踝关节康复装置的设计与分析*
2019-01-10 08:59:50王中长
机械制造 2018年12期
□ 王中长
滨州学院 机电工程学院 山东滨州 256603
1 研究背景
踝关节是人体既灵活又稳定的负重关节,属于屈戍关节,由胫骨远端、距骨、腓骨远端及周围韧带组成。日常生活中的行走、跳跃活动,主要依靠踝关节的跖屈、背屈运动完成。在踝关节正常的屈伸运动中,常伴有内翻与外翻两个动作。当踝关节不能主动运动时,会造成患者运动困难,从而导致患者长期卧床、全身截瘫,甚至会引起其它严重的并发症。如果能有一款康复装置帮助踝关节在被动情况下跖屈40~50°、背屈20~30°、内翻 35~40°、外翻 15°,并能根据患者的个体情况设置不同的运动角度与时间,进行连续往返式运动,这对踝关节不能或较难进行主动活动的病人而言具有现实意义,并能防止踝关节僵硬、下肢肌肉萎缩[1]。可见,开展踝关节康复装置的研究具有重要意义。
2 装置机械结构
2.1 机械结构功能
踝关节康复装置的机械结构需要实现以下功能:①永磁直流电机高转速与康复装置低速运行间的大传动比转换;② 人体脚踝的跖屈、背屈运动,以及内、外翻运动,并且两个自由度的运动相互独立、互不产生干涉;③患者在坐、卧姿势下均可进行持续被动康复训练。
为了便于移动和放置,康复装置的体积不能太大,按照600 mm×500 mm×200 mm的尺寸设计康复装置整体结构[2]。
2.2 驱动电机和减速器
踝关节康复装置的动力源应尽可能满足运行平稳、机械特性硬、控制简单、环保的要求,而且其输出扭矩测量系统的成本要低。另外,动力源和扭矩测量系统的体积和质量不能太大,以满足康复装置体积小、携带安置方便的特点。综合考虑成本、体积和控制方法等因素,决定采用永磁式有刷直流电机作为踝关节康复装置的驱动电机[3]。
行星齿轮减速器与其它传动装置相比,具有体积小、质量轻、结构紧凑、传动比稳定、工作可靠、承载能力高、传动效率高等突出优点,并且价格较低,使用寿命长,可以与直流电机装配在一起,组成直流减速电机。另外,即使在没有输入信号的情况下,也能保证减速器输出轴的静止状态,实现康复装置达到预设角度值时停滞一定时间的功能要求。
2.3 跖屈、背屈和内外翻运动机构
如果采用一个驱动电机,通过机械传动装置可以实现跖屈、背屈,以及内、外翻运动,但是无法做到两者的相互独立、互不干涉,即当设定一个自由度的摆动角度和转动速度时,另外一个自由度的摆动角度和转动速度也随之确定。因此,采用两个驱动电机,通过各自的传动装置实现踝关节康复装置两个自由度的独立运动[4]。对两个运动进行布局时发现,实现某一自由度的直流电机、机械传动装置和执行部件等整套装置,必须安装在另一自由度的执行部件上。考虑到人体足部跖屈、背屈运动的负载力矩比内、外翻运动大,将跖屈、背屈运动的驱动电机和传动装置固定在康复装置支座上,将内、外翻运动的整套装置安装在跖屈、背屈运动的执行部件上,实现跖屈、背屈,以及内、外翻运动的合理叠加[6]。康复装置整体结构如图1所示。
第一直流减速电机通过固定板安装在支座上,其输出轴通过联轴器与第一旋转轴相连,将电机的旋转运动传递给脚踏板,带动脚踏板来回摆动,实现康复装置的跖屈、背屈运动。第二直流减速电机通过L板安装在底部固定板上,用第二轴承座将脚踏板安装在底部固定板的另一侧,由第一齿轮和第二齿轮啮合实现第二直流减速电机到脚踏板的运动传递,使内、外翻运动合理地叠加在跖屈、背屈运动的执行部件上。此时,两个自由度满足了相互独立、互不干涉的要求。由于内外翻运动的整体旋转角度小于60°,为了便于尺寸布局合理,结构紧凑,将第二齿轮做成扇型结构,缩短脚踏板到底部固定板的距离,提高运动的稳定性,压缩脚踏板侧板方向的体积,使康复装置更美观、合理。为了使患者在坐、卧姿势下均可使用康复装置进行持续被动运动,将支撑腿做成伸缩结构,即通过调节支撑腿上螺母的位置,改变支撑腿的总长度,使小腿托处于不同的倾斜角度,从而满足患者需求。
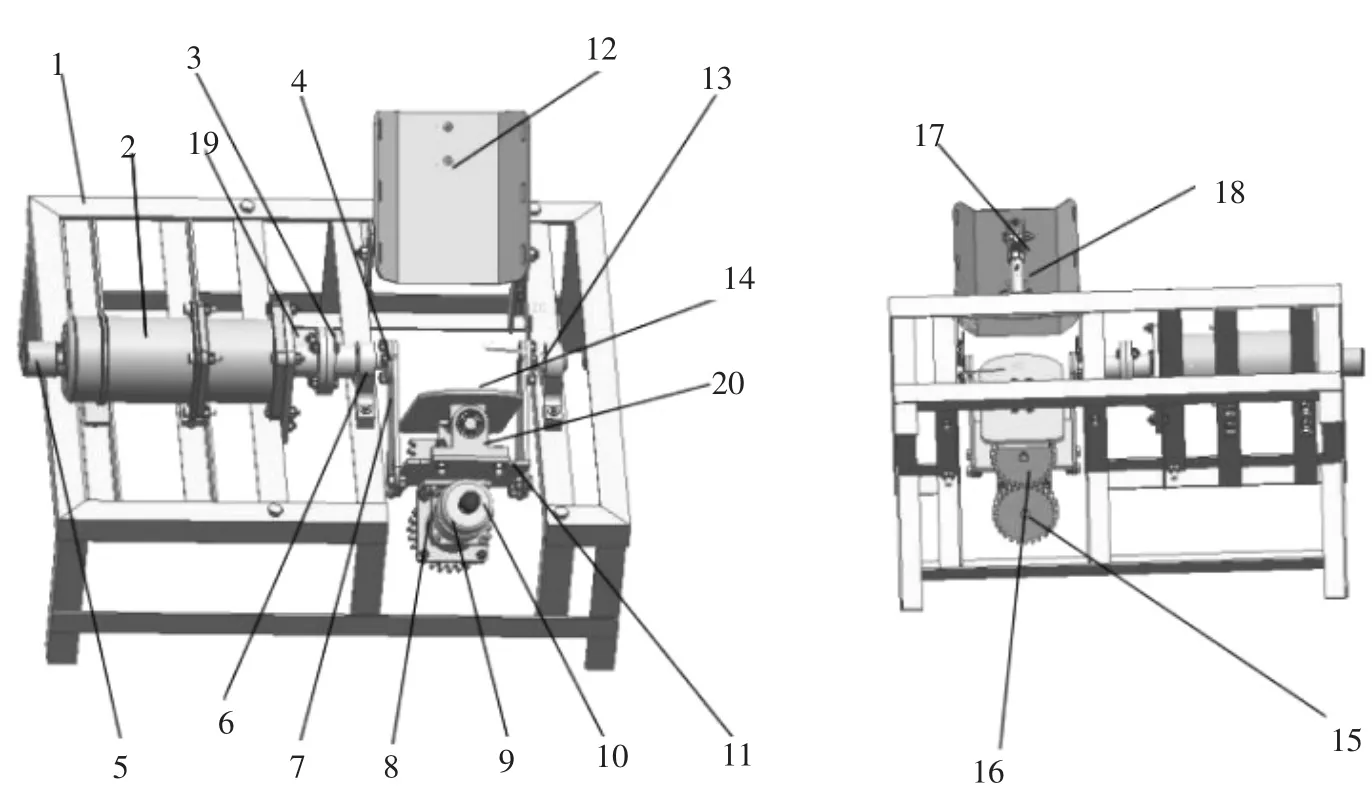
▲图1 康复装置整体结构
3 装置运动仿真与分析
UG软件的运动分析模块可以进行机构的运动干涉分析,跟踪零件的运动轨迹,分析机构中零件的位移、速度、加速度、作用力、反作用力和力矩等,从而通过修改分析结果,得出合理且满足要求的机构[7]。通过应用UG软件的运动分析模块,检查踝关节康复装置运动过程中零部件之间的干涉情况,分析旋转角度,可以有效避免在加工及实地操作时发生重大失误。
3.1 仿真模型
仿真模型创建六个连杆,第一旋转轴为连杆L001,侧板、L板、第二直流减速电机、第二编码器、底部固定板及第二轴承座固连为连杆L002,第二旋转轴为连杆L003,第一齿轮为连杆L004,第二齿轮为连杆L005,脚踏板及相关机构为连杆L006。同时根据连接关系创建六个运动副,连杆L001为旋转副J001并加驱动,连杆L002为旋转副J002并咬合连杆L001,连杆L003为旋转副J003并咬合连杆L002,连杆L004为旋转副J004并加驱动,连杆L005为旋转副J005,连杆L006为旋转副J006并咬合连杆L005。在传动副中选择齿轮副,第一个运动副选择J004,第二个运动副选择J005,比率为 1。
3.2 干涉分析
利用封装选项下的干涉项检查运动干涉,由检查分析可知,脚踏板与小腿托为90°夹角,作为运动初始位置,在背伸 20~30°、跖屈40~50°中没有干涉。内、外翻运动中,脚踏板与底部固定板发生干涉,且运动范围为23.3°,不满足内翻35~40°的要求。经过结构优化,内、外翻运动范围为54°,满足脚踏板的运动范围。
3.3 运动分析
康复装置以1 r/min旋转时,跖屈、背屈运动一周的角度曲线如图2所示。
从图2中可以看出,0~5 s从初始位置到达背伸30°,5~10 s从背伸 30°回到初始位置,10~17.88 s 从初始位置到达跖屈 50°,17.88~25.66 s 从跖屈 50°回到初始位置。
康复装置以1 r/min速度旋转时,内、外翻运动一周的角度曲线如图3所示。
从图3中可以看出,0~5 s从初始位置到达外翻15°,5~10 s从外翻 15°回到初始位置,10~23.33 s 从初始位置到达内翻 40°,23.33~36.66 s 从内翻 40°回到初始位置。
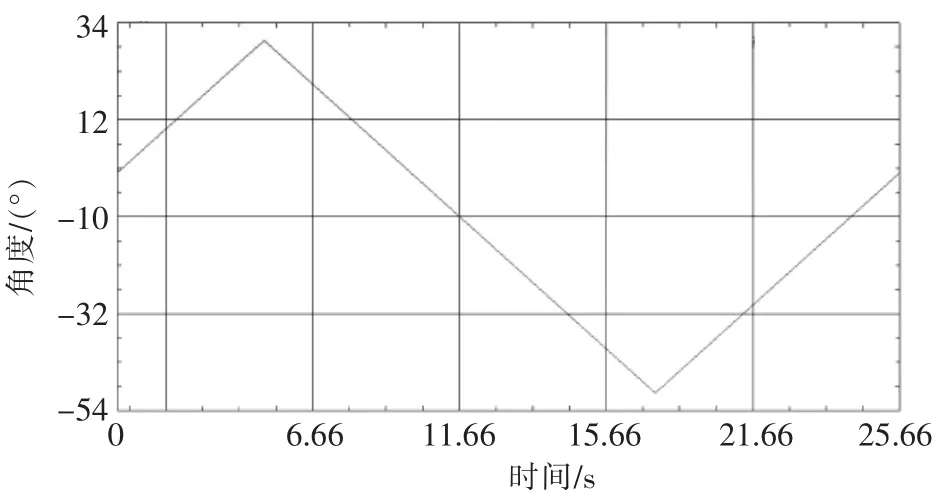
▲图2 跖屈、背屈运动一周角度变化曲线
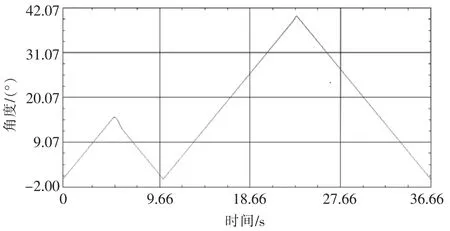
▲图3 内、外翻运动一周角度变化曲线
4 第一旋转轴有限元分析
第一旋转轴结构的可靠性对于踝关节康复装置能否正常运转而言至关重要,而且第一旋转轴也是重要的受力元件。应用ANSYS软件对第一旋转轴进行有限元分析,通过等效应力云图与位移变形云图分析应力集中对轴强度及变形的影响,以此为依据判断强度和刚度,从而提高方案设计的可靠性[8]。
4.1 有限元模型
将轴的UG三维模型导入ANSYS软件,完成线框模式的转换。根据有限元和结构分析理论可知,用三维实体单元来描述复杂实体更能反映实际状况。由于六面体单元在划分时要求结构比较规则,对轴进行六面体网格的自动划分比较困难,而用四面体单元划分三维结构比较灵活,可以逼近较复杂的几何形状,因此采用四面体单元Solid45。这一单元为8节点单元,每个节点有三个沿X、Y、Z方向平移的自由度。每个四面体单元都具有塑性、蠕变、膨胀、应力强化和大变形能力[9]。
轴的材料采用45号钢,弹性模量为210 GPa,泊松比为0.28,密度为7.8×103kg/m3,屈服强度为355 MPa,安全因数为 2[10]。网格划分采用智能网格划分,第一旋转轴划分产生节点总数为6 944个,单元总数为31 962个。第一旋转轴网格划分如图4所示。
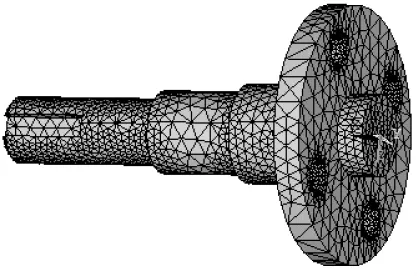
▲图4 第一旋转轴网格划分
4.2 约束及载荷
针对第一旋转轴的具体结构,进行约束分析。因为轴向由轴肩约束,所以在轴肩处施加移动约束。因为是静力分析,可以认为轴的瞬间是固定不动的,所以在轴承端施加全约束。
第一旋转轴动力从左端平键槽输入,计算得输入转矩为40 N·m。加载采用软件内力的设置指令,在平键槽面上各个节点施加集中应力[11]。
轴的材料为45号钢,安全因数为2,其许用强度为177.5 MPa。
4.3 分析结果
第一旋转轴的总位移云图如图5所示。由图5可知,轴的总位移从零件的右端向左端存在由小变大的趋势,这与加载部位和约束位置有关。在实施全约束的轴承端及螺栓孔内径处位移最小,为0~2.74×10-10mm。轴的最大位移发生在与联轴器相连的轴端,最大为2.47×10-8mm,主要由扭转所造成。从刚度方面考虑,轴的整体变形很小,满足刚度设计要求。
第一旋转轴的等效应力云图如图6所示。由图6可知,在轴肩过渡尺寸变化处,存在一定的应力集中现象,最大值为5.836 MPa,小于材料的许用应力(177.5 MPa),说明材料抗破坏能力还具有较大的潜力。
5 结束语
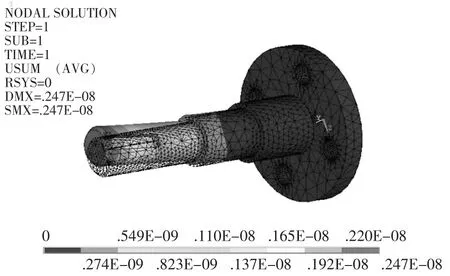
▲图5 第一旋转轴总位移云图
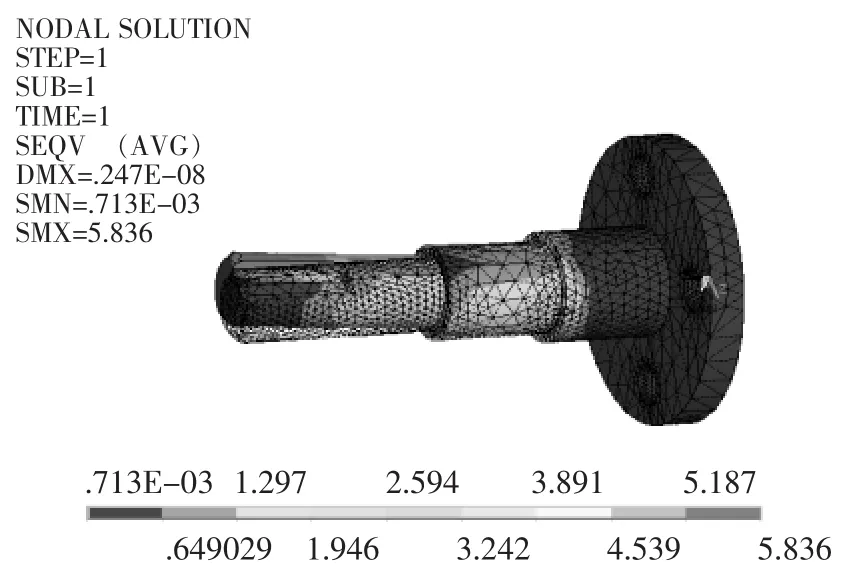
▲图6 第一旋转轴等效应力云图
为满足踝关节康复装置体积小、质量轻、携带安置方便、工作稳定和成本低等特点,基于UG软件建立了踝关节康复装置的三维模型。在这一模型的基础上,进行了踝关节康复装置的运动仿真与分析,对发生干涉的机构进行优化,仿真结果满足踝关节的运动范围要求。应用ANSYS软件对踝关节康复装置第一旋转轴进行有限元分析,通过线性静态分析,从强度方面考虑,轴的最大应力值远小于许用应力,强度满足使用要求。从刚度方面考虑,轴的整体变形很小,整体而言,轴的刚度满足使用要求。有限元分析为康复装置中轴的可靠运行提供了依据。
猜你喜欢
学苑创造·B版(2024年5期)2024-06-10 21:57:18
经纬天地(2022年3期)2022-07-20 01:17:02
装备制造技术(2020年2期)2020-12-14 03:09:26
制造技术与机床(2019年12期)2020-01-06 03:18:26
创新作文(小学版)(2017年13期)2017-11-09 07:16:32
制造技术与机床(2017年2期)2017-05-04 04:17:37
发明与创新·大科技(2016年11期)2016-11-19 02:32:00
光学精密工程(2016年4期)2016-11-07 09:04:52
汽车文摘(2015年4期)2015-12-13 20:16:32
机械工程师(2015年9期)2015-02-26 08:38:12