
基于微偏振阵列成像的实时天空偏振光导航*
2019-01-15 08:15:34张文静赵立双
传感器与微系统 2019年2期
张文静, 马 龙, 赵立双, 曹 毓
(1.国防科技大学 前沿交叉学科学院,湖南 长沙 410073;2.西安工业大学 计算机科学与工程学院,陕西 西安 710021; 3.65052部队,吉林 白城 137100)
0 引 言
偏振光导航本质上是一种基于自然特征的新型天文导航方法,其通过对天空偏振模式的分析来实现航向获取。因此,相对于其他天文导航方式(如太阳敏感器、星敏感器等),偏振导航利用的是整个大视场天空作为观测对象,无需通视星体目标,因此具有更强的环境适应性和工作稳定性。为实现天空偏振光导航,需准确探测天空的偏振模式(即偏振度和偏振角)信息。因此天空偏振模式测量方法是偏振导航系统的核心技术。
随着图像传感器技术的进步,基于相机的天空大视场偏振探测方法[1~3]得到快速发展。在此类方法中,为了测量偏振模式需获得多幅不同偏振方向下的天空图像,这往往要通过“时分”测量[4]和“空分”测量两种途径来实现。“时分”测量主要包括旋转偏振片法[4]和液晶调制法[5],但牺牲了测量的实时性。“空分”测量方法只需一次拍摄就可以获得天空偏振模式的测量结果,其具有三种具体实施方式:多台相机同时观测[6],结构复杂且成本高;利用光场相机的分孔径结构[7~9],但鉴于光场相机本身的制作难度大,较难普及;在传感器表面安装类似彩色Bayer 滤镜的偏振滤镜[10],主要缺点在于偏振滤镜的加工和安装对准都非常困难(需要亚像素级的对准),以及由于成品率较低导致的设备成本昂贵。
本文利用IMX250-MZR微偏振阵列芯片,实现了60 FPS以上的实时天空偏振模式测量,并实验验证导航精度。
1 基于IMX250-MZR偏振芯片的天空偏振模式实时测量
日本Sony公司经过多年研发,于2017年成功实现了世界上第一款偏振成像芯片(IMX250-MZR)的稳定量产,该芯片的微观结构中每个像元表面覆盖有偏振膜,且相邻4个像元对应偏振膜的偏振方向均不相同,分别为0°,45°,90°和135°。这4个像元组成一个用于测量目标偏振信息的“宏像素”,通过其灰度值的联合计算可得到对应观测点的偏振度(degree of polarization,DOP)和偏振角(angle of polarization,AOP)信息
(1)
(2)
虽然该偏振芯片成像原理与文献[7~9]是相同的,Sony公司的主要贡献在于:IMX250-MZR芯片成功将微偏振阵列直接光刻在相机感光面上,而不像传统方法那样[10]光刻在一块平板玻璃上,省去了将微偏振阵列与相机感光面实现亚像素精度对准的工作,因此大幅降低了偏振相机的硬件成本。
2 利用天空偏振角分布图像获取航向角
偏振导航所选择的参考基准是天空偏振模式的对称轴方向,即太阳子午线方向。在给定时刻和经纬度的条件下太阳方位是确定的,这使得其可以作为一个绝对航向标准来使用。本文建立了2个坐标系:以相机自身建立的本体坐标系和以太阳子午线建立的参考坐标系。如图1 所示。相机本体坐标系以偏振相机的互补金属氧化物半导体(complementary metal-oxide-semiconductor,CMOS)靶面中心为原点,沿着靶面的水平和垂直方向分别为X轴和Y轴;参考坐标系中,以太阳子午线在水平面上的投影为S轴,与之垂直的方向为T轴。图中的黄色椭圆线简单给出了天空偏振化方向角分布的示意图,指示了其以太阳子午线为轴对称分布的特征。将两个坐标系的原点重合,可以看出,求得太阳子午线方向和X轴的夹角即为载体相对太阳的航向角(图中Ф所示)。可见获取航向角的前提就是提取偏振模式中偏振化方向角分布图像的对称轴。
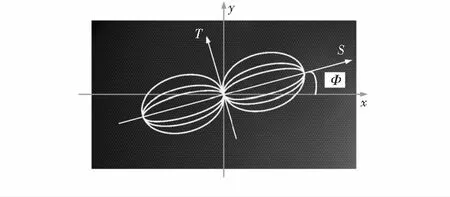
图1 本体坐标系和参考坐标系约定示意
图2为天球的三维空间坐标系在水平面的二维投影图,O为观测点。假设天空太阳高度角为0°,且太阳方位和水平坐标轴重合(图中S表示太阳所在位置),则水平坐标轴即为太阳子午线在水平面的投影。取关于太阳子午线对称的两点P和P′为被观测点,OM为随意选取的某一偏振方向0°起算方向,该方向在实际实验中根据偏振片的起振方向选定。根据瑞利散射模型,点P和P′处的天空偏振方向垂直于该点和太阳的连线,即NP⊥OS,NP′⊥OS。由几何关系可知,NP和OP,NP′和OP′之间的夹角关于太阳子午线对称,若以某一固定的方向OM方向为计算偏振角度的起始方向,显然一般∠MOP≠∠MOP′,计算出的偏振角分布图像难以体现出其对称性。
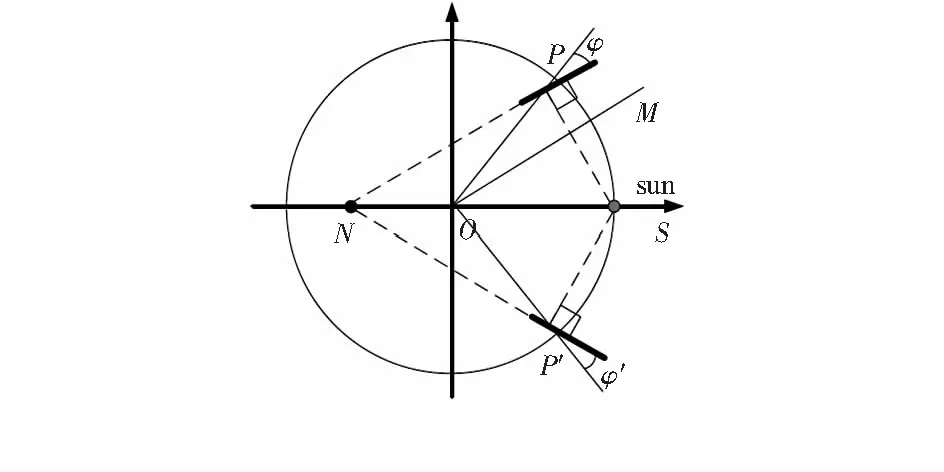
图2 天空偏振角分布的重绘模型示意
为此,将偏振相机所获取的AOP分布图像按照新的角度原则和参考系进行了计算:选择被观测点和中心点连线方向为0°起算方向。值得注意的是,这时的参考方向是随着观测点的不同而变化的,即每个被观测点的相对AOP等于该点散射光的偏振方向和该点与中心点连线之间所夹的锐角。
3 实验结果与讨论
为了验证IMX250-MZR芯片应用于天空偏振光导航中的性能,设计并实施了室外天空偏振模式测量实验,并验证了系统在静止状态下的航向角测量精度。实验选择了由长沙闪控信息科技有限公司(www.cycssk.com)提供的实时偏振相机样机,该样机基于Sony-IMX250-MZR偏振芯片开发,在全分辨率2 448 pixel×2 048 pixel条件下的实测最大帧频达到了60 FPS以上,完全能够满足大多数需要实时导航的应用需求。此外,为了获取尽可能高的天空偏振光导航精度,一般需要拍摄大面积的天空区域,为此使用了视场角达到180°的鱼眼镜头(品牌:Fujinon,型号:FE185C057HA-1,焦距:1.8 mm)。图3给出了实验系统拍摄的1帧天空图像以及图像局部放大结果,图中实验场景位于一栋高层建筑物的楼顶,镜头指向正上方的天空实施拍摄。从放大的图像来看,相邻像素的灰度值并不相同,这是由于天空光具有偏振特性,使得在不同偏振方向的像素下接收到的光强度不同所导致的。
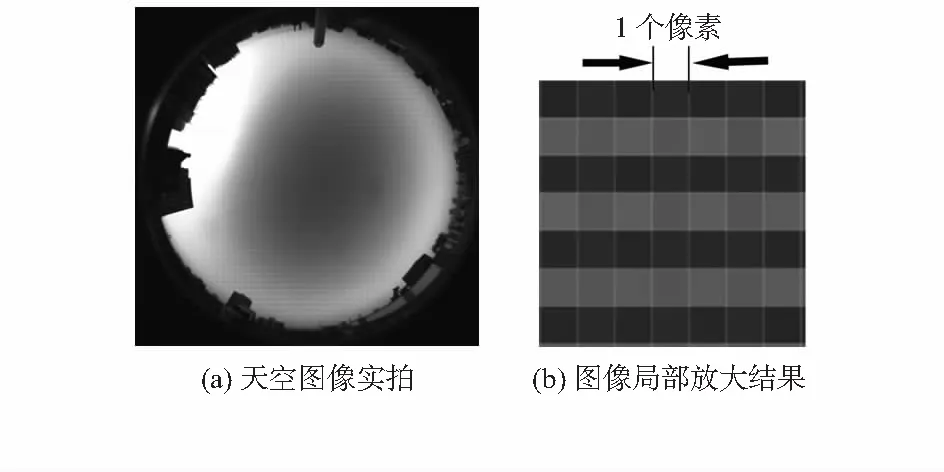
图3 天空图像及放大图
图4给出了图3中对应天空图像的偏振度DOP和偏振角AOP分布结果,该结果是由相机自带软件根据前文的DOP和AOP公式计算且直接输出的,输出帧频达到了60 FPS,完全满足实时性要求。由于太阳附近的天空光太强,导致图像过曝光,因此AOP和DOP结果在太阳附近出现信息丢失现象。在图4的DOP和AOP结果中,虚线箭头指示了天空子午线(即通过太阳与天顶点的连线)方向,可以发现:天空DOP和AOP分布均存在着明显的对称性,且对称轴均为太阳子午线,即符合天空偏振光导航的理论依据。由此可见,天空偏振光导航本质上是一种依赖太阳方位的天文导航方法,但其与传统的太阳敏感器相比更为稳健可靠(因为无需直视太阳)。另外,图4(b)中,箭头1和箭头2分别指示了天空的两个零偏振点,这是由天空大气层粒子散射所造成的特有现象。
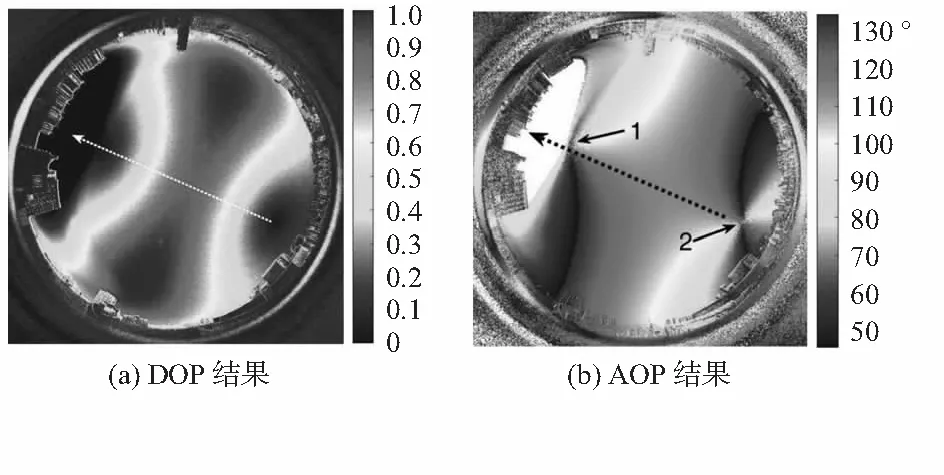
图4 实验中获得的DOP振度和AOP分布结果
根据前文所述的标准对图4(b)相机获得的天空AOP图像进行了重绘,结果如图5所示。可以看出,此时天空AOP关于太阳子午线对称分布的特性已经更为显著地体现出来,沿太阳子午线上的点其偏振化方向角的值为90 °左右,这意味着这些点上的偏振光的起振方向垂直于太阳子午线。该对称性符合基于瑞利散射模型的偏振化方向角的理论分布规律。
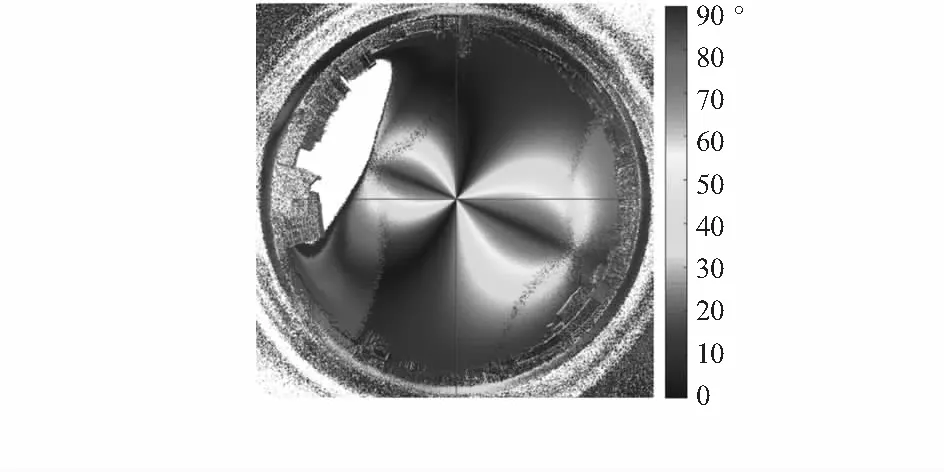
图5 天空AOP分布图依照新坐标系的重绘结果
在图5中,使用图像对称性提取算法[9],可以获取出太阳子午线的方向,进而得到太阳方位角。为了验证本系统的方位角获取精度,将相机安装在高精度角度旋转台上(品牌:日本Sigma Koki,型号:SGSP-120YAW,角度精度:0.02°),相机朝向正上方拍摄天空图像,角度台每旋转5°触发相机拍摄1帧图像,共计获得9帧图像(累计旋转角度40°)。由于相机帧频很高,在图像采集的整个过程中耗时很短,因此可以忽略这期间太阳的方位变化,将其作为恒定不变值来处理。为了尽可能降低太阳过曝光的影响,实验选择在傍晚太阳快要落下地平线时进行(2018年8月6日,18时38分)。图6给出了相机拍摄的1帧原始图像,以及对应的天空AOP分布结果(依照新坐标系进行了重绘处理)。
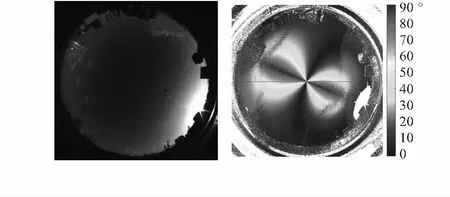
图6 相机拍摄的天空图像以及依照新坐标系的天空AOP分布重绘结果
对9帧图像进行对称轴提取[9],并进而计算出对称轴在图中的方向角,即得到太阳方位角。表1给出了太阳方位角真实值、计算值以及二者之间的误差量,从表中可见,本文方法得到的航向误差小于0.1°。其中,航向计算值以第一帧图像为航向的零点参考基准,计算值在小数点后第3位进行了舍入处理。

表1 太阳方位角真实值、计算值以及二者之间的误差量
受限于图像对称性算法相对较为耗时[9],只对第一帧图像实时全角度范围(0°~ 360°)的航向角搜索,从第二帧图像开始假设航向角是缓慢连续变化的,通过施加航向预测来缩小搜索范围。实验中算法在MATLAB环境下实现了大于20 Hz的航向计算频率(CPU:Intel i7 6820Q,内存:16 GB),低于相机自身60 Hz的帧频,下一步通过优化算法效率并改在C语言平台实现,相信可显著提升实时性能。
4 结 论
本文首次尝试将基于Sony偏振成像芯片的实时偏振相机应用于天空偏振光导航中,实验结果表明:系统的精度以及实时测量性能均能达到令人满意的效果。
猜你喜欢
空间电子技术(2020年5期)2020-03-11 09:12:16
电子制作(2019年12期)2019-07-16 08:45:20
测控技术(2018年6期)2018-11-25 09:50:24
现代职业教育·中职中专(2018年11期)2018-06-11 11:17:57
山西大同大学学报(自然科学版)(2016年2期)2016-12-12 03:19:15
中国机械工程(2015年13期)2015-12-16 12:25:40
橡胶工业(2015年10期)2015-08-01 09:06:00
橡胶工业(2015年6期)2015-07-29 09:20:36
橡胶工业(2015年1期)2015-07-29 08:33:52
中国中医药现代远程教育(2014年14期)2014-03-01 04:27:25
