能满足本文对信号分离技术的要求。本文采用的信号分离技术是基于偏相干理论发展而来的,这种方法可以完全实现对原始信号的复原。
冲击信号中含有的振动分量是由振动激励产生的,所以冲击信号中的振动分量与振动激励信号是相干的,同时由于采用两个控制仪独立控制,振动激励与冲击响应信号是不相干的,因此,信号分离器设计的基本原理就是:利用偏相干理论,将冲击信号中与三个振动激励信号相干的分量剔除。
2.3.1 多轴振动与冲击复合系统的条件输入模型
系统为五输入单输出系统,五个输入分别对应五个控制点,x1、x2、x3为振动输入(振动控制点),x4、x5为冲击输入(冲击控制点),y为输出,根据本文所讨论问题的特点,主要计算输入之间的相互关系,所以输出是一个虚拟量,可将任一测量点的响应作为输出,见图3。
由于交叉耦合的存在,控制点之间存在一定的相干性,比如冲击响应(x4和x5)中含有前三个振动输入(x1、x2和)x3的耦合分量,因此他们之间的相干函数在0和1之间。设计信号分离器的目的就是去除冲击响应中的振动耦合分量,因此为了便于计算,将图3所示系统简化为图4所示的条件输入模型[7-9]。x2·1为信号x2去掉x1影响后的信号(即去除信号x2中与x1相干的分量后的信号),x3·2!为信号x3去掉信号x1、x2影响后的信号,依此类推。根据上述表示法,噪声信号n可表示为输出信号y去掉所有输入信号x1、x2、x3、x4、x5的影响后的信号,即n=yy·5!。
条件输入模型中的所有输入信号之间是完全不相干的。x4·3!和x5·3!即为去除振动耦合分量后的冲击信号,因此,最后计算得到x4·3!和x5·3!是信号分离器必须完成的主要工作。
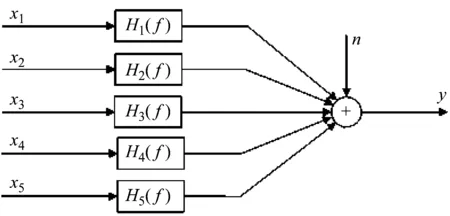
图3 五输入单输出系统
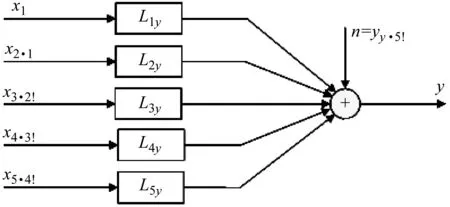
图4 条件输入时的五输入单输出模型
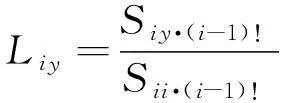
2.3.2 条件输入时的频响函数
现在考虑图4所示的条件输入时的多输入单输出模型。图4所示系统的输入和输出关系可以表示为:
(1)
式中:Xi·(i-1)!、Y、N分别为xi·(i-1)!、y、n的傅里叶频谱。令Niy表示噪声量,则有:
Niy=Y-LiyXi·(i-1)!,i=1,2,…,5
(2)
Niy表示输出Y与条件输入Xi·(i-1)!通过Liy后的输出之间的差,其中包含了外输入噪声N和其它条件输入对输出Y的贡献。于是有:
(3)
两边取期望值并除以T,展开并整理后可得:

(4)

(5)
解得:
(6)
式(6)是输入对输出的最优系统,类似地,输入和输入之间的最优系统为:
(7)
2.3.3 条件频谱
如果令Y=X6,则统一了输入和输出的表示法,而噪声可以表示为N=X6·5,于是式(1)可改写成:
(8)
如果只考虑头r个有序条件输入的影响,可得更一般的表达式:
(9)
个输入去除前r个输入影响后的信号,所以二者相加后一定等于第j个输入Xj。
对于式(9),如果用(r-1)代替r,则公式变为:
(10)
用式(9)减去式(10)可得[11-12]:
Xj·r!=Xj·(r-1)!-LrjXr·(r-1)!
(11)
式(11)就是条件频谱的迭代算法。若令r=i-1则有下式成立:
Xj·(i-1)!=Xj·(i-2)!-L(i-1)jXi-1·(i-2)!
(12)
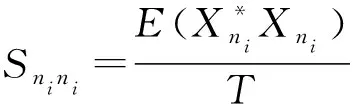
2.3.4 条件功率谱
对于多输入单输出系统中条件谱密度函数的计算,可以按照计算功率谱密度的基本公式进行[13-14]:
(13)
(14)
然后两边取期望值再除以T,这样就可得出条件谱密度函数的一般公式:
Sij·r!=Sij·(r-1)!-LrjSir·(r-1)!
(15)
2.3.5 迭代公式
联合式(12)、(15)和(7),并考虑到计算的先后顺序以及下标之间的相互关系可形成以下迭代公式
(16)
式中:i=2,…,5,j=i,i+1,…,5,r=1,2,…,i-1。
首先计算输入信号的频谱Xj(j=1,2,…,5)、自谱Sjj(j=1,2,…,5)和互谱Sij(i≠j且i=1,2,…,5,j=1,2,…,5),然后代入递推式(16)中即可逐步计算得到所有的条件频谱Xj·(i-1)!。由于信号分离的目标是去除冲击信号中的振动分量,因此我们所关心的是条件频谱X4·3!(j=4,i=4)和X5·3!(j=5,i=4),对其进行傅里叶逆变换可得到时域信号x4·3!和x5·3!,这就是最终的处理结果,即降噪后的冲击时域数据。
分离后的冲击信号如果还有一些毛刺(随机噪声),可进一步采用滑动平均法对冲击曲线进行平滑处理。为了书写方便,将分离后的冲击时域数据(x4·3!或x5·3!)赋值给z(t),其离散值为z1,z2,…,zm,m为数据的长度,可采用如下公式对其进行平滑处理:
(17)
平滑处理最适合经典冲击的降噪,因为冲击信号本身受到的影响很小。在平滑处理的过程中,如果一次平均效果达不到要求,可设置多次平均。平均次数的选择应该在满足要求的前提下,尽可能小一些。
2.4 信号分离器的设计方案
信号分离器的设计方案见图5。信号分离器有五个输入通道,两个输出通道。x1、x2、x3为振动输入通道,连接振动控制点,x4、x5为冲击输入通道,连接冲击控制点。y1、y2为输出通道,其输出为信号x4、x5去除与信号x1、x2、x3相干的分量后的冲击信号x4·3!和x5·3!。信号分离器输出的冲击信号反馈给冲击控制仪形成闭环,见图2。
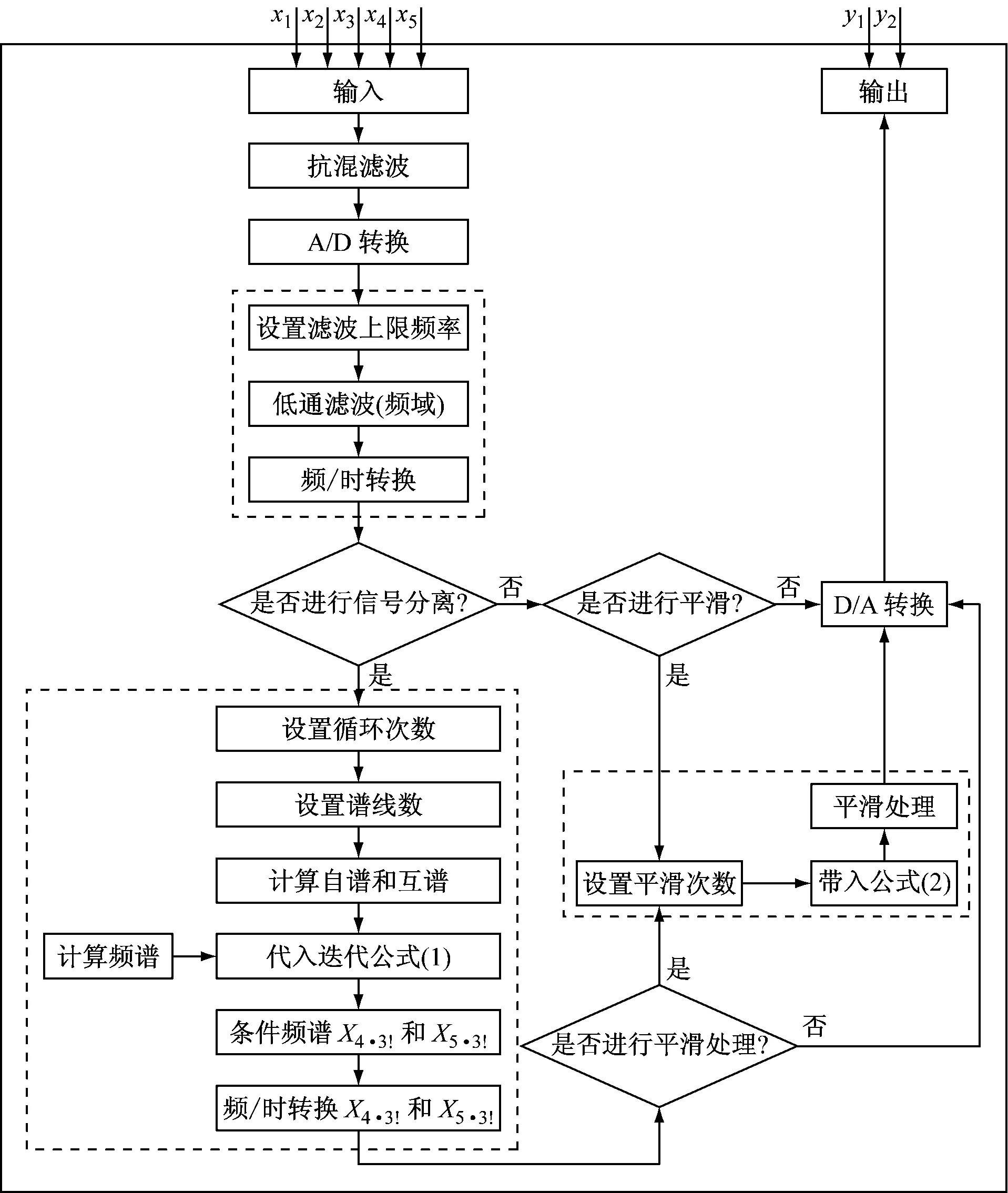
图5 信号分离器的设计方案
信号分离器可实现三大功能:低通滤波(数字滤波)、信号分离和滑动平均。设计方案中有三个逻辑判断,判断依据都是预试验结果。首先进行小量级的预试验,选择信号分离器的不同功能,寻找最佳的功能组合。
1) “是否进行信号分离”的判断
理论上,判断依据应该是试验件的一阶频率是否大于冲击信号的上限频率,但实际上由于试验件的一阶频率经常不知道,所以预试验结果才是判断的最佳依据。
信号分离器的滤波功能为必选功能,其上限频率是冲击信号的上限频率。如果经过滤波后,冲击信号比较干净了,就不需要其它功能了,在该逻辑判断中选择“否”。如果滤波后,冲击信号仍含有大量的随机振动分量,则在该逻辑判断中选择“是”。
2) 滤波后“是否进行平滑”的判断
以预试验结果作为判断依据。如果经过滤波处理后,冲击曲线还含有一些毛刺(幅值不是很大的情况,如果幅值很大则应该选择信号分离功能),则在逻辑判断中选择“是”,如果滤波后冲击曲线已经比较光滑了,选择“否”。
3) 信号分离后“是否进行平滑”的判断
同样以预试验结果作为判断依据,判断方法同上。
预试验时,可进行各种功能组合、调试,取试验效果最佳的组合作为正式试验的设置依据。
信号分离器的硬件系统设计及软件编程由北京爱普卓思科技有限公司根据前面给出的设计方案和理论算法完成,见图6。信号分离器的采样频率为100 k,信号采集的AD位数为24 bits,信号输出的DAC位数为16位,采用同步并行采样,信号采集的精度优于0.3%,各项指标均达到了设计要求。

图6 信号分离器实物图
3 案例分析
按照图1搭建了一套多轴振动与冲击复合环境试验系统,见图7。试验件为铝合金圆筒,一阶频率为100 Hz,振动与冲击发生器均选择1 t小振动台,五个振动台通过解耦装置和工装分别作用在五个激励点上,解耦装置是推力为1 t的球头。对应五个振动台选择了五个控制点(三个振动控制点和两个冲击控制点),控制点位置见图7,传感器的黏贴方向与对应振动台的激励方向一致。
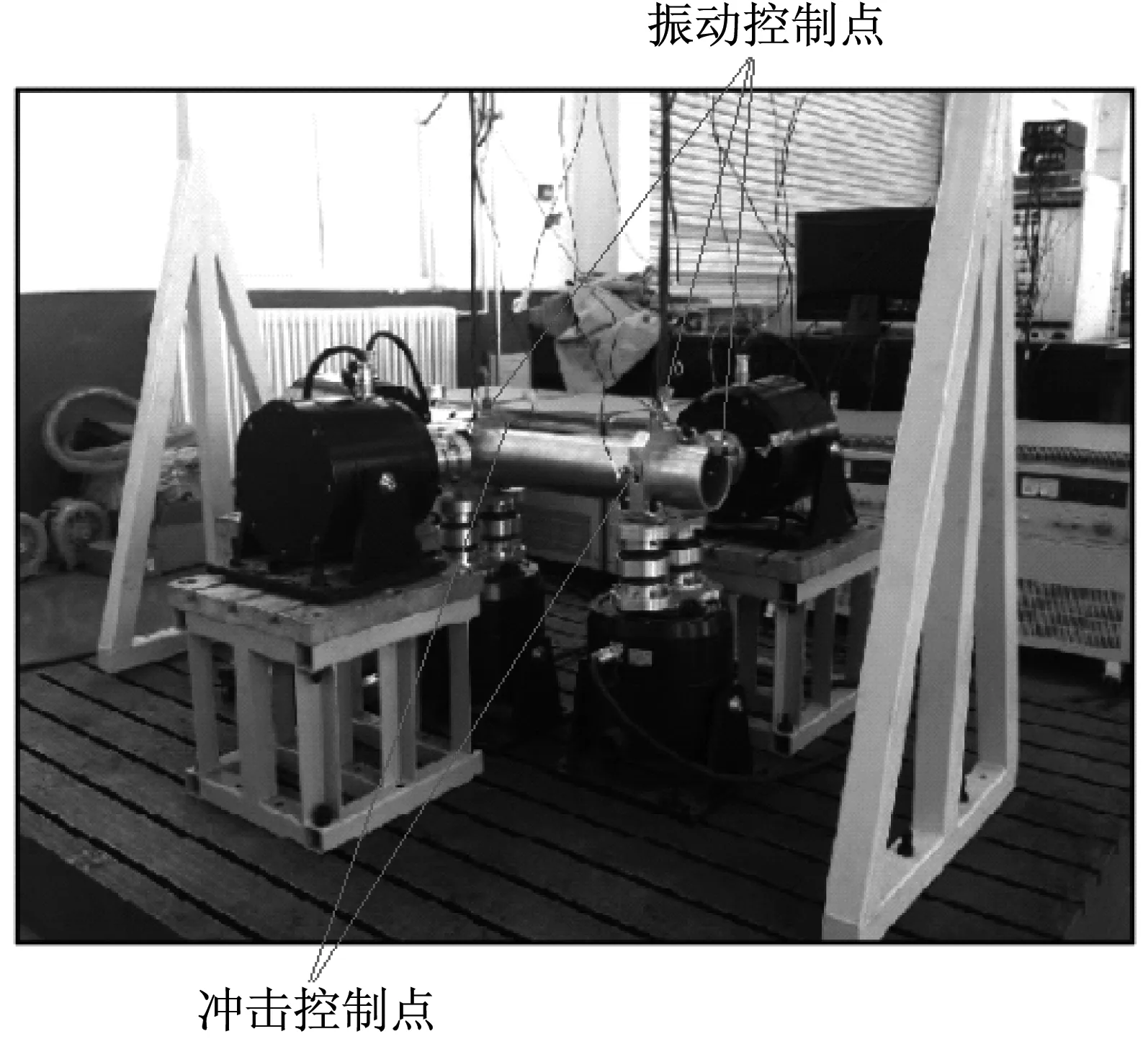
图7 多轴振动与冲击复合试验系统
为了验证信号分离器的信号分离效果,在设计模拟试验件时,将其一阶频率设计为100 Hz,如果冲击试验的脉冲宽度小于20 ms,其上限频率将大于250 Hz(将5/D作为半正弦冲击的上限频率),此时冲击响应信号中冲击分量与振动分量的重叠频率的带宽应大于150 Hz,说明频率重叠的程度比较严重,而且随着冲击试验脉冲宽度的减小,频率的重叠程度会越来越严重。
利用该系统进行如下多轴振动与冲击复合环境试验:
1) 三个振动控制点的试验参考谱均为:20~80 Hz,3 dB/oct;80~350 Hz,0.02 g2/Hz; 350~2 000 Hz,-3 dB/oct。控制点之间的相干函数设置为0.1,相位设置为0。均方根值为4.2 g。
2) 两个冲击控制点的峰值加速度设置为10 g,脉冲宽度为20 ms。
对于随机振动试验,零相位更容易控制,因此相位设置为0。在零相位的情况下,如果相干函数设置较大,试验中试验件将做同步振动,为了让试验件振动过程中存在一定的角振动(存在角振动时,系统振动状态会更复杂,线性度相对较差,更能考验试验方法的可行性),应该选择一个较小的相干函数,这里将相干函数设置为0.1(在可控的前提下,还可以选择更小的值)。
按照图2所示方案连接控制系统进行试验。先启动振动试验,达到满量级一定时间后启动冲击试验程序。图8、图10和图12分别为连续三次冲击的控制曲线,控制精度完全能够满足试验容差要求,且试验过程中控制平稳,收敛性较好。因此信号分离器在试验控制环节的作用达到了预期效果。
如前所述,冲击控制曲线并不是冲击控制点上的实际响应曲线,它只是反映了冲击控制点上冲击分量的峰值、脉宽和波形。图9、图11和图13分别为三次冲击下,冲击控制点上的实际响应。对比发现,信号分离器的分离效果是十分明显的。
图14为振动控制曲线。由于振动响应没有进行任何处理,因此振动控制曲线就是振动控制点的实际响应曲线,从图中可以看出,振动控制曲线没有受到冲击信号的干扰。
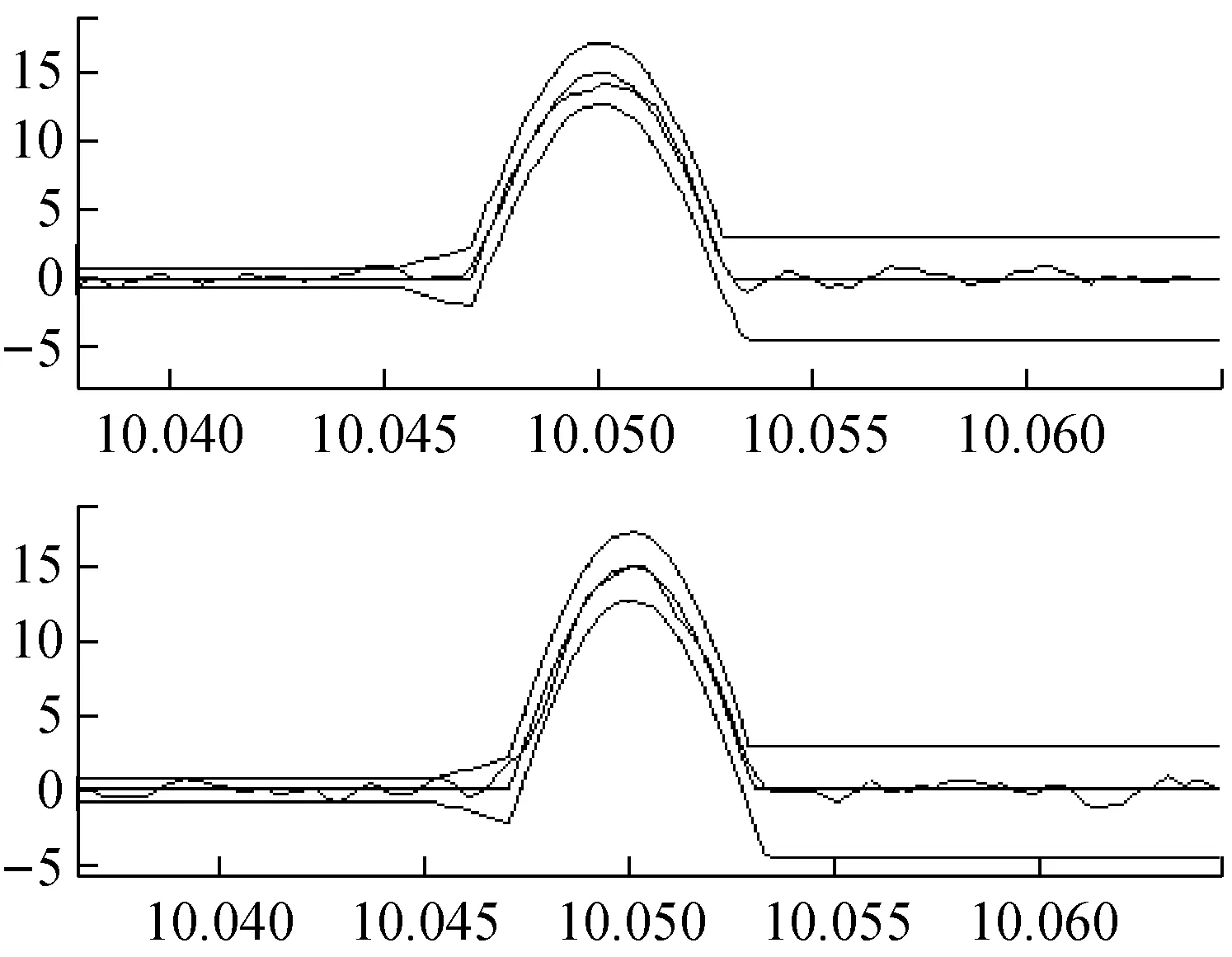
图8 第一次冲击的控制曲线
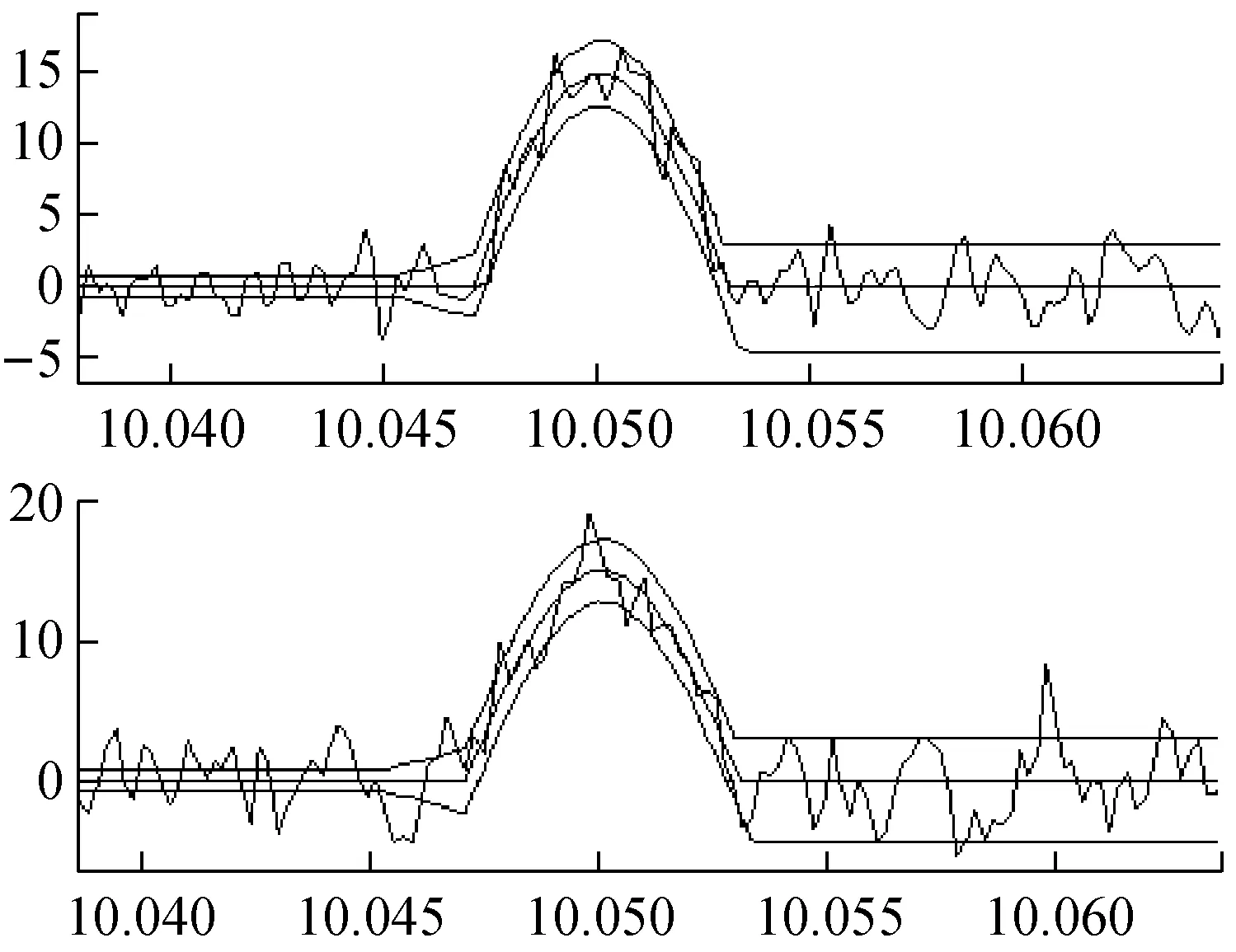
图9 第一次冲击的实际响应曲线

图10 第二次冲击的控制曲线
4 结 论
信号分离器的设计原理基于相干函数,而相干函数归根结底是反映信号之间线性关系的函数[15],如果系统的非线性因素较多,导致输出与输入之间相干性较差,信号分离器的分离精度将会大幅减弱,因此,在设计系统搭建方案时应尽可能降低非线性存在的因素,图1中的双球头并联装置就是为提高系统线性度而设计的。

图11 第二次冲击的实际响应曲线
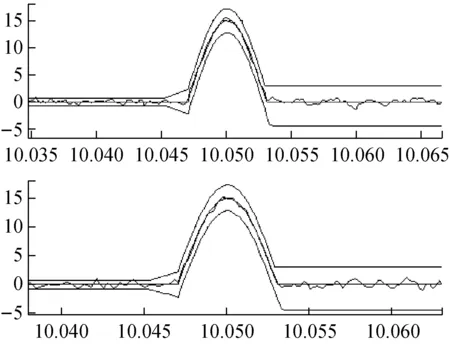
图12 第三次冲击的控制曲线
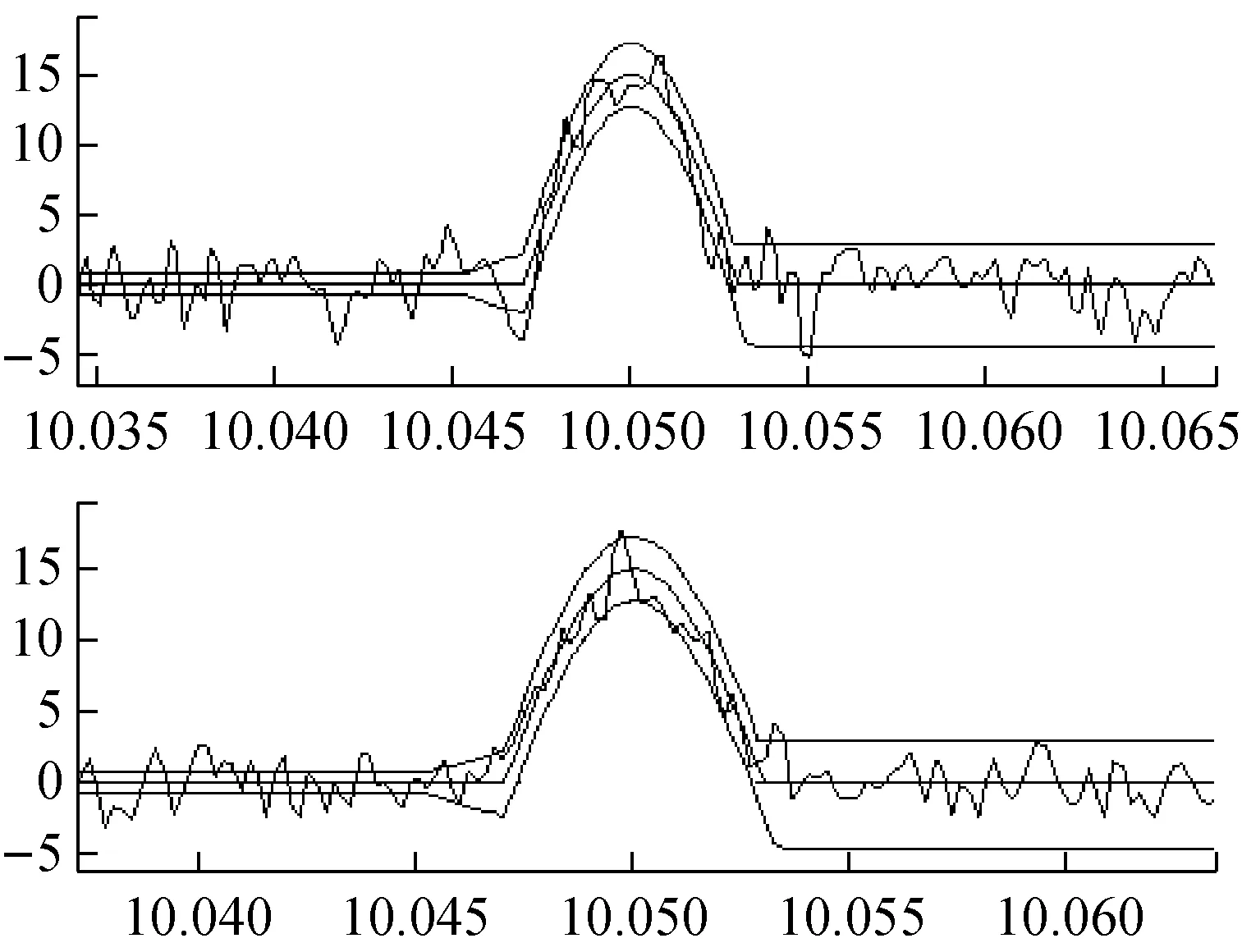
图13 第三次冲击的实际响应曲线
试验证明,每次冲击加载的过程中,振动控制曲线基本没有变化,而振动对冲击的影响非常大,冲击曲线含有大量的振动耦合分量,因此在控制方案中没有考虑冲击对振动的影响是正确的。信号分离器可以有效去除振动分量,冲击控制过程平稳,所以闭环控制方案是完全可行的。
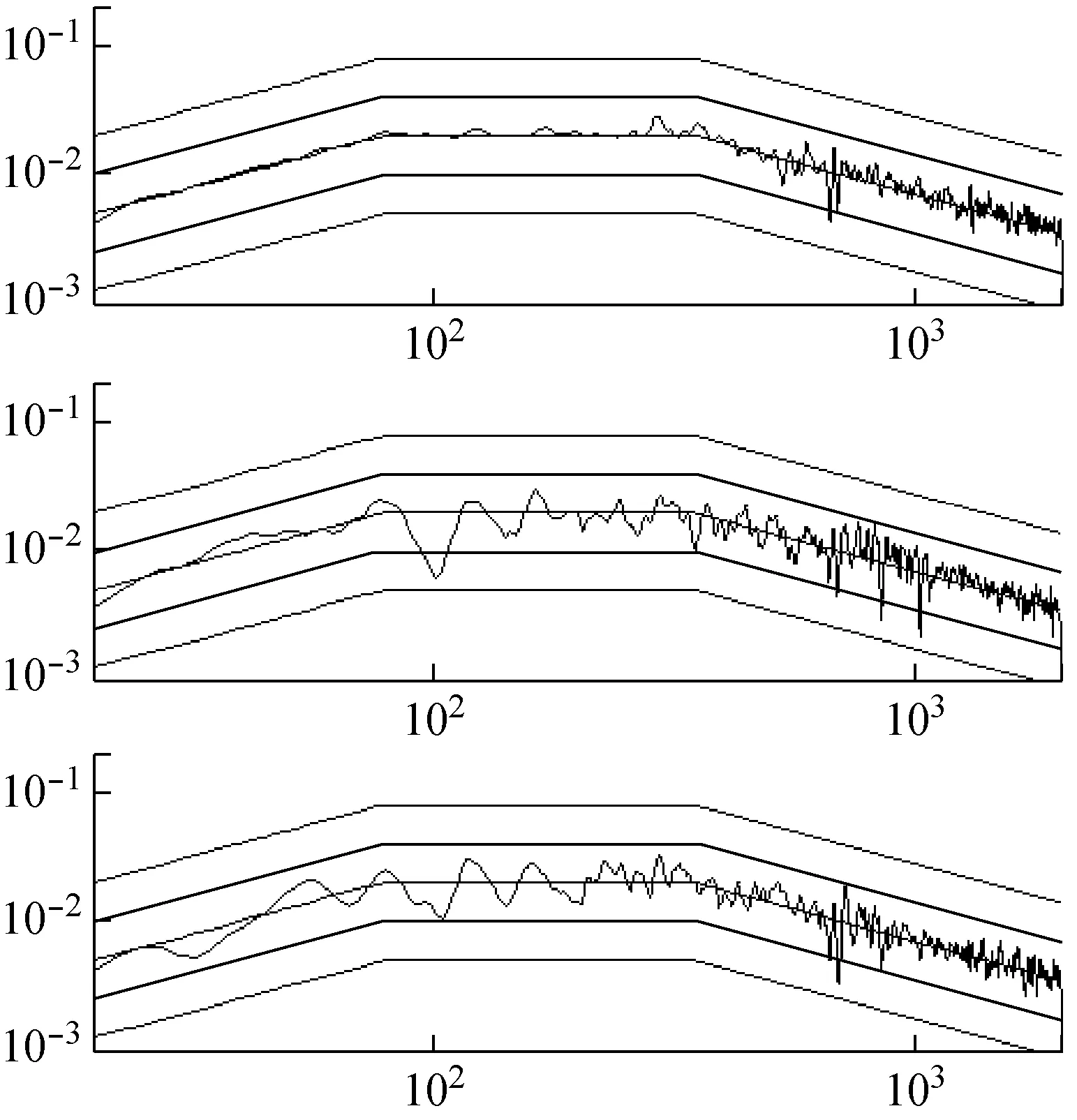
图14 振动控制曲线
试验中还发现,随着冲击试验量级的增加(振动量级不变),冲击信号的提取精度将得到显著提升,这与冲击信号本身的信噪比有关,信噪比越大,信号分离的精度越高。
猜你喜欢
基层中医药(2021年12期)2021-06-05 06:56:26
福建质量管理(2020年16期)2020-09-09 02:56:00
智族GQ(2019年9期)2019-10-28 08:16:21
中国特种设备安全(2019年7期)2019-09-10 07:31:04
英美文学研究论丛(2018年1期)2018-08-16 03:00:06
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
纺织科学研究(2017年6期)2017-07-03 12:14:15
中国工程咨询(2017年12期)2017-01-31 02:56:54
安徽地质(2016年4期)2016-02-27 06:18:21
安全(2015年1期)2016-01-19 06:19:07