基于改进人工势能的无人机编队与避障
2019-01-14 03:38:52阳周明冯运铎于亚龙
火力与指挥控制 2018年12期
刘 艳,阳周明,冯运铎,于亚龙,宋 淼
(1.北方自动控制技术研究所,太原 030006;2.北京理工大学,北京 100081;3.北京军事代表局,北京 100166)
0 引言
无人机在现代战争中具有很多优势,其主要作战特点为隐蔽性好、生命力强、造价低廉、不惧伤亡、起降简单、操作灵活、可实施有效的侦察情报支援、可执行不同的电子战任务、可担负各种空中作战任务、出众的协同能力等[1-2]。尽管无人机技术已经相对成熟,但有时单架无人机的性能无法满足任务需求,例如执行侦察任务时由于传感器限制,单架无人机可侦察范围有限,无法有效覆盖侦察区域。且一旦无人机出现故障,便意味着任务失败。针对这种情况,根据自然界常见的生物群体现象,例如候鸟迁徙过程中的队形保持、鱼群在抵御天敌时的协同防御等,提出多架无人机协同编队飞行的解决方案[3]。
无人机常见的编队队形有楔形队、梯队、横队、纵队和V形等,可以实现协同侦察、防御和进攻等复杂任务。合理有效的队形设计可以有效增加无人机气动效率和结构强度,减少飞行阻力,节省燃油,延长无人机编队飞行距离,增加编队灵活性,这大大提高其安全性与任务完成率。2011年,英国机械工程师协会的报告指出V字队形最高可节省12%的燃料[4]。
当前无人机的编队方法主要有长机-僚机法、行为法、虚拟结构法和人工势能法等[5-7]。长机-僚机法只需给定领航者的轨迹即可,简化了系统的控制,但是一旦领航者失效编队队形也会失效;行为法不能定义明确的整体系统行为,也无法保证队形的稳定;虚拟结构法虽然存在队形反馈具有较高的编队精度,但是以虚拟结构为队形的运动行为限制了其应用;人工势能法对通信和计算能力的要求较低,具有较好的局部处理能力和较强的实时性,但是由于势能只是距离的函数,易于形成栅格状结构而不易于形成特定的队形。
将长机-僚机法和人工势能法相结合,可以简化系统并在局部信息交互的情况下实现V字型的编队。Yasuhiro Kuriki等[8]在一致性算法和领航者编队结构基础上增加了每个智能体的人工势能,解决了编队形成过程中的碰撞问题。AnhDucDang[9]以领航者为中心构建V字型虚拟结构并利用人工势能使无人机到达指定位置,并通过增加额外的回环力使无人机摆脱障碍物局部最优的情况,以及此种情况下领导者的更换问题。但是其避障算法只是针对单架无人机而不是整个编队面对障碍物时的整体行为。
1 基本问题描述
用无向图G(v,ε)来表示无人机之间的通信拓扑关系,其中节点集合v={1,2,…,n}表示n架无人机,边的集合ε⊆{(i,j):i,j∈v,i≠j}表示无人机之间的通信拓扑结构。由于无人机的感知范围有限,通常无人机只能感知到以自身为中心一定半径以内的其他无人机的状态,且由于无人机之间的通信是双向通信,所以图G是无向的。
记无人机i的邻域为Ni,表示无人机i可以感知到的其他无人机的集合,由于在无人机i感知范围内的无人机同样也是运动的,可能会运动到感知范围之外,所以系统具有切换拓扑结构,且无人机i的邻域可以表示为:

为简化无人机运动模型,不考虑无人机垂直方向上的运动和气动性能、飞行状态等因素,只考虑横侧向运动,将无人机简化为二维平面上的质点,pi,vi,ui∈Rm(e.g.,m=2,3)分别表示无人机 i的位置、速度和输入。同理将目标也简化为质点,pt,vt∈Rm分别表示目标的位置和速度。po∈Rm,po分别表示障碍物的位置和半径,即将障碍物简化为以po为圆心半径为ro的圆。综上可知为无人机运动模型为:

2 算法分析
2.1 传统人工势能
Khatib[10-11]在1986年首次提出人工势场方法以解决机器人和障碍物之间的碰撞问题,假设机器人和障碍物之间具有虚拟的斥力,当机器人靠近障碍物时斥力会逐渐增大将机器人推开。O-fati-saber[12-13]在多智能体系统中结合人工势能和一致性理论,实现了多智能体蜂拥控制,使多智能体在满足聚合、避碰和速度匹配原则的情况下形成栅格状的结构,并以相同速度运动。
如下页图1所示假设无人机的通信半径为r,防止碰撞的安全距离为ra,无人机之间的期望距离为 rc,且满足 ra<rc<ra。θ为期望的 V字型编队夹角,在无人机保持相同的速度时,其大小等于领导者对无人机的视线角的2倍。即将编队的约束具体为距离和视线角约束,θ=2 χ。

图1 编队示意图
现在假设无人机i和j之间具有虚拟力fij,其中a,b,c,h 为辅助参数,且满足 0<a<b 和以保证当无人机i和j的距离等于期望的距离时虚拟力和势能都为零,nij为无人机i指向无人机j的单位向量。对虚拟力积分可以得到无人机之间的势能函数:

其中

图2、图3为虚拟力和势能示意图,在dij=rc时无人机i和j之间的势能和虚拟力皆为零,即Vij=0,。且当dij<rc时,无人机之间具有排斥力且随距离的减小而逐渐增大,当dij>rc时,无人机之间的吸引力随距离的增大而逐渐增大,但是当dij>r时由于两者已不在彼此的感应范围之内,所以此时虚拟力为零,势能保持不变。
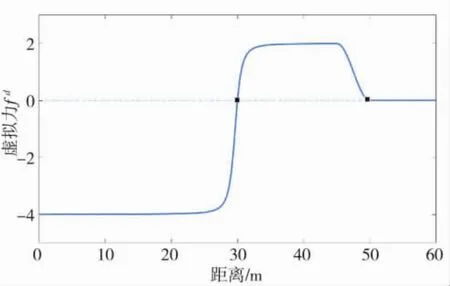
图2 无人机间虚拟力
虽然人工势能法具有实时快速控制的优点,但是传统的人工势能函数只是距离的函数,所以只能控制无人机之间或无人机和障碍物之间的距离,而当多架无人机需要组成编队时,对于所有无人机之间的距离相同的情况下只能形成栅格状的队形,如要形成其他的队形则需要计算每个无人机之间的距离或者构建更多的虚拟领航者。除此之外,人工势能法的最大缺点是会陷入局部最优情况,一旦无人机陷入势能的局部最小点便无法形成期望的编队,且无人机的数量越多就越容易产生这种情况。
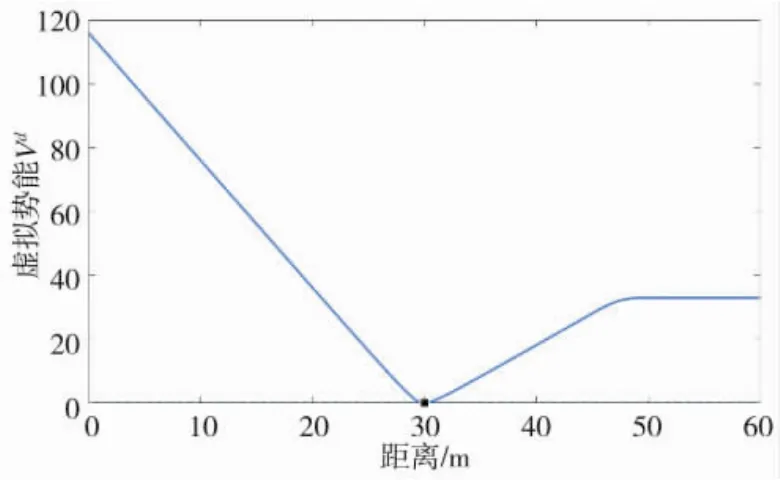
图3 无人机间虚拟势能
不同于栅格结构仅仅对无人机之间的距离有约束,V字型编队需要无人机之间保持相对的角度,所以将人工势能法和领航法相结合,在多架无人机中选择一架为领导者,其他无人机为跟随者。跟随者在自身和领航者的人工势能下形成V字型的编队,且在这一过程中避免彼此之间的碰撞。如图1所示,定义跟随者和领导者之间的夹角αi,在跟随者和领导者速度相同的情况下,其本质上是领导者相对于跟随者的实际视线角和期望视线角之差,即α=χ-χc,且由领导者的速度 vl、位置 pl和跟随者的位置pi计算可得,其中L(θ)为旋转矩阵:
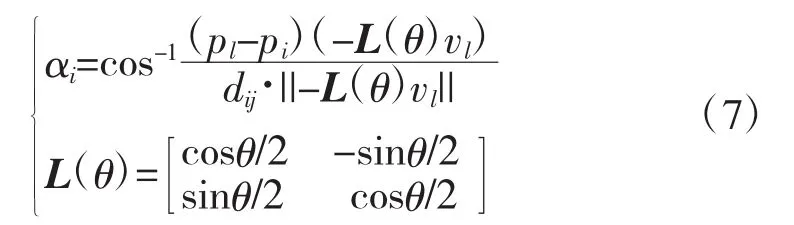
假设无人机周围除了其他无人机由距离产生的势场Vd之外,还具有领导者产生的势场Vl,其产生的虚拟力为fl,其中dil,nil分别为无人机i和领导者的距离以及无人机i指向领导者的单位向量:
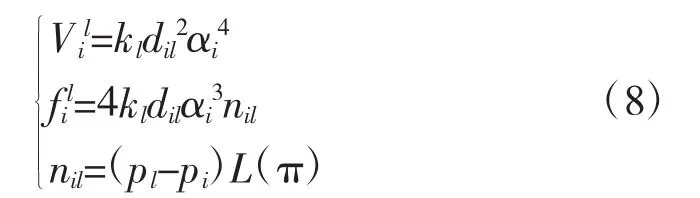

图4 领导者周围虚拟势场
2.2 编队算法
无人机形成V字型编队需要满足以下两点:无人机之间的位置具有一定偏差;无人机保持相同的速度。前一节中介绍的人工势能使无人机之间的位置满足第一个条件。假设目标具有和无人机相同的简化运动模型,在此基础上结合上一节的人工势能函数,得出无人机的输入为:


编队势能项为上一节所述的两种虚拟力的加权总和,起到控制无人机相对位置的作用,唯有无人机之间保持相同距离且形成V字型编队时整体势能为零,此时。

编队队形的保持需要以无人机速度相同为前提,而在简化模型中可以将速度和输入看作为一阶积分系统。且在无人机之间的通信拓扑图具有有向生成树的情况下,采用一阶一致性的控制算法,如式x所示,可以使所有无人机的速度趋于一致,其大小为所有无人机初始速度的平均值[14]。但是领导者反馈项将领导者的速度和输入反馈给追随者,使跟随者的速度收敛至和领导者相同的速度,同时可以随领导者作机动的运动。

领导者的输入和跟随者本质上相同,但因为领导者只需跟踪目标,所以输入只和目标状态有关,其中 dt、rt、vt、ut分别为领导者和目标之间的距离、领导者追踪距离、目标速度和目标加速度。

2.3 编队避障算法
无人机的避障问题指无人机对外界环境中的障碍物的躲避。避障算法对于无人机缩短任务执行时间,提高任务成功率有着重要的意义。人工势能法是无人机常用的避障算法,通过在障碍物周围建立排斥的虚拟力场使无人机能够远离障碍物。针对势能函数的局部最优问题,在障碍物周围额外增加虚拟的回环力,使其能够摆脱局部最小值。

图5 编队避障示意图
如图5所示假设障碍物为以(xo,yo)为圆心,半径为Ro的圆,其可探测距离为ro,则障碍物对无人机i产生的势能为Vo,障碍物对无人机产生的排斥力为fo,其中no,do分别为无人机指向障碍物的单位向量和距离。

假设障碍物数量为m,则无人机i的避障项为所有障碍物产生虚拟的总和:

虽然人工势能可以解决单架无人机避障问题,但是对于无人机编队来说,障碍物的出现会使无人机周围的虚拟势场更加复杂,这意味着无人机更有可能陷入局部最优的情况而破坏编队队形。为了避免这种情况,将障碍物的位置信息反馈给编队控制器,即根据周围障碍物产生的势能大小调节V字型编队的夹角,使编队整体有能力自适应的躲避障碍物。

由上式可知,当周围障碍物逐渐增多,或者越靠近障碍物时,障碍物产生的势能越大,则编队的夹角越小,队形越趋于狭长,更加有利于编队通过障碍物。则综上可得,对于V字型编队中的跟随者,避障算法如式(17)所示,其中编队夹角由式(16)可得:

3 仿真结果
假设无人机的数量n=3,其中无人机1为领导者,2和3为跟随者,其初始位置分别为(100 m,75 m)、(20m,10m)、(-40m,30m)。初始速度分别为(10m/s,8 m/s)、(-20 m/s,12 m/s)、(-18 m/s,-17 m/s)。目标的初始位置和速度分别为(500 m,400 m)和(30 m/s,0),其输入在 t≤50 s时为(0.5cos(0.1t)m/s2),在t>50 s时为(0,0)。障碍物的数量 m=3,其位置分别为(500 m,400 m)、(650 m,800 m)、(1 200 m,700 m),半径分别为150 m、150 m和220 m。其他的参数如表1所示。
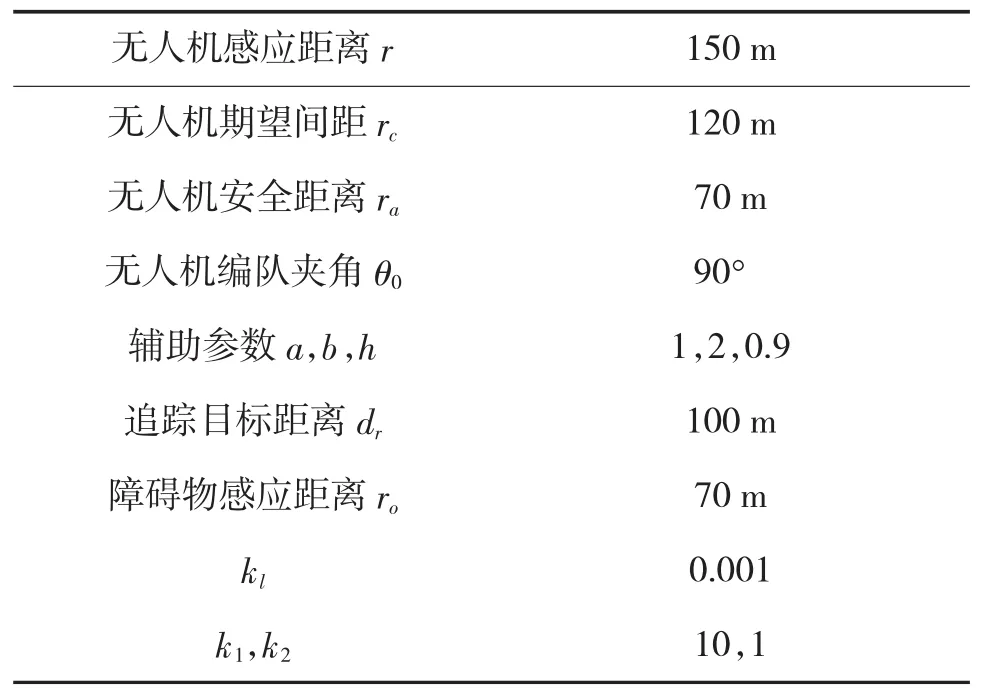
表1 仿真参数
在上述的初始条件和参数设置下采用控制算法如式(13)和式(17),可得仿真结果如图6所示,3架无人机从初始位置出发,在t=10 s时已经形成V字型编队,在t=13.5 s和t=20 s时由于遇到障碍物,编队队形进行改变,编队夹角变小以适应狭小地形。且整个编队在领导者带领下以一定的距离跟踪目标并随着目标运动。在t=60 s时3架无人机以夹角90°的V字形编队追踪目标,且领导者和目标之间的距离为100 m。

图6 仿真示意图
如图7、图8所示分别为无人机之间的速度变化和距离变化。如图7所示可以看出在t=10 s和t=27 s处无人机的速度已经逐渐收敛,但是由于障碍物和作为领导者的无人机1的速度变化等原因,速度没有继续收敛至一致,而是在t=55 s之后在速度一致项的作用下逐渐趋于56 m/s。如图8所示在t=10 s之后无人机1和无人机2、3之间的距离已经收敛至期望值120 m,随后在遇到障碍物时有小幅的波动,在此之后便一直稳定在期望值。由于障碍物导致的队形变化使无人机2和3之间的距离在t=10 s和t=30 s之间变化剧烈,但除此之外始终维持在固定值169 m。而作为领导者的无人机1和目标之间的距离在t=30 s之后逐渐收敛至100 m。

图7 无人机之间速度变化

图8 无人机之间距离变化
而无人机期望的角度约束变化由图9所示,在t=10 s时无人机2和3的α角已经渐渐趋于一致,但是由于队形需要改变以躲避障碍物,所以在10 s<t<40 s时无人机的期望约束角α不断变化。最终在t=40 s之后约束角都趋于期望值,但由于角度约束产生的虚拟力和无人机之间的距离有关,所以当无人机之间的距离逐渐减小时,虚拟力大小也会越来越小,造成角度变化会越来越慢,所以当t=100 s时还是有0.3°的误差。但是如果时间足够长,误差会逐渐减小至0。

图9 无人机的α角
4 结论
无人机编队在未来的军事领域将受到广泛的应用,本文针对无人机编队协同追踪目标和避障问题,结合领航法和人工势能法,在简化无人机模型基础上,以领航者为中心建立了V字型编队的人工势场,以目标为中心的引力场和以障碍物为中心的斥力场,同时将障碍物的信息反馈给队形控制器,使编队队形根据周围的环境自适应地改变,使编队整体更有效地躲避障碍物。仿真结果表明,基于改进人工势能的编队方法能够对无人机进行有效的控制,形成V字型编队,在躲避障碍的同时以一定距离追踪目标。但是在直角坐标系的表示方法下势能函数中具有反三角函数的存在,提高了算法的复杂性,在下一步的研究中,将重点研究极坐标系下的人工势能法,以实现更简单的算法。
猜你喜欢
中学生数理化·中考版(2024年2期)2024-05-23 10:11:40
科学导报·学术(2020年26期)2020-10-21 11:18:54
作文大王·低年级(2019年6期)2019-08-01 01:44:02
中国广播(2017年9期)2017-09-30 21:05:19
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”
当代贵州(2017年24期)2017-06-15 17:47:35
诗潮(2017年5期)2017-06-01 11:29:51
新疆农垦科技(2016年2期)2016-08-21 13:50:22
新疆农垦科技(2016年2期)2016-08-21 13:50:18
西北工业大学学报(2015年1期)2016-01-19 03:29:50
中国机械工程(2015年13期)2015-12-16 12:25:40