冷却塔X支柱及环梁扣件式满堂支撑脚手架有限元分析
2019-01-15 05:15张鲁鹰刘昌斌许晓明尹骁
特种结构 2018年6期
张鲁鹰 刘昌斌 许晓明 尹骁
(山东电力工程咨询院有限公司 济南250013)
引言
脚手架体系是施工阶段中重要的临时支撑设施,在施工过程中由脚手架倒塌造成的工程事故屡见不鲜[1]。扣件式钢管脚手架体系是我国最常用的模板支撑体系,其中立杆顶部通过可调顶托传力的结构为支撑架,支撑架顶端立杆轴心受压,相同搭设情况下满堂支撑架的承载力比满堂脚手架高。
脚手架失稳与架体整体刚度、杆件截面、杆件纵横向间距、步距和剪刀撑布置等有关,其他条件一定下,通过合理设置竖向剪刀撑,可以提高脚手架的承载力,工程实践与理论研究表明,由于扣件连接具有半刚性,采用半刚性连接模型更符合脚手架结构[2]。袁雪霞等[3]采用不同扭转刚度的弹簧模拟扣件的半刚性连接,施加大小为竖向荷载1%的水平虚拟荷载模拟结构的初始缺陷,采用非线性屈曲计算法分析不同变量下支模架的稳定承载力,通过公式Pu=φ0Af、λ0=μ0h/i及《冷弯薄壁型钢结构技术规范》(GB 50018-2002)中φ值表推导形成了不同参数下计算长度系数表。James Reynolds和Zhang 等[4,5]利用对脚手架体系的实地调研与试验研究结论建立有限元模型,模型中充分考虑初始几何缺陷、荷载偏心、节点刚度等因素的影响,应用蒙特卡洛模拟法得到了体系抗力的统计参数。
某工程冷却塔X支柱及环梁为空间倾斜大体积现浇混凝土结构,施工中搭设的空间整体满堂支撑脚手架受力复杂。本文通过有限元软件SAP2000对两种方案进行对比分析,研究了两种方案在施工过程中的传力及内力分布、整体稳定性和架体变形的差异。综合上述研究在本文分析中,半刚性节点取扣件拧紧力矩40N·m时的转角刚度17.0kN·m/rad,初始缺陷采用水平虚拟荷载模拟,荷载值取竖向荷载的1%。
1 工程概况
某工程拟建设两台1000MW超超临界间接空冷发电机组,共包括两座冷却塔,每座冷却塔共有X支柱48对,X支柱断面尺寸1.2m×1.8m,X支柱向塔心方向倾斜,柱底±0.00m标高处中心半径为74.058m,柱顶33.125m标高处中心半径为65.055m,环梁底面宽1.95m,第一节筒壁环梁浇筑高度1.50m,为现浇混凝土结构,X支柱分四次浇筑成型,施工缝标高分别为+9.000m(施工段Ⅰ)、+18.022m(施工段Ⅱ)、+27.022m(施工段Ⅲ)、+33.125m(施工段Ⅳ),环梁浇筑为施工段Ⅴ,冷却塔X支柱及环梁空间结构见图1,工程所在地50年一遇基本风压为0.60kN/m2。
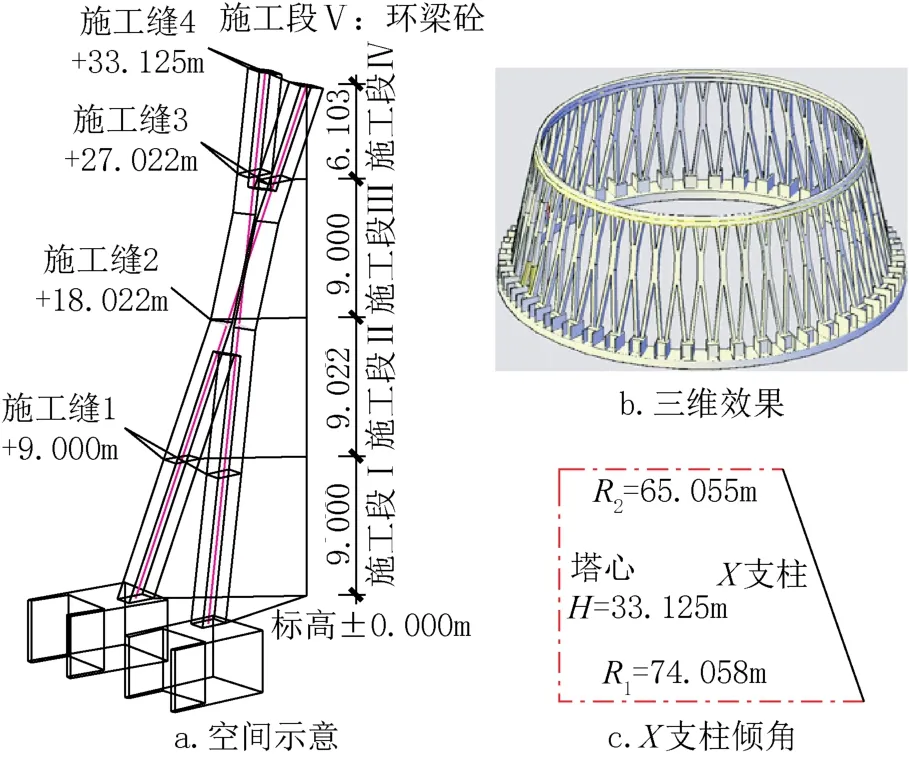
图1 X柱及环梁的示意Fig.1 Schematic diagram of the X-pillar and ring beam
2 架体设计方案
2.1 方案一
冷却塔X支柱及环梁扣件式满堂支撑脚手架搭设总高度36.2m,设计为环状封圈型脚手架,每对X支柱对应一个单元,共48个相同单元,每个单位圆心角7.5°,8跨9道均布立杆,立杆径向间距1.1m(环梁底为0.500m × 0.524 ~0.540m)、环向间距0.940m ~ 1.225m,步距为1.5m,每个主节点都设有纵横水平杆。径向剪刀撑在每个单元两侧各设两道,两单元共用中间一道。架体的结构和布置见图2。
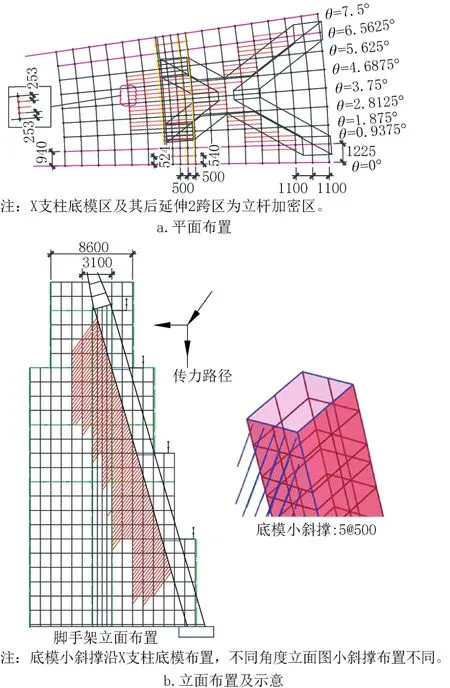
图2 方案一脚手架结构布置Fig.2 Structural layout for full scaffold in the first scheme
X支柱的空间倾斜力通过立杆和横杆传递,在初步手算中为了满足《建筑施工扣件式钢管脚手架安全技术规程》(JGJ 130-2011)[6]中表5.1.8受弯构件的容许挠度要求,在X支柱底面区域附加加密立杆及横杆,各环向主跨间设附加立杆三道(共5根),立杆位于跨度的四等分点上,用于支撑X支柱模板斜撑。X支柱模板下的小斜撑每排5根,各排间距为500mm,小斜撑向下延伸与三道立杆相连以保证荷载的传递,立杆与小斜撑的交点设置附加环向水平杆,用来传递水平荷载。
2.2 方案二
方案二与方案一的主架体结构基本相同,方案二的不同之处在于:(1)增加落地大斜撑:每个单元的中间四跨(五道立杆)向塔心方向延伸搭设15跨,内伸五道立杆的主节点上增加落地大斜撑,大斜撑从扫地杆斜向上延伸至模板小斜撑末端主节点上,视情况可直接支撑模板;(2)减少加密立杆:每跨内的附加三根加密立杆调整为仅保留中间一根加密立杆,加密区立杆间距为0.506m ~0.590m,加密立杆数量减少2/3;(3)增加传力八字撑:在小斜撑的末端节点处增设传力八字撑,八字撑与附近的主节点空间相连,减少水平杆的弯曲变形,使荷载尽可能传至主节点,并通过主节点上的落地大斜撑进行荷载的有效传递,如图3所示。
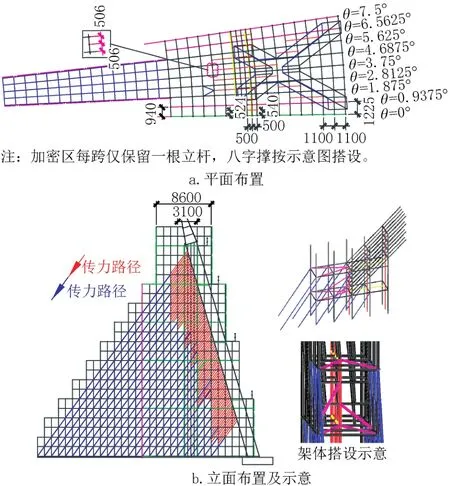
图3 方案二脚手架结构布置Fig.3 Structural layout for full scaffold in the second scheme
3 有限元分析对比
3.1 有限元模型
本文采用SAP2000有限元软件对冷却塔X支柱及环梁扣件式满堂支撑脚手架进行整体模拟分析,模型选取了1/48单元为研究对象,两侧采用对称边界条件,水平杆与立杆之间的节点为半刚性节点,取扣件拧紧力矩40N·m时的转角刚度为17.0kN·m/rad,立杆和斜撑的上、下端与模板和底座铰接,杆件与地面接触处采用100mm厚C15混凝土垫层以保证架体支座不变形,剪刀撑、斜撑与架体的连接为旋转扣件的铰接点,支撑架可调托撑螺杆的伸出长度为200mm。
方案中脚手管选用φ48×3.0mm(计算时取最不利壁厚为2.7mm),钢管材质为Q235,依据《钢结构设计标准》(GB 50017-2017)[7],钢材强度设计值f=215N/mm2,弹性模量E=2.06×105N/mm2,泊松比μ=0.3。X 支柱及环梁混凝土施工过程中模板、脚手架的荷载及荷载组合的计算依据《建筑施工模板安全技术规范》(JGJ 162-2008)[8]和《建筑施工扣件式钢管脚手架安全技术规程》(JGJ 130-2011)[6],混凝土分段施工过程中,仅考虑刚完成施工的一段新浇混凝土荷载,不考虑已完成施工的混凝土荷载。
3.2 有限元分析
利用SAP2000整体有限元模型对以上两种方案进行模拟分析,对比分析两种方案在五个施工段过程中不同受力情况下的内力分布、整体稳定性和变形情况。
1.内力对比
两种方案在设计时充分考虑了结构的安全性,方案设计较为保守,在有限元模拟分析中,不同施工段分析时两种方案的杆件内力都较小,应力比基本小于0.5,两种方案在施工过程中的强度都满足要求。两种方案设计的传力路径不同,脚手架的剪刀撑内力差距较大。
脚手架结构中剪刀撑构件属于构造设计,剪刀撑的设置可以提高脚手架的整体性和水平刚度,规范[7]给出了剪刀撑设置的构造要求,剪刀撑不属于主要受力构件不需要进行受力计算。在两种方案施工段Ⅲ时分析结果中提取边缘径向剪刀撑轴力如图4所示(恒载控制),方案一中指向X支柱方向的剪刀撑斜杆受压,内力较大,与X支柱近似平行的剪刀撑斜杆受拉,拉杆的内力小于压杆,方案一X支柱的空间倾斜力中水平分量通过横杆给出的旋转扣件承载力设计值,随着施工过程的进行,斜杆轴力超过8kN的占比越大,旋转扣件会产生滑移,剪刀撑失去作用,架体的多余约束和安全冗余度降低,方案一是不安全的,施工中可以采用双扣件抗滑移,但全部采用双和立杆的弯曲变形传递,架体在倾斜荷载作用下倾斜变形较大,导致边缘剪刀撑形变而承受较大的水平荷载,偏离了剪刀撑的设计原则;方案二中增加了落地大斜撑承担空间倾斜荷载,提高了架体中间跨的刚度,架体的倾斜变形很小,倾斜荷载基本不向架体两侧扩散,剪刀撑基本不承受内力,但由于架体在竖向荷载下的整体变形,剪刀撑斜杆都受压,其内力值远小于方案一。
两种方案θ=0.9375°径向剪刀撑在各施工段时轴力情况见表1,由表1可知,从施工段Ⅰ到施工段Ⅲ,随着X支柱混凝土浇筑高度的增加,空间倾斜力的影响范围增大,两方案剪刀撑的最大内力不断增加,且方案一的最大压力远大于方案二。方案一中剪刀撑最大轴力大于8kN,超过了规范[7]扣件大大增加了材料用量,部分采用双扣件又明显增加了施工管理难度。施工段Ⅴ为环梁混凝土施工,其竖向荷载通过环梁下的加密立杆承受,无水平推力,故两种方案中剪刀撑的内力都较小。
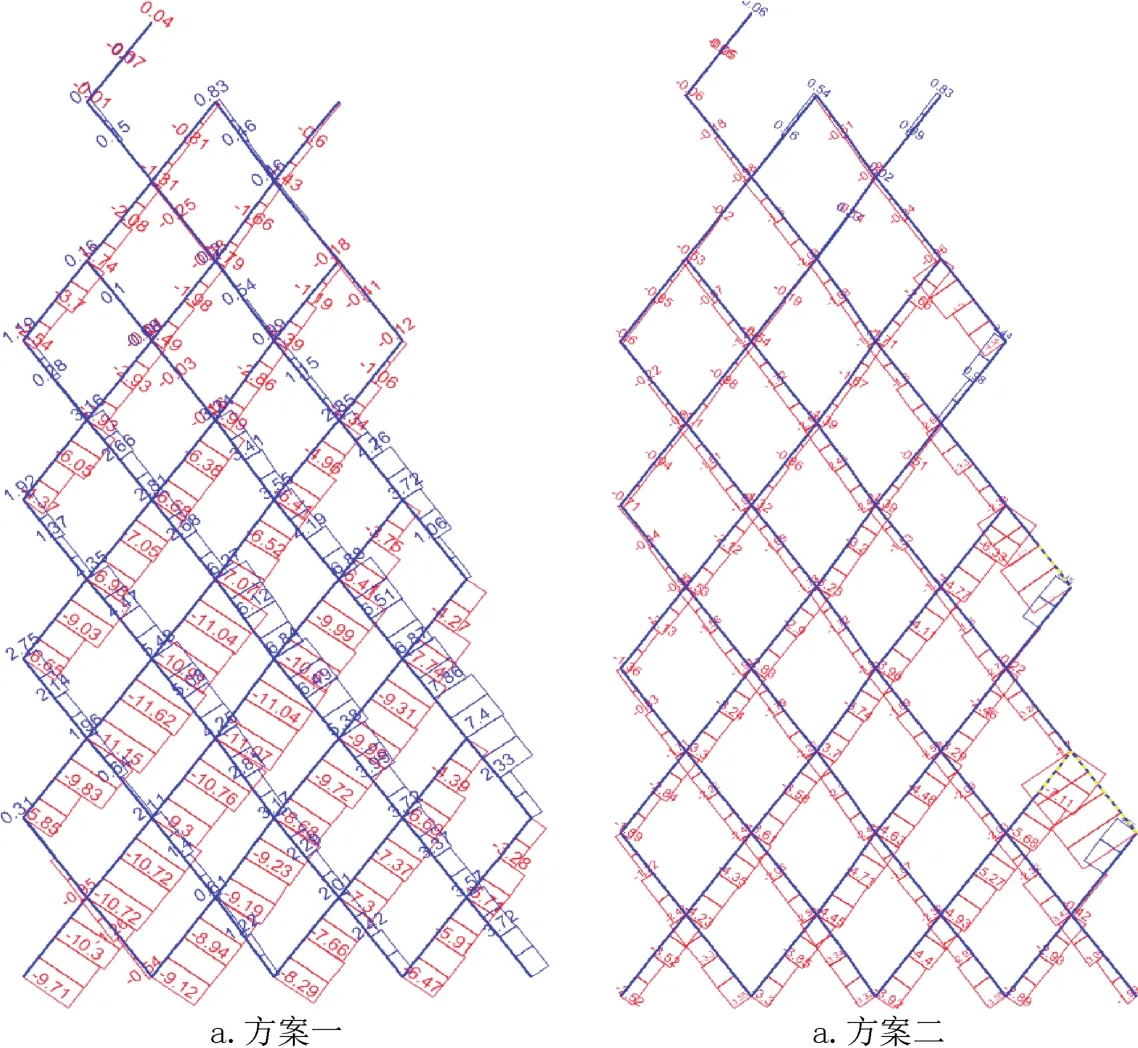
图4 两种方案施工段Ⅲ时θ=0.9375°径向剪刀撑轴力图Fig.4 Axial force of vertical bridging with θ=0.9375°for two design schemes in the third stage

表1 两种方案θ=0.9375°径向剪刀撑在各施工段的轴力Tab.1 Axial force of vertical bridging with θ=0.9375°for two design schemes
2.整体稳定性对比
两种方案在施工段Ⅲ时整体一阶失稳模态如图5所示,方案一在施工段Ⅲ时架体小斜撑末端的加密立杆受压最大,且高度越低压力越大,故在如图5a位置处发生大波鼓曲失稳破坏;方案二中施工段Ⅲ的倾斜荷载通过落地大斜撑承担,大斜撑受压较大,在架体的内伸15跨里,内伸脚手架横向仅四跨,大斜撑的面外刚度较低,架体一阶屈曲发生在内伸部位面外刚度突变处,如图5b所示。两种方案在双向失稳的共同作用下会发生大波鼓曲整体失稳破坏,说明本文所建模型合理,计算方法科学。在最不利施工段Ⅲ时,方案二的一阶特征值明显大于方案一,两种方案一阶特征值都大于1,两种方案都是稳定安全的。
两种方案在各施工段时的一阶特征值见表2,由表2可知,从施工段Ⅰ到施工段Ⅲ,空间倾斜力的作用位置升高,架体整体失稳时一阶特征值不断减小,尤其是方案一,施工段Ⅱ、Ⅲ、Ⅳ时方案二的特征值远大于方案一。不同施工段时方案一的传力路径差距大,架体的整体稳定离散性大,方案二中荷载通过均匀布置的落地大斜撑传递,架体的整体稳定较均匀。施工段Ⅴ为环梁混凝土施工,两架体的整体稳定基本相同。
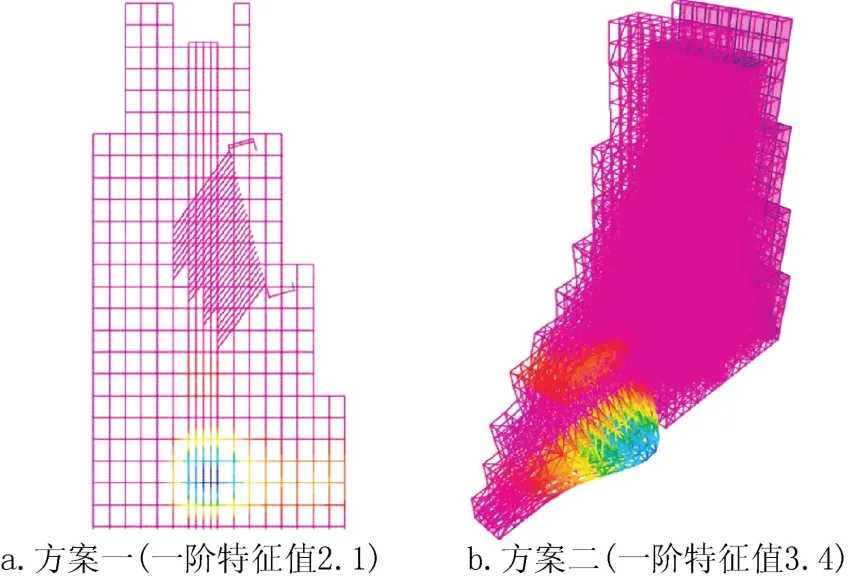
图5 两种方案在施工段Ⅲ时架体一阶失稳模态Fig.5 Buckling mode of full scaffold for two design schemes in the third stage
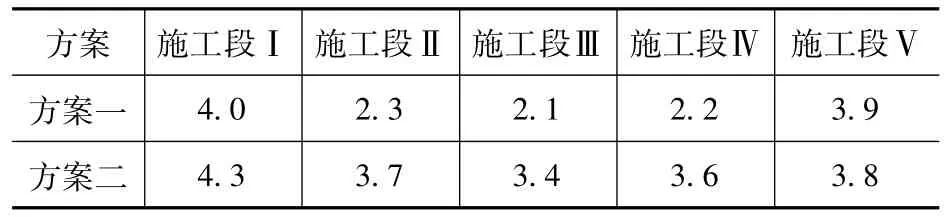
表2 两种方案在各施工段时的一阶特征值Tab.2 Eigenvalues of full scaffold for two design schemes
3.变形对比
两种方案在施工段Ⅲ时整体位移如图6所示,两种方案主要的荷载是X支柱及环梁新浇混凝土自重,架体位移变形主要发生在底模处,底模通过小斜撑与加密立杆或落地大斜撑相连,不必验算脚手架纵向、横向水平杆挠度。方案一中倾斜荷载的水平分量通过钢管的弯曲变形承担,钢管的抗弯刚度远小于轴向刚度,架体受力变形较大,不利于模板变形控制;方案二中倾斜荷载通过落地大斜撑的轴向变形承担,架体的整体变形较小。施工段Ⅲ时,方案一架体最大位移是方案二最大位移的两倍,方案二架体的整体刚度更大。
两种方案在各施工段时的最大位移见表3,由表3可知,从施工段Ⅰ到施工段Ⅲ,随着混凝土浇筑高度的增加,架体最大位移不断增大,尤其是方案一,施工段Ⅱ、Ⅲ、Ⅳ时方案一架体的位移远大于方案二。方案二中均匀设置的落地大斜撑刚度均匀,架体在不同施工段时的位移值变化较小。施工段Ⅰ时混凝土的浇筑高度较低,底模小斜撑离地高度很低,两种方案的最大位移差距较小。
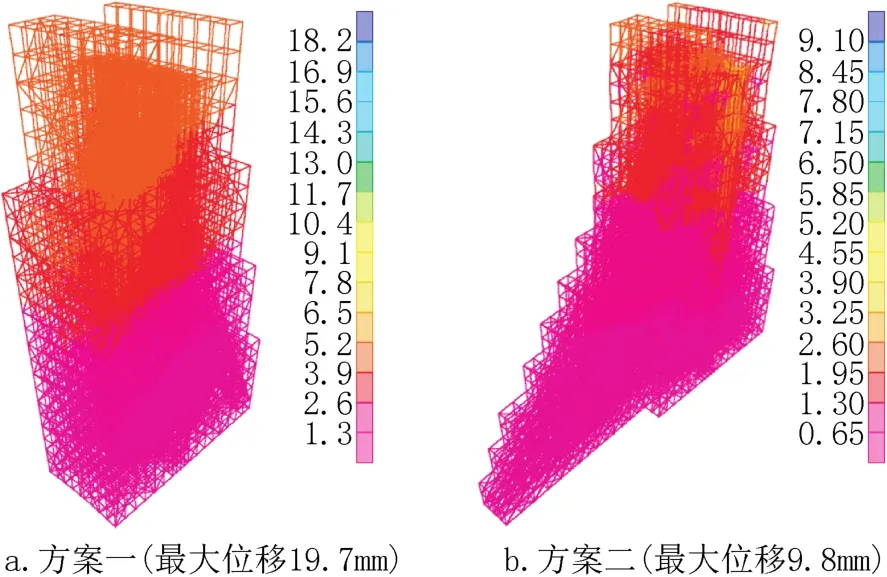
图6 两种方案在施工段Ⅲ时整体位移(单位:mm)Fig.6 Deformation of full scaffold for two design schemes in the third stage(unit:mm)
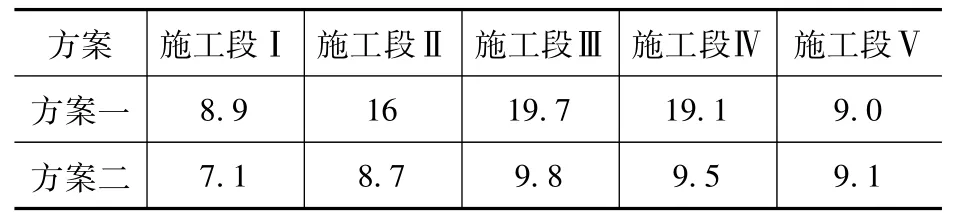
表3 两种方案在各施工段时的最大位移(单位:mm)Tab.3 Maximum deformation of full scaffold for two design schemes(unit:mm)
通过以上的对比分析,方案二内力分布均匀,传力路径良好,剪刀撑内力显著降低,结构的整体稳定性高,架体变形较小。方案一中加密立杆间距为0.253m~0.295m,间距过小工人无法穿行,施工不便;方案二中传力路径的变化可减少加密立杆,立杆间距可达0.506m,可以使用电动扳手,大大提高了施工效率。故该工程实际施工中采用方案二。
4 现场施工控制
在该工程冷却塔X支柱及环梁施工过程中采用方案二中脚手架结构,如图7所示。表4中架体在各个施工段中的位移值较小,但是结构在施工段ⅠⅡⅢⅣ累计位移值较大,施工过程中根据有限元分析结果结合现场的施工组织设计,对X支柱进行整体起拱,X支柱柱顶处背离塔心方向偏移35mm进行整体起拱;最后在环梁混凝土浇筑时,已浇筑的混凝土X支柱可作为新浇环梁的支座,在环梁跨中处预起拱9mm。

图7 现场施工及脚手架搭设Fig.7 Full Scaffold in the construction site
施工过程中对混凝土浇筑前、中、后模板的位移情况进行测量监控并记录,从现场施工过程中测量记录的48对X支柱及环梁的位移结果中选取6组数据见表4,在X支柱的四段施工过程中,施工段Ⅰ时架体的位移值比有限元结果稍低,随着施工高度的增加,架体在施工段ⅡⅢⅣ时位移值比有限元结果略高,架体在施工过程中实测位移值与有限元结果基本吻合,充分证明了有限元模型的准确性及方案二脚手架结构的可行性;通过对X支柱进行整体预起拱35mm,施工完成后模板的累计位移值平均值为37.3mm,冷却塔X支柱变形控制良好,架体整体模型的有限元分析可以很好地指导现场施工管理。
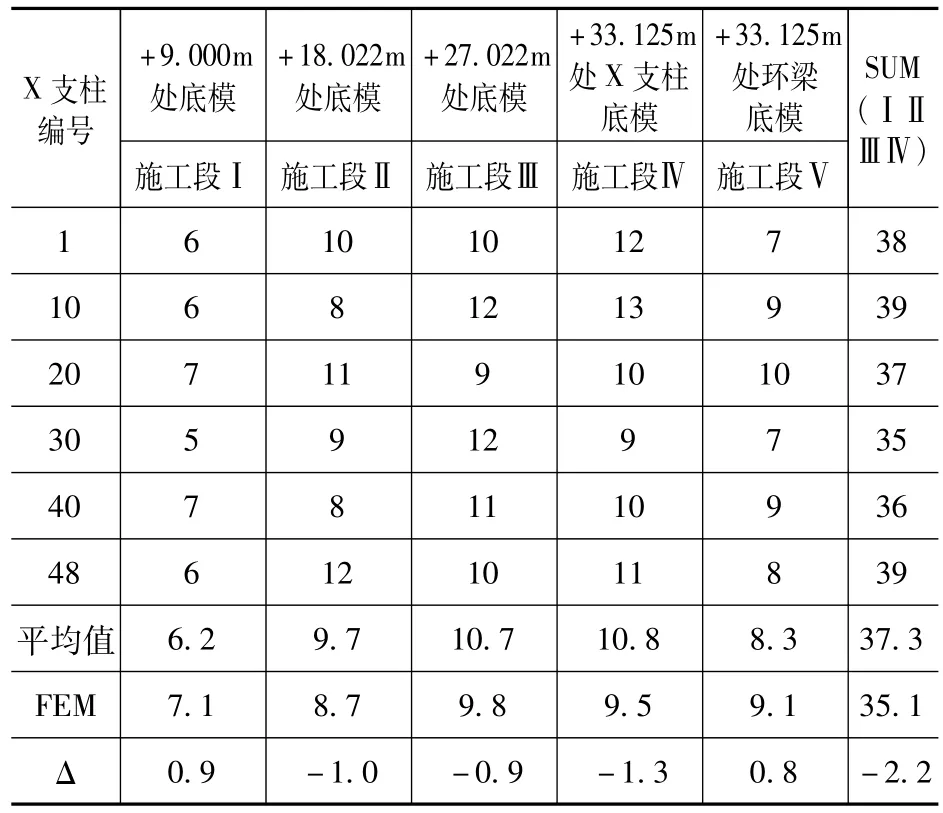
表4 X支柱及环梁施工过程中的位移结果(单位:mm)Tab.4 Measurement result of X-pillar and ring beam during construction(unit:mm)
5 结论
某工程冷却塔X支柱及环梁为空间倾斜大体积现浇混凝土结构,施工中搭设的空间整体满堂支撑脚手架受力复杂。本文通过有限元软件SAP2000对两种方案进行对比分析,结论如下:
1.方案二中空间倾斜荷载通过增加的通长落地大斜杆直接传递到地面,传力路径合理,架体刚度均匀,结构的整体稳定性高,架体整体变形较小。
2.方案一中径向剪刀撑受力较大,部分扣件滑移失效;方案二中剪刀撑内力显著降低,架体的约束冗余度高,结构更安全。
3.方案二中架体加密区的立杆大大减少,立杆间距较大,施工方便快捷。
4.利用有限元变形结果指导现场施工,脚手架的预起拱使模板的变形得到了有效控制。
猜你喜欢
四川建材(2022年8期)2022-08-30
设备管理与维修(2022年6期)2022-04-22
工业建筑(2022年1期)2022-04-21
计算机仿真(2021年9期)2021-11-17
山西建筑(2021年21期)2021-10-26
施工技术(中英文)(2021年16期)2021-10-22
安徽建筑(2020年7期)2020-08-05
中华建设(2019年5期)2019-07-05
魅力中国(2017年41期)2017-11-04
烟台果树(2015年3期)2015-12-10