多巡飞弹侦察/打击/评估一体协同方案设计*
2019-02-14 06:15王鹏飞
火力与指挥控制 2019年12期
郝 峰,王鹏飞,张 栋
(1.西北工业大学航天学院,西安 710072;2.西北工业大学空天飞行器设计实验室,西安 710072;3.中国兵器工业集团第二○三研究所,西安 710065)
0 引言
网络化巡飞弹是一种多用途、智能化、网络化的小型低成本空地精确打击武器。具备在复杂战场环境下多弹智能组网、自主搜索识别目标、区域压制、精确打击和毁伤评估等作战能力,可满足未来信息化战争对空地精确打击武器能力的需求。
网络化巡飞弹最重要的作战模式是协同作战,通过多架巡飞弹相互配合来完成复杂的作战任务。多弹对目标区域的协同搜索与协同目标分配是协同作战技术的重要组成部分。随着现代装备信息化、智能化的发展,“发现”意味着“攻击”,“攻击”意味着“摧毁”。因此,发现目标是作战的首要问题,在发现目标的基础上,对目标实施摧毁和毁伤评估。
在目前的研究中,直接针对巡飞弹协同作战方面的研究较少,然而巡飞弹的作战模式与察打一体攻击型无人机类似,因此,察打一体攻击型无人机协同作战任务规划方面的研究对于探究巡飞弹协同作战策略,具有重要的指导意义。针对无人机的任务规划与协同航迹,文献[1-9]分别从不同的应用层面进行了算法研究与分析。对于无人机目标区域覆盖搜索策略包括随机搜索、平行搜索、网格搜索等[10-11],文献[12]建立了无人机协同搜索框架,包括两层:在线环境学习和在线轨迹规划。文献[13-14]中分析了基于面积的多边形区域划分方法,并用于多无人机搜索区域的指派。文献[15-16]研究了采用“Z”型扫描线的方式进行目标区域的覆盖。文献[17-18]研究了多无人机区域覆盖的搜索策略以及航迹规划算法。
本文提出了一种侦察/打击/评估一体化的协同策略,首先,借鉴文献[11]的区域覆盖搜索方法,建立多弹协同区域搜索策略;其次,侦察完成的同时,采用改进的A*算法对侦察区域中的目标进行攻击,在攻击的同时,能够对攻击的效果进行实时评估;最后,对整个巡飞弹多任务模式进行了仿真分析。
1 问题描述
1.1 协同任务描述
投放平台将巡飞弹集群投递在需要执行任务的区域上空,各个巡飞弹按照预先规划好的航迹各自执行侦察任务。当发现目标时,巡飞弹需要重新规划航迹,攻击目标,并且需要对打击效果进行评估,实现“即打即评估”,如图1 所示。为了完成协同攻击、满足察打一体任务,要求各巡飞弹在任务时间上高度协同,使得各相关任务互不冲突,连续、有序地进行。针对此需求,本文提出了一种基于预设航迹点的协同策略。
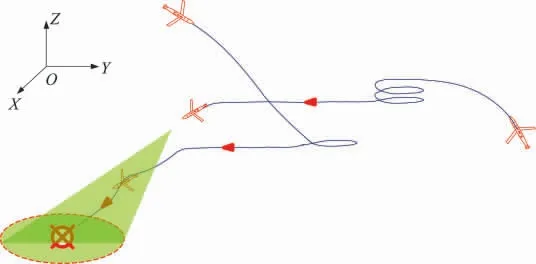
图1 协同任务假想场景
1.2 协同方案设计
为了便于问题描述,本文以两巡飞弹协同实现“即打即评估”的任务为例进行说明,对于多弹协同攻击等任务模式,其求解思路一样。
场景描述:假设巡飞弹LM1、LM2 由投放平台投放,首先经过爬升、转弯调整到达指定搜索区域;其次按预先规划航迹完成区域搜索,在巡飞弹LM1、LM2 分别到达最后一个航路点的时候,需要将目标信息传递回指控平台,指控平台将任务指令发送到巡飞弹LM1、LM2。假设巡飞弹LM1 攻击区域1 中目标,巡飞弹LM2 需要在LM1 打击的同时,对毁伤效果进行实时侦查监视。为了实现“即打即评估”的效果,巡飞弹之间必须满足LM1 到达目标的同时LM2的导引头视场覆盖目标。
求解思路:为了实现在巡飞弹LM1 打击目标的同时,巡飞弹LM2 能够监视打击效果,需要在LM1接收到任务指令到打击目标的这段时间内,LM2 能够飞行到目标上空,而且其目标在导引头的视场之内,这就需要两弹在两个任务模式之间满足时间协同。本文提出了基于预设航迹点的协同策略,如图1所示,当巡飞弹LM1、LM2完成区域侦察之后,可以局部在线规划预设一个航迹点,通过调整该航迹点来实现时间协同。
结合下页图2,给出了巡飞弹整个任务的流程,每段航迹的时间定义如下:
1)巡飞弹LM1、LM2爬升到某高度所需要的时间分别为tclimb(LM1)、tclimb(LM2);
2)巡飞弹LM1、LM2从爬升顶点调整方向到任务区域进行遍历搜索起始点所用时间分别为tadjust(LM1)、tadjust(LM2);
3)巡飞弹LM1、LM2对任务区域1 和2 进行遍历搜索所用时间分别为tergodict(LM1)、tergodict(LM2);
4)巡飞弹LM1、LM2遍历搜索结束后调整方向到达预定点时间设计为tdesign(LM1)、tdesign(LM2);
则巡飞弹LM1、LM2完成任务的总时间分别计算如下:

通过前面的分析,实现巡飞弹LM1 打击目标的同时,LM2 能够实时监视到打击效果,需要满足如下约束条件:

针对式(3)的约束,本文提出了基于预设航迹点的协同策略来实现多弹多任务的时间协同。
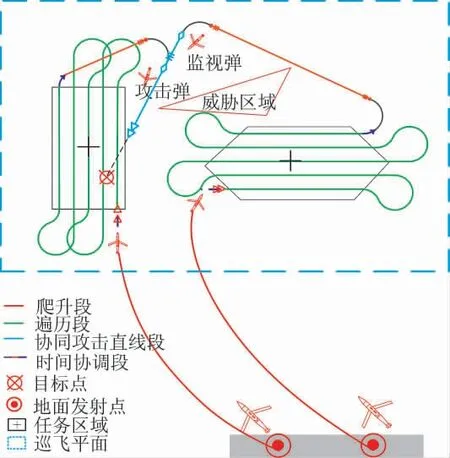
图2 侦察打击评估任务模式
2 区域侦察航迹规划方案设计
区域侦察最常用的方法是基于平行搜索策略的区域覆盖搜索。与机器人覆盖搜索不同,巡飞弹存在最小转弯半径约束,需要在待搜索区域外部进行转弯飞行,来实现对区域的全覆盖,然而这种方法增加了额外的航迹。如果转弯次数较多,可能导致巡飞弹侦察时间过长,油耗不足,从而使得任务失败。针对这一问题,文献[11]采用了Z 字形平行搜索对搜索区域中各关键点进行了分析,详细讨论了搜索起始点、转弯关键点、搜索终点的选取,但是没有给出转弯关键点在凸多边形两条边过渡时的特殊情况下转弯关键点选择方法的分析。然而,在真实场景中侦察区域是不规则的更接近多边形模型[17],因此,本文将针对凸多边形多转弯关键点和搜索终点这种特殊情况进行详细分析。
当转弯遇到绕过凸多边形顶点的其中一种情况如图3 所示,为了保证所有区域都能覆盖到,调头点的横坐标选取为转弯过程中绕过凸多边形顶点的横坐标X3,同理,针对其他转弯过程中绕过顶点情况时的原则,同样可以使调头点或者结束点的横坐标选择为凸多边形顶点的横坐标。
这种特殊情况下的转弯关键点的确定方法为:当飞行方向为X 轴正(负)方向时,搜索边界与当前直线航路的交点X2、与当前探测上边界的交点X4、与当前下边界的交点X1、凸多边形顶点X3,这4 个点的横坐标最大(小)值应该被选取为调头点或结束点的横坐标,即:


图3 区域覆盖搜索策略
3 基于改进A*算法的打击/评估航迹规划方法
A*算法是一种启发式最优搜索算法,其评价函数为:

式中,g(M)表示从初始节点到当前节点M 的最小路径代价的估计值;h(M)表示当前节点M 到目标节点的最小路径代价的估计值;a 和b 代表对真实代价和预计代价的加权,一般取值为1;f(M)表示从初始节点经M 到目标节点的最小路径代价的估计值。
传统A*算法将规划空间划分为网格的形式如下页图4 所示,通过起始节点所在网格向相邻网格不断扩展,以代价函数f(M)对扩展节点进行评价,寻找从起始点到目标点不断相邻的网格。网格限制了节点的扩展方向,而将网格中心点连接而成的路径很有可能不是巡飞弹可飞的最优路径,不符合巡飞弹航迹规划中航迹快速生成的要求,因此,需对A*算法改进。

图4 传统A*算法示意图
本文在文献[8]的基础上,对A* 算法作了改进。以使A*算法可以快速生成飞行器可飞行航迹点。该算法以飞行器初始起点信息(x0,y0,z0)作为A*搜索算法的扩展起始点,其中0 为飞行器在扩展起始点的速度矢量方向。将飞行器在单位时间内根据运动方程求解的位置信息变化进行扩展,同时考虑飞行器最大转弯角的约束,扩展的每个航迹点(A、B、C、D、E)都是飞行器在单位时间内可能到达的位置,而每个扩展航迹点都具有上述3 个信息(x,y,)。选择评价函数min(fA,fB,fC,fD,fE)最优作为下一个航迹扩展点,改进A*算法对航迹点的扩展如图5所示,其中fD最小,因此,选择D 点作为飞行器航迹的第1 个扩展点。
4 仿真实验与结果
4.1 仿真条件
仿真实验环境为ThinkPad PC,CORETMI5,CPU(1.80 GHz),4 G 内存。表1 给出实验中巡飞弹相关参数。

表1 巡飞弹仿真参数
4.2 协同约束求解
根据1.2 节中介绍的协同策略,时间协同可以通过调整巡飞弹攻击角度θ 和瞄准距离Laim来实现,如图5 所示。
巡飞弹LM1、LM2 从区域侦察结束点S1和S2通过调整方向飞向目标点位置,整个航程计算公式如下:

图5 预设航路点协同控制示意图
式中,LBA、LAT为直线段,LBA为满足导引头探测视场约束的距离。
假设巡飞弹以匀速飞行,LM1、LM2 分别从区域侦察结束点S1和S2飞到瞄准线上预设航迹点A、B的飞行时间为:

在实际情况中,需要考虑数据链通信时间约束、飞行环境对飞行速度的影响等因素,因此,在实际航迹飞行中,可以调整预设航迹点A、B 的位置,也就是调整攻击角度和瞄准距离来满足下面方程时间约束:

通过以上分析,方程中存在两个未知数即巡飞弹攻击角度θ 和瞄准距离Laim,为了能快速求解满足条件的预设航迹点A、B 位置,实现在线规划,根据威胁区域等约束条件,以及巡飞弹攻击角度有一定范围,可以预估或者设定巡飞弹攻击角求解瞄准距离Laim,从而可求得预设航迹点A、B 的具体位置。
4.3 仿真结果与分析
根据实战需求,本文对侦察/打击/评估一体的协同作战模式进行了仿真分析。假设巡飞弹发射后,爬升段和调整进入遍历搜索阶段所用时间相同,巡飞弹遍历搜索区域参数如表2 所示,巡飞弹各个飞行阶段时间如下页表3,根据威胁区域位置选择巡飞弹攻击角度θ=60°,选择瞄准距离Laim=7 km 时,巡飞弹执行任务时间相同,因此,在这种情况下可以达到打击即评估的作战要求,结果如下页图6 所示。

表2 搜索区域信息

表3 巡飞弹各个飞行阶段时间
图6 直观地给出了预设航迹点的策略,可以看到,通过调整遍历完成后飞行器飞行的一段航迹SkAk,改变不同飞行器到达目标点的时间差Δt,通过改变Δt 保持弹与弹之间的协同关系,保证协同攻击或者侦查打击协同的目的。这种方法很好地解决了打击和毁伤评估时间上的协同,有效地实现了多弹协同。本文对于SkAk段轨迹设计,直接让飞行器在覆盖搜索完成后沿原来方向飞行,这是目前容易想到的也是比较简单的一种航迹延伸。对于SkAk段的后续设计是以后工作的研究重点,同时也是这种方案后续发展的关键。
5 结论
本文提出了一种基于预设航迹点的多巡飞弹多任务协同策略。通过对作战任务模式的分析,建立了基于时间的协同约束模型。选择巡飞弹攻击角度和瞄准距离为协调变量求解预设航迹点,实现了多任务模式时间上的协同。考虑实际情况,给出了“即打即评估”的仿真场景,结果表明本文提出的协同策略能够满足多任务协同要求,验证了协同策略的有效性。对于预设航迹点的在线规划算法将是下一步研究的重点。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
甘肃教育(2021年12期)2021-11-02
雷达科学与技术(2020年4期)2020-09-11
中学课程辅导·教学研究(2017年28期)2018-02-03
中学数学杂志(初中版)(2017年2期)2017-05-09
文学教育·中旬版(2012年3期)2013-02-01