
基于VMD多尺度熵和ABC-SVM的装甲车辆识别
2019-01-25 10:36:14樊新海石文雷张传清
装甲兵工程学院学报 2018年6期
樊新海, 石文雷, 张传清
(陆军装甲兵学院车辆工程系, 北京 100072)
在新型作战体系下,对地面战场目标(如坦克、装甲车等)的准确识别是近距离作战中赢得信息优势和战场控制权的有效手段,在现代战争中有着重要的军事价值[1]。被动声识别也称为被动式声雷达,与传统雷达探测技术相比,有着抗干扰、低功耗、不易被发现等优点,可以弥补雷达低空探测盲区这一不足[2]。
噪声信号的特征提取和分类是装甲车辆声识别的主要环节,装甲车辆的噪声信号具有非线性、非平稳的特性,其特征提取与识别方法可以借鉴语音识别。孙国强等[3]将语音信号的特征梅尔频率倒谱系数(Mel-Frequency Cepstral Coefficients,MFCC)作为装甲车辆噪声信号的特征,通过分类实验证明了MFCC能够有效提取出装甲车辆噪声信号的特征信息,但其特征维数较高,运算量较大。笔者等[4]将噪声信号经验模态分解(Empirical Mode Decomposition,EMD)后提取的能量比作为特征向量,并将支持向量机(Support Vector Machine,SVM)作为分类器,实现了对4种装甲车辆的识别。EMD分解过程中存在模态混叠的现象,这会给特征提取带来一定的误差。同时,分类器SVM的核心参数均采用经验值,无法实现最高的识别率。
鉴于此,笔者将装甲车辆噪声信号模态分解得到的本征模态函数(Intrinsic Mode Funation,IMF)进行多尺度模糊熵(Multi-scale Fuzzy Entropy,MFE)计算,得到多尺度模糊熵特征,并将利用优化算法得到的支持向量机模型用于装甲车辆的声识别,对比并分析识别结果,进而得到最优模型。
1 目标声信号的获取与特性分析
以典型的4种履带式装甲车及3种坦克为识别对象,主要采集车辆原地发动(静止工况)和在正常路况下行驶(行驶工况)产生的排气噪声信号,以及夹杂履带与地面的冲击噪声信号,采集距离为3~5 m。根据装甲装备特点可知:坦克以及履带式装甲车的动力装置均为四冲程内燃机,发动机排气噪声爆发频率f与发动机转速n具有如下关系[5]:
(1)
式中:z为发动机气缸数。
在信号采集过程中,坦克及装甲车的最高转速均不超过3 000 r/min,结合式(1)可知其排气噪声理论爆发频率在几百赫兹范围内。装甲车辆行驶时产生的履带冲击噪声频带较宽,一般<4 kHz。结合以上因素,将噪声信号的采集参数设置为:采样频率8 kHz;采样点数32 768;采样时间4.096 s。
根据车辆的具体行驶状况,采集每种车型多种工况下的噪声信号,其噪声采集车型及其工况如表1所示。其中:高转速为1 300~1 600 r/min,中转速为1 000~1 300 r/min,低转速为800~1 000 r/min。
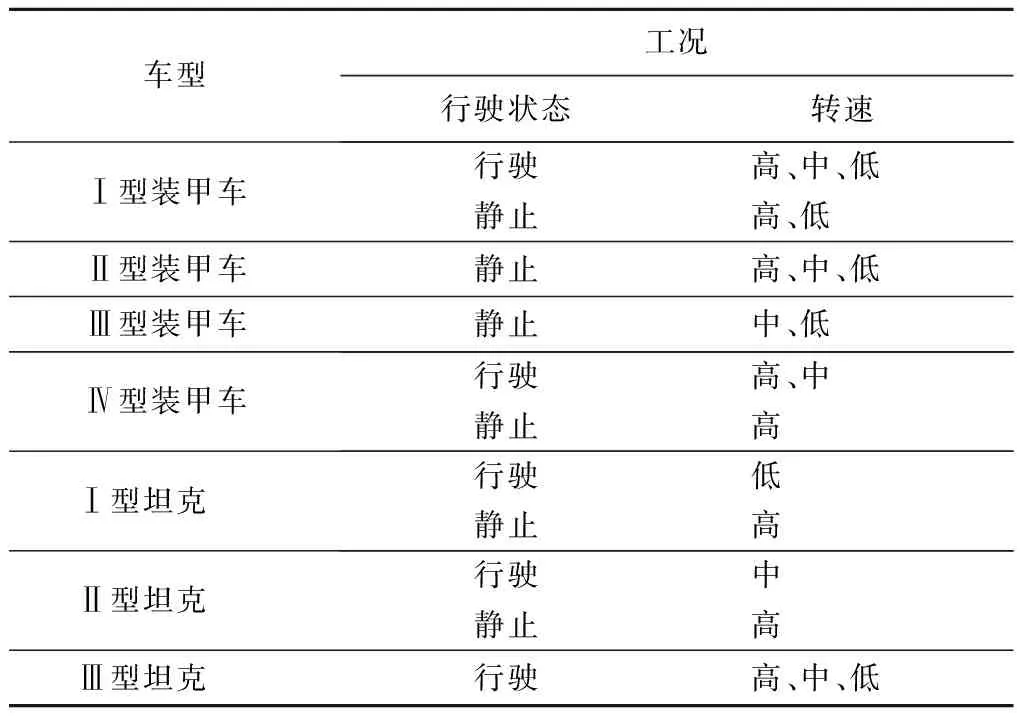
表1 噪声采集车型及其工况
将采集的噪声信号进行频谱分析,图1、2分别为Ⅰ型装甲车和Ⅱ型坦克的目标噪声信号及其功率谱。可以看出:噪声主要能量均集中在<1 000 Hz的低频段。由于噪声信号在低频段具有明显差异性,这一特点可以作为分类的关键依据。
2 噪声信号的VMD-MFE提取
2.1 VMD原理
变分模态分解[6](Variational Mode Decomposition,VMD)是一种自适应信号处理方法,其在EMD和局部均值分解(Local Mean Decomposition,LMD)基础上有效减少了模态混叠现象,具有较好的理论基础。VMD实质上是多个自适应Wiener滤波组,具有更好的鲁棒性[7]。VMD整体框架是变分问题,根据预设模态分量个数对原始信号p进行分解,得到本征模态函数。
VMD变分模型为
(2)
式中:{uk}={u1,u2,…,uK},为分解得到的K个模态分量;{ωk}={ω1,ω2,…,ωK},为各模态分量中心频率;∂t表示对t求偏导运算;δ(t)为单位脉冲函数。
利用交替方向乘子法(Alternate Direction Me-thodof Multipliers,ADMM)可得到各模态分量在频域内的更新表达式,为
(3)
同样,在频域对中心频率求解,得到ωk的更新表达式为
(4)
2.2 多尺度模糊熵
多尺度熵(Multi-Scale Entropy,MSE)是指不同尺度的样本熵,其从不同尺度衡量时间序列的复杂性,克服了传统的基于单一尺度样本熵的缺陷,能反映时间序列更深层的模式信息[8]。模糊熵(Fuzzy Entropy,FE)[9]采用指数函数代替单位阶跃函数,克服了相似性度量的突变,能更好地突出信号间的差异。因此,以模糊熵替换样本熵,得到多尺度模糊熵,其计算步骤如下:

(5)
式中:τ为尺度因子,一般为正整数。
2) 计算各尺度因子下粗粒化序列的模糊熵,其计算公式为
MFE(X,τ,m,r)=FE(y(τ),m,r)。
(6)
式中:m为嵌入维数;r为相似容限。
2.3 VMD-MFE提取步骤
在处理非线性信号时,常将时频信号处理方法与多尺度熵相结合而得到多尺度熵的特征值。与未经处理的原始时频信号相比,该特征值更能体现时频信号的特征。将装甲车辆噪声信号先进行VMD分解,对分解得到的IMF时间序列X进行粗粒化处理,并提取多尺度模糊熵,得到多尺度模糊熵特征(VMD-MFE),其具体步骤如图3所示。
3 人工蜂群算法优化的支持向量机
3.1 人工蜂群算法
人工蜂群(Artificial Bee Colony,ABC)算法是一种模拟蜂群采蜜过程的群体智能算法[10]。引领蜂、跟随蜂和侦察蜂为3种不同工种,它们会根据各自分工协同完成采蜜过程各阶段任务,并实时收集和共享蜜源,从而找到最佳蜜源的位置。
3.2 ABC-SVM
研究[11]表明:SVM作为分类器使用时,误差惩罚因子C和核函数参数g是其分类性能的主要影响因子。以径向基为核函数的SVM,利用人工蜂群算法对C和g进行参数寻优,其优化过程如下:
1) 初始化参数。设置SVM中C和g的搜索范围,在搜索范围内随机产生N组C和g,则第n个初始蜜源位置为Xn(n=1,2,…,N);同时,初始化蜂群数量、蜜源被开采次数以及同一蜜源被开采极限。
2) 引领蜂产生蜜源。在蜜源附近,引领蜂按照
Vn=Xn+rand(-1,1)·(Xn-Xk′)
(7)
随机产生新蜜源并开展邻域搜索。式中:Vn为新产生的第n个蜜源位置;k′=1,2,…,N,为随机指定个体,且k′≠n。
3) 跟随蜂选择蜜源。跟随蜂到达蜜源后,同样按照式(7)对蜜源进行一次邻域搜索,并依照
(8)
选择蜜源。式中:Pn为第n个蜜源被选择的概率;Fn为第n个蜜源的适应度,也就是蜂群算法的寻优目标,在此指蜜源坐标代入SVM得到分类准确率。
4) 放弃蜜源重新搜索。规定蜜源最大采集次数为M,当采集次数>M而仍未找到最优值时,放弃蜜源,并将与该蜜源对应的引领蜂转换为侦察蜂,按照
Xi=Xmin+rand(0,1)·(Xmax-Xmin)
(9)
产生新蜜源并重新搜索:否则,转到步骤2)。式中:Xmax和Xmin分别为搜索空间的上限和下限。
5) 判断是否满足最大迭代次数。若满足,则跳出循环,输出结果;否则,转到步骤2)。
4 实验及分析
4.1 特征提取实验
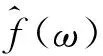
从每种车型采集的原始信号中截取长度为1.024 s的信号,作为特征提取的样本信号。由于VMD算法相当于自适应维纳滤波器组,当模态分量个数较少时,原始信号中的一些重要信息将被滤掉丢失;当分解模态分量个数较多时,相邻模态分量的中心频率则会相距较近,容易产生频率混叠。因此,在对样本信号进行VMD分解前,要先确定模态分量个数K。以I型装甲车为例,对其样本信号进行VMD分解,不同K值对应的中心频率如表2所示。可以看出:当K=6时,中心频率1 646、1 938 Hz相接近,可能会出现模态混叠。因此,选K=5较为合适。
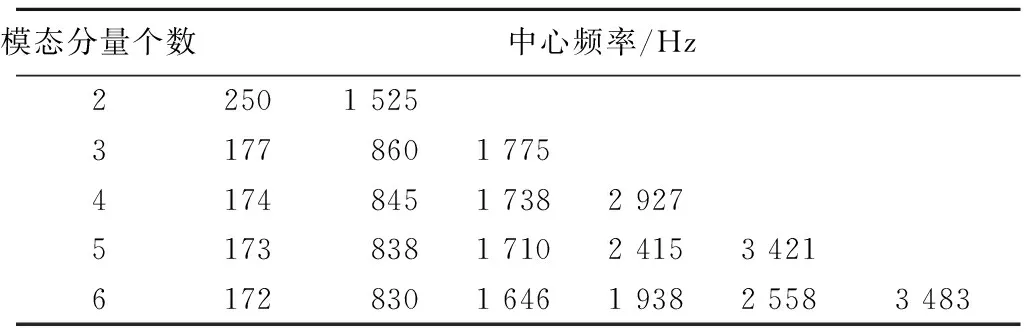
表2 不同K值对应的中心频率
VMD分解中的另一个影响因素是惩罚参数a。为保证VMD分解过程中具有较好的去噪能力和细节保留度,取a=1 000。以Ⅰ型装甲车静止、高转速条件下的样本信号为例进行VMD分解,产生的5个IMF分量如图4所示。
计算各个模态MFE的值,其中嵌入维数m与样本数据长度有关,一般样本数据越长,m越大。本文中噪声样本信号点数为 8 192,参考文献[12],取m=2;一般取相似容限r=(0.15~0.25)δ,其中δ为原始样本的标准差。尺度因子会影响特征维数:若特征维数过小,则不足以体现样本的特征;若特征维数过大,则会造成分类耗时过长。因此,本文取τ=3。综上考虑,VMD-MFE方法提取的特征维数为15。
为了验证VMD分解的优越性,分别对样本信号进行EMD和集合经验模态分解(Ensemble Empiri-cal Mode Decompostion,EEMD)分解,并将分解模态的MFE值作为特征向量。由于EMD和EEMD需要多层分解,若计算所有模态的MFE值,则运算量较大。为保持与VMD分解过程的一致性,取2种分解结果的前5个模态,计算得到的15维EMD-MFE和EEMD-MFE变化曲线如图5所示。可以看出:当装甲车型号不同时,与基于EEMD-MFE和EMD-MFE方法相比,基于VMD-MFE方法得到的噪声信号特征值的差异性较大,说明经VMD分解得到的5个模态的多尺度模糊熵可区分度较高,而经EEMD和EMD分解得到的多尺度模糊熵的可区分难度较低。这也说明VMD分解较好地克服了EMD和EEMD分解中存在的模态混叠现象。
4.2 噪声分类实验
4.2.1 特征筛选
将SVM作为分类器,用以分析3种特征值对装甲车辆噪声识别准确性及分类时间的影响。每种车型分别从3种特征值中取150组样本作为训练集,100组样本作为测试集,每种特征值的训练集总样本数为1 050,测试集总样本数为700。根据经验,取惩罚因子C=80,核函数参数g=2。将选取的数据集输入到SVM中进行分类实验,其识别结果如表3所示。可以看出:当识别时间相同时,与EMD-MFE和EEMD-MFE相比,以VMD-MFE为特征值的SVM识别率较高,说明VMD具有更好的自适应能力,能够有效地分离出噪声信号中的特征量。因此,选择VMD-MFE作为装甲车辆噪声识别的特征值。
表3 3种特征值识别结果
4.2.2 算法优化结果分析
采用引力搜索算法(Gravitational Search Algorithn,GSA)、ABC算法和布谷鸟搜索(Cuckoo Search,CS)算法三种群智能优化算法对SVM进行优化,迭代次数均为30次,得到参数优化的分类器模型GSA-SVM、ABC-SVM、CS-SVM。将VMD-MFE分别输入到3种模型中进行识别实验并对比,其误差率随迭代次数的变化趋势如图6所示。可以看出:与GSA、CS算法相比,ABC算法在参数寻优的过程中具有最快的收敛速度,其在第6代就达到了最低分类误差率5.85%。这说明在以VMD-MFE为特征值时,ABC算法对SVM的优化效果最好。
表4和图7分别为4种分类器模型识别结果对比和ABC-SVM的分类结果。可以看出:与GSA-SVM、CS-SVM相比,ABC-SVM分类器模型具有更高的识别率,总体识别率达到了94.14%;与SVM相比,以ABC-SVM为分类器模型时对Ⅰ、Ⅱ型坦克的识别率有显著提高。上述结果说明:ABC算法对SVM的核心参数具有良好的寻优能力,能够得到使SVM达到最优识别率的参数组合。

表4 不同分类器模型识别结果 %
5 结论
笔者建立了一种以VMD多尺度熵为特征值,以ABC算法优化的SVM为分类器的装甲车辆噪声识别模型,其总体识别率达到94.4%,具有较好的识别效果。实验分析结果表明:以VMD-MFE为特征值的识别率较高,说明VMD分解效果优于EMD和EEMD;ABC的参数寻优效果优于GSA和CS算法,具有较快的收敛速度和较强的寻优能力。
为了提高装甲装备声识别的应用可行性,下一步应丰富不同车型的噪声样本库,并对3种算法优化效果进行深入对比分析,以对ABC算法进行改进,并进一步提高装甲车辆声识别准确率。
猜你喜欢
贵州科学(2023年6期)2024-01-02 11:31:56
林业与生态(2022年5期)2022-05-23 01:16:51
数学物理学报(2021年5期)2021-11-19 07:01:12
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:40
汽车维修与保养(2021年12期)2021-03-08 09:34:02
高中生·天天向上(2018年1期)2018-04-14 09:24:38
计算机测量与控制(2017年6期)2017-07-01 16:24:35
价值工程(2016年36期)2017-01-11 19:59:59
东北电力大学学报(2015年1期)2015-11-13 05:20:25
机械工程师(2015年9期)2015-02-26 08:38:29
