
燃烧假人衣下空气层的三维现场扫描测量与表征
2019-01-22 02:55王敏,李俊
纺织学报 2019年1期
王 敏, 李 俊
(1. 东华大学 服装与艺术设计学院, 上海 200051;2. 东华大学 现代服装设计与技术教育部重点实验室, 上海 200051)
人体皮肤和服装内表面间的衣下空气层是影响人-服装-环境系统热传递的重要因素,在利用燃烧假人测试技术进行服装热防护性能研究中,常常需要获取衣下空气层厚度及分布。三维扫描是目前获取衣下空气层厚度的常用方法。Kim[1],Song[2], Mah[3-4]等均采用三维扫描仪获得防火服衣下空气层厚度并分析了衣下空气层厚度与皮肤烧伤的关系。由于传统三维扫描仪的应用局限,如需要在暗室中进行、结构复杂、体积庞大等,都不适合安装在有燃烧假人、喷火装置、火焰存在的燃烧室内,因此扫描通常在燃烧测试前在三维扫描室内完成。由于服装面料的柔性特征,异地测量、重复穿脱难以保证扫描时的衣下空气层厚度及分布与燃烧测试时完全相同,基于该测量数据探讨衣下空气层与热防护性能之间的关系会存在较大误差。另外热暴露过程中织物可能发生收缩导致热暴露后服装难以完整地脱下来,因而也无法获取热暴露后服装的衣下空气层变化。解决该问题的关键是要实现燃烧室内现场扫描。
衣下空气层厚度表征方面,由于燃烧假人表面装有热流传感器,通常还需要提取传感器对应位置的衣下空气层厚度。文献[1,3]利用逆向工程软件对三维数据进行建模,再将裸体假人和着装假人模型对齐,过传感器位置截取水平切面,计算传感器对应位置同心截面线之间的距离,即为空气层厚度。文献[5]利用偏差检测软件通过三维比较和创建注释获得传感器对应位置衣下空气层厚度,但无法做到在三维空间中对传感器进行准确定位,并且同文献[1,3],都需要逐个传感器提取,如果测试样本较多,操作费时费力,且准确性不能保证。
为解决以上问题,本文利用Kinect深度相机,结合“东华火人”燃烧室布局,通过在燃烧室内构建三维扫描平台,实现燃烧室内现场扫描,利用Geomagic逆向工程软件对衣下空气层进行表征,通过实现假人表面传感器在三维空间的准确定位,提出了一套快速有效提取传感器对应位置衣下空气层厚度的方法,以期为准确分析衣下空气层厚度与热防护性能的关系提供关键技术手段。
1 三维现场扫描的实现
1.1 扫描仪的选择
实现燃烧室内现场扫描的关键是寻求一款易移动、易安装且对扫描背景和光线没有严格要求的设备。Mincrosoft Kinect最初是由美国微软公司开发作为游戏外设使用,由于该设备可在捕获彩色视频的同时,同步输出像素点到摄像机的距离,即深度图像,不少研究者将其应用于三维扫描[6-8]。Kinect由RGB摄像头、红外线发射器以及红外摄像头构成,如图1所示。RGB摄像头用来收集RGB数据,最大支持1 280像素×960像素成像;红外线发射器提供红外光源;红外摄像头用来采集景深数据,最大支持640像素×480像素成像。红外线发射器以及红外摄像头构成Kinect的扫描组件。

图1 Microsoft Kinect的构成Fig.1 Construction of Microsoft Kinect device
Kinect的有效扫描范围为0.5~3 m,在这个范围内,物体越靠近Kinect,获得的深度图像噪声越少,但同时扫描范围也变小,若要采集全身人体三维数据一般需要多个Kinect装置同步扫描。理论上围绕人体排列的Kinect装置越多扫描越完整,但同时也会增加扫描重叠区域,给系统校准和点云数据运算带来很大问题。根据扫描距离、扫描范围和扫描精度的关系,单台Kinect比较适合用来获取单面半身人体图像,因此,要获取全身人体图像最好采用4个Kinect装置,分别同步扫描人体正面、背面的上半身及下半身,这样既可保证扫描的精度和完整性,又可减小重叠区域,避免多台Kinect之间相互干扰。
本文使用的由美国Fabrate 公司开发的三维人体扫描仪KBI(Kinect body imaging system)由4个Kinect传感器构成,每2个为1组,固定在1根立柱上,2组Kinect传感器同时拍摄,可分别获得人体前后上下的深度图像。扫描时红外发射器向目标环境投射红外光源,红外线被被测物体反射,红外摄像机获取反射图案,再根据反射图案进行编码,计算出像素点到摄像机的距离。KBI可在1 s内完成全身人体扫描,最大扫描精度1 mm,点密度大于27 pts/cm2。该扫描仪结构简单,测量精度高,对被测物体的颜色和纹理几乎没有要求,对扫描背景、环境光线也不敏感,适合安装在燃烧室内。
1.2 “东华火人”燃烧室布局及系统特点
“东华火人”燃烧假人测试系统由燃烧假人本体、信息采集及传输系统、火焰产生及气体输配系统、燃烧实验室及配套设施、燃烧假人整体测控及评价软件平台5个部分构成。燃烧室尺寸为3.6 m×3.6 m×2.4 m。假人放置在燃烧室中央,周围均匀安置6组(12支)燃烧器。燃烧器距离假人本体的距离为0.5 m。根据该布局和尺寸以及燃烧测试时的极端高温环境,传统扫描仪几乎无法安装在燃烧室内。
另外“东华火人”测试系统本身的一些特点[9],也是实现现场扫描的关键。1)假人在假人颈、肩、肘、腕、髋、膝、踝等有关节设置,方便对假人姿势进行定位;2)假人可以围绕中心轴旋转,因此2根固定Kinect传感器的立柱可安放在穿过中心位置的任意直线方向上,不受限于喷火器的位置;3)假人系统的滑移功能使得假人可滑离燃烧室的中心位置,为KBI扫描仪的标定装置提供空间,便于扫描仪的校准;4)假人可调节可定位的关节以及由计算机精准控制的旋转和滑移功能使得假人的位置和姿势在每次扫描时得以准确再现,保证了扫描的重复性和可靠性。
1.3 三维现场扫描的实现
KBI扫描仪的便携式结构和“东华火人”独有的特点,使得扫描仪可以顺利地安装在燃烧室内,如图2所示。由于燃烧时火焰周围温度非常高,为保护扫描仪,制作了2个箱体。箱体外层是铁皮,内层有4 cm厚的隔热毡,隔热毡上覆有一层铝箔。箱体的一面设计有门,燃烧测试时将门关上可以保护扫描仪。另外在箱体底边的角落凿有小孔,便于电源线的进出。
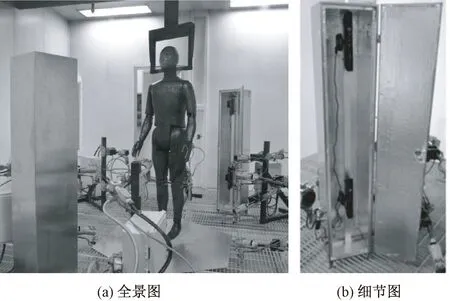
图2 安装在燃烧室内的扫描仪Fig.2 Body scanner installed in flame chamber. (a) Panoramic image; (b) Detail image
2 三维现场扫描流程
为获得燃烧假人衣下空气层厚度,需分别对裸体假人和着装假人进行扫描。本文选择了3件相同的连身型单层防护服用于测试,面料为NomexⅢA,面密度为210 g/m2。
1)裸体假人扫描。为后续提取每个传感器对应位置的衣下空气层厚度,需要确定燃烧假人表面各传感器在三维模型中的位置。这里将直径为3 cm的半圆体贴于假人表面传感器位置处作为标记,如图3所示。扫描时,首先扫描带有标记点的假人,然后将这些标记点去除,再次扫描裸体假人,获得无标记点的裸体假人三维数据。

图3 燃烧假人表面传感器定位Fig.3 Sensor location of the flame manikin. (a) Physical mark; (b) 3-D indentification; (c) Partial enlargement of 3-D indentification map
2)热暴露前着装假人扫描。调整假人关节角度,将实验服穿在假人上,用手轻轻整理不平整之处。相机从正面、背面、侧面对着装假人进行拍照,并将照片作为参考以保证每件实验服都有大致相似的穿着形态。启动扫描仪进行扫描,扫描结束关闭扫描仪保护箱的门,开始进行轰燃测试。
3)热暴露后着装假人扫描。火焰熄灭后,待燃烧室内温度降低,残留气体排出,再打开扫描仪保护箱的门,扫描热暴露后的着装假人。
以上每步扫描过程重复3次,以保证精度和可重复性。若在实验过程中扫描仪位置发生变动,需重新标定。
3 点云数据处理及衣下空气层表征
本文点云数据处理及衣下空气层特征值提取均在Geomagic Control 2014中进行。
3.1 三维模型重建

图4 燃烧假人照片及三维重建模型Fig.4 Photos and reconstructed 3-D models of flame manikin. (a) Nude manikin; (b) 3-D model of nude manikin; (c) Clothed manikin before exposure; (d) 3-D model of clothed manikin before exposure; (e) Clothed manikin after exposure; (f) 3-D model of clothed manikin after exposure
通过扫描获得的点云数据可能存在杂点、噪点,因此需要首先执行删除杂点、去噪、数据重采样等操作对点云数据进行优化,然后将点云数据封装转换成多边形,生成人体曲面模型。再通过对模型进行平滑、填充孔、多边形简化等操作最终实现三维模型的重建[5]。裸体假人、热暴露前后着装假人照片及其对应的三维重建模型如图4所示。
由图4可以看出,三维重建效果与实际非常接近,尤其反应在服装的褶皱形态上,说明基于新建的扫描平台所获得的三维数据具有较高的精度。
3.2 传感器位置的三维标识
将重建的带有标记点的和没有标记点的裸体假人三维模型导入Geomagic Control中。选中带有标记点的三维模型,通过“点坐标”功能,获得每个标记点的X、Y、Z坐标,并在“标签”栏下输入每个标记点名称即对应传感器的编号,再输出文本格式文件。然后在Excel中导入文本格式文件,使标记点名称、X、Y、Z值各为一纵行,再保存为CSV文件,最后将文件名后缀改为.loc,得到标记点在三维空间中的位置集文件。再选中不带标记点的裸体假人模型,通过分析菜单下的“导入位置集”功能,将位置集文件导入,即可得到各传感器位置的三维标识,实现传感器在三维空间的准确定位(见图3(b)、(c))。
3.3 衣下空气层厚度及分布表征
Geomagic Control除了可对点云数据进行处理以外,另一项重要功能便是检测被测物体与参考模型之间的偏差。对于本文研究,参考模型为裸体假人模型,被检测物体则为着装假人模型,2个模型间的偏差即为衣下空气层厚度。
首先导入重建好的无标记点裸体假人三维模型及着装假人三维模型,将裸体假人模型设置为参考对象,着装假人模型设置为测试对象,再将2个模型进行对齐处理。由于扫描中假人姿势和位置可控,偏差较小,因此采用“全局注册”进行对齐。然后执行分析菜单下的“3-D比较”功能得到测试模型和参考模型之间的偏差,并通过色谱图显示模型各处的偏差大小,也即着装假人全身的衣下空气层厚度分布。
基于“3-D比较”结果,利用“报告”菜单下的“创建注释”进行传感器对应位置的空气层厚度提取。注释类型选择“位置”,自动布局选择3.2节中导入的位置集名称,小数位数设置为2,偏差半径设置为15 mm(传感器半径),即可同步快速地提取假人表面100多个传感器对应位置的衣下空气层厚度。
以上操作得到的衣下空气层厚度还包括面料厚度,但由于面料厚度一般很小,计算时可忽略。
4 结果与讨论
4.1 整体衣下空气层厚度
根据3.3节执行“3-D比较”后,计算测试模型和参考模型间所有偏差的平均值,即可得到分布在假人全身的平均衣下空气层厚度。表1示出热暴露前后3件防护服(样本1~3)平均衣下空气层厚度及其变化率。本文燃烧假人测试按照GB/T 23467—2009《用假人评估轰燃条件下服装阻燃性能的测试方法》进行,热暴露时间为4 s,平均热流密度为84 kW/m2,偏差在21 kW/m2以内。
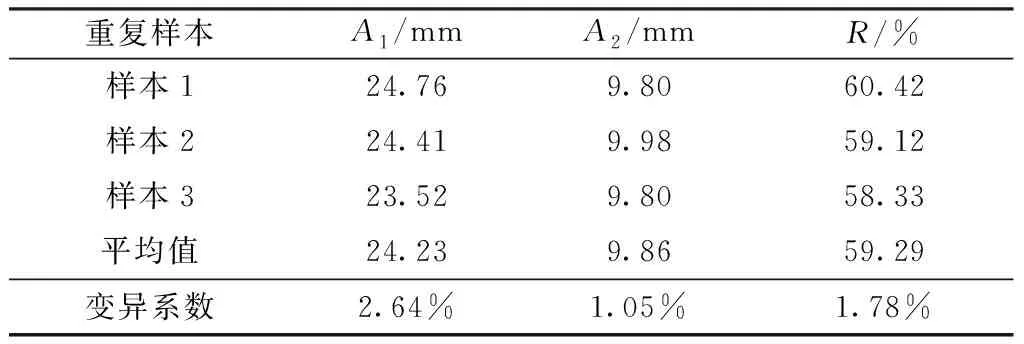
表1 热暴露前后平均衣下空气层厚度及其变化率Tab. 1 Average gap size and change rate before and after exposure
注:A1为热暴露前的衣下空气层厚度,mm;A2为热暴露后的衣下空气层厚度,mm;R为衣下空气层厚度减小率,%。
根据表1可知,对于3个重复样本,热暴露前服装平均衣下空气层厚度为24.23 mm,变异系数小于3%,说明在严格控制穿着方式情况下,相同服装穿着后整体形态基本一致,以往异地测量的方法不会引起较大的整体衣下空气层厚度偏差;热暴露后服装平均衣下空气层厚度在9 mm左右,较热暴露前平均减小了59.29%,说明服装发生了剧烈收缩。另外热暴露前、后平均衣下空气层厚度及其变化率的变异系数均小于3%,说明热暴露测试及三维扫描的重复性较好。
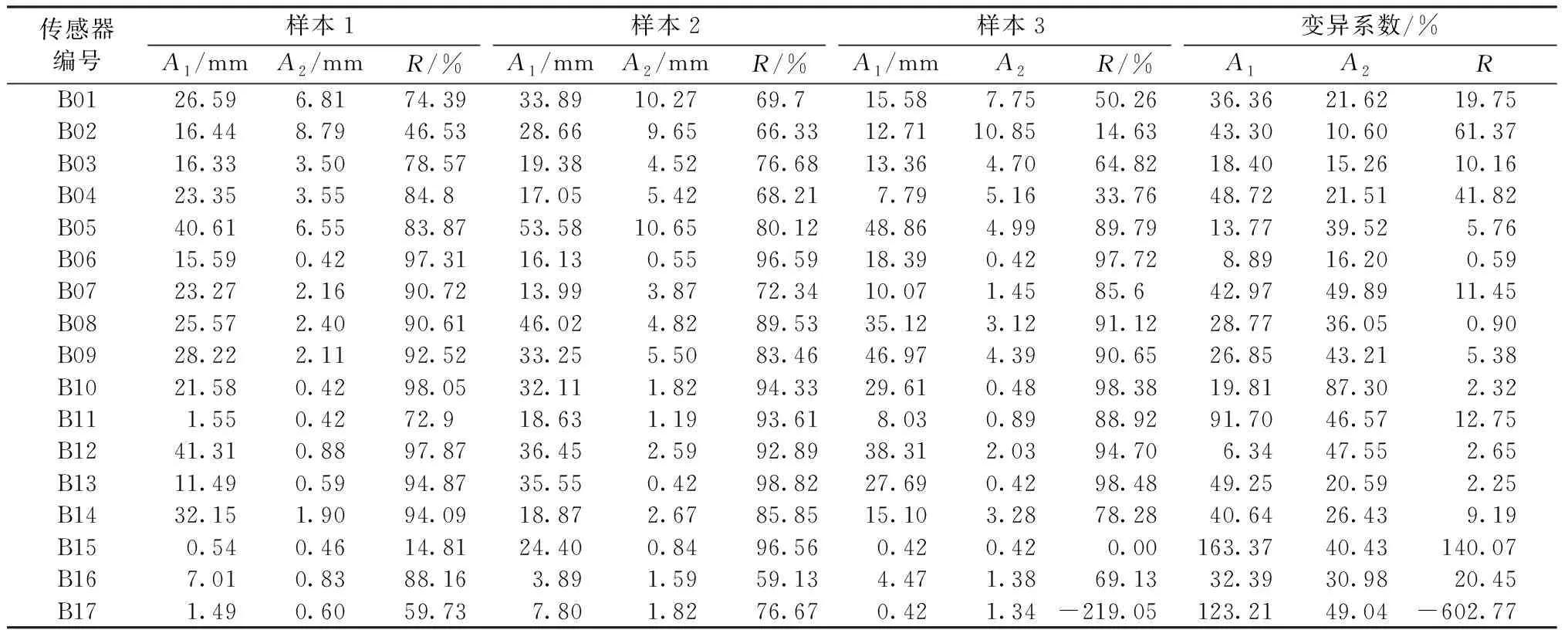
表2 热暴露前后服装局部衣下空气层厚度及其减小率Tab.2 Local air gap thickness and reduction of garment before and after exposure
注:A1表示热暴露前的衣下空气层厚度,mm;A2表示热暴露后的衣下空气层厚度,mm;R表示衣下空气层厚度减小率,%。
4.2 局部衣下空气层厚度
图5示出热暴露前后假人全身衣下空气层厚度分布色谱图。颜色越深,空气层厚度越大,颜色越浅,空气层厚度越小,白色区域表示空气层厚度为负。根据Psikuta的研究[10],由于扫描及数据对齐的固有误差,可认为白色区域服装与假人紧密贴合,空气层厚度为零。由图可看出,衣下空气层在假人周围分布并不均匀,且热暴露前后衣下空气层的分布状态也不同。热暴露前,后腰、臀部、手臂和腿部空气层厚度较大,而肩部、前胸以及上背部等凸起部位的空气层厚度相对较小。热暴露后,各部位的空气层厚度明显减小。前胸、上背、大腿正面几乎都呈现白色,说明这些部位的面料与假人表面紧密贴合,无空气层存在;上臂、臀部、大腿后颜色较深,说明这些位置还有部分残留空气层。
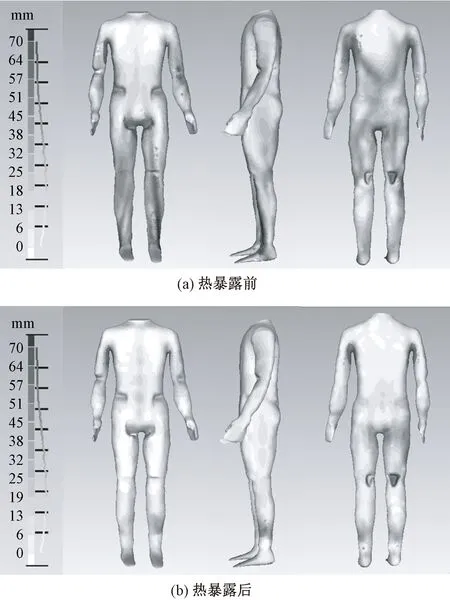
图5 热暴露前后衣下空气层厚度分布Fig.5 Distribution of air gap under clothing.(a) Before exposure; (b) After exposure
表2示出3个重复样本背部17个传感器(B01~B17)对应位置热暴露前、后衣下空气层厚度及其减小率。对比3个重复样本,发现同一传感器位置衣下空气层厚度差异较大,17个传感器热暴露前后衣下空气层厚度平均变异系数分别达到46%、35%;衣下空气层厚度减小率差异同样较大,除去B17传感器,平均变异系数在21%左右。
在文献[3]的研究中,对于女士单层连体服和男士单层连体服,3次重复穿着实验中分别有33%和23%以上的传感器对应位置衣下空气层厚度变异系数大于30%,尤其是手臂和腿部,变异系数更大,研究者指出,这些位置的空气层厚度可能不能很好地反映燃烧测试时服装穿着在假人上的实际情况。
本文研究和前人研究结果表明,尽管扫描过程中对假人的着装方式进行了严格控制,由于面料的柔性特征,服装每次穿着的细部形态并不完全一致,以往异地测量、重复穿脱会造成局部衣下空气层厚度差异,用异地扫描获取的空气层厚度数据代替燃烧测试时的情况并讨论衣下空气层厚度和皮肤烧伤的关系可能会存在误差,证明了现场扫描的优越性和必要性。
5 结束语
衣下空气层是影响人-服装-环境服装系统热传递的重要因素。根据防火服装热防护性能研究中对于衣下空气层的测量需求,本文通过实现燃烧室内现场扫描以及假人表面传感器位置在三维空间的准确定位,提出了一种新的测量和表征燃烧假人着装衣下空气层厚度及分布的方法。
基于该方法对3件热防护服热暴露前后衣下空气层进行测量和表征,结果发现,即使是穿着完全相同的服装,假人局部衣下空气层厚度也存在较大差异。以背部为例,对于3个重复样本,传感器对应位置热暴露前后衣下空气层厚度变异系数的平均值分别达到46%、35%,说明以往异地扫描所得到的数据不能完全代替燃烧测试时的实际情况,尤其是局部衣下空层厚度。
经验证,三维现场扫描方法保证了扫描时的着装状态和燃烧测试时着装状态的完全一致性,并且为无创性获取热暴露后的衣下空气层厚度提供关键技术手段;而通过对假人表面传感器在三维空间准确定位,可以方便快捷地提取假人全身每个传感器对应的空气层厚度, 具有操作简便,减少误差,提高处理效率的特点。本文方法可以推广到其他需要获取假人或真人穿着状态下衣下空气层厚度的研究中,具有普遍适用性。
FZXB
猜你喜欢
纺织学报(2022年4期)2022-04-24
纺织学报(2020年12期)2021-01-05
数学大王·低年级(2020年4期)2020-04-20
时代汽车(2020年23期)2020-03-03
模具制造(2019年3期)2019-06-06
浙江理工大学学报(自然科学版)(2017年5期)2017-09-03
汽车技术(2017年7期)2017-08-08
汽车工程学报(2016年6期)2017-01-11
噪声与振动控制(2016年1期)2016-08-04
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
