建立激光跟踪仪地理坐标系与六自由度测量方法的研究
2019-01-08 07:06:16姜云翔
宇航计测技术 2018年6期
汪 涛 刘 凯 姜云翔 王 强
(北京航天计量测试技术研究所,北京 100076)
1 引 言
目前,六自由度测量主要是建立在仪器测量坐标系的基础之上,比较成熟的专业测量设备有Leica、Faro等生产的激光跟踪仪。
以Leica的AT901-LR型号为例,其点位测量与六自由度测量的主要指标如表1。
在实际工程应用中,会出现被测目标距离主机架设位置大于15m测量半径的情况:如某目标高度超过20m,需要测量目标顶部在风载条件下的晃动参数;如某目标漂浮于距离岸边50m的水面,需要测量其摇摆的参数[1]。对于上述所列举的两个应用场合,其共同特征是无法将主机架设于六自由度测量半径内。

表1 AT901-LR点位测量与六自由度测量指标对比[1]Tab.1 AT901-LR accuracy of points and 6-DOF measurement
为此研究了一种基于点位测量的六自由度测量方法,并引入当地地理坐标系作为测量坐标系。
2 测量原理
2.1 测量设备构成
基于点位测量的六自由度测量需要3套主机+靶球,其测量距离与采样频率以及测量精度与点位测量的参数一致。
在引入当地地理坐标系时,需要方位基准+经纬仪,或者使用陀螺经纬仪,与目前六自由度测量方法所需设备一致。
2.2 测量基本原理
六自由度测量是指空间位置与空间姿态测量,将一个物体看作质点时所具备空间信息为位置,以该质点建立被测轴系后,被测轴系相对外部参考空间存在的旋转量为姿态。
借助外部方位基准与经纬仪,通过下述方法的测量计算,将各台激光跟踪仪测量坐标系转换为统一的当地地理坐标系。
在被测物体上取3个不共线的测量点,按照一定规则建立出被测轴系,实时同步测量3个测量点,即可以解算出被测轴系在当地地理系坐标系下位置与姿态参数。
3 测量实现
3.1 激光跟踪仪建立地理坐标系
在被测目标的外侧架设3台激光跟踪仪与1台经纬仪,在跟踪仪、经纬仪可同时通视的区域布设4个转换点。
使用方位基准或者陀螺寻北的方式,使得经纬仪获取绝对北向方位值。使用一个靶球放置于转换点Tm(m=1,2,3,4),经纬仪测量靶球的中心,记录靶球在当地地理坐标系下的方位角Hm(m=1,2,3,4)与俯仰角θm(m=1,2,3,4),激光跟踪仪Gn(n=1,2,3)测量记录靶球在跟踪仪测量坐标系下的点位数据(Xnm,Ynm,Znm)(n=1,2,3,m=1,2,3,4)。
数据采集过程中,在同一个转换点,旋转靶球进行多次采集计算均值作为测量结果,减小靶球球度误差代入。
由跟踪仪测量出T1~T4四点直角坐标后,可以按公式(1)计算出T1T2、T2T3、T3T4长度
(1)
由经纬仪测量出T1~T4相对于经纬仪极坐标后,可以按公式(2)表达为直角坐标形式
(2)
可以按公式(3)计算出∠T1JT2、∠T2JT3、∠T3JT4
(3)

G1-跟踪仪;J-经纬仪;T1、T2、T3-分别为三个转换点;θ1、θ2、θ3-经纬仪分别对三个转换点的俯仰角图1 激光跟踪仪与经纬仪对转换点测量示意Fig.1 Laser tracer and theodolite measure tranformation points
如图1所示,在J-T1T2T3构成的四面体中,使用割线迭代算法[2]计算数值解,求解JT1、JT2、JT3长度。设JT1初值为经纬仪仪器高,则有公式(4)
(4)
同理,也可由T2~T4三点得到JT2、JT3、JT4的长度,由T3、T4、T1三点得到JT3、JT4、JT1的长度,将上述的结果进行均值计算后得到JT1~JT4的长度。
以跟踪仪G1为例,测量坐标系经过旋转矩阵与平移矩阵转换后得到经纬仪坐标系[3],表达式如公式(5)
(5)
按公式(6)求差去除平移矢量
(6)
求旋转矩阵见公式(7)
(7)
求平移矢量见公式(8)
(8)
同理可以计算出另外两台激光跟踪仪的旋转矩阵R2、R3,以及平移矢量M2、M3。
3.2 多台激光跟踪仪六自由度测量
基于上述坐标系转换后,激光跟踪仪所测量的点位数据为当地地理坐标系下的输出,且多台跟踪仪与经纬仪坐标具有相同的原点。

图2 三个测量点构建直角坐标系Fig.2 Build coordinate system by three measurment points
已知某时刻A、B、C三点坐标为(XA,YA,ZA)、(XB,YB,ZB)、(XC,YC,ZC),则O点坐标如公式(9)
(9)

(10)
计算X轴、Y轴不水平度如公式(11)
(11)
计算X轴、Y轴方位如公式(12)
(12)
式(9)、(11)、(12)即为被测轴系在当地地理坐标系下的六自由度参数。当被测轴系与被测目标存在初始偏差时,需要将被测轴系转换到被测目标的坐标系上,例如被测轴系为船体的纵、横轴,被测目标为惯导设备,本文不再细述。
4 坐标转换测试
使用一台Leica TM5100A电子经纬仪和一台Leica LTD709激光跟踪仪对上述坐标转换算法进行试验。表2为激光跟踪仪与经纬仪对转换点的测量数据;表3为单台激光跟踪仪的原始测量数据,以及采用表2数据转换为地理坐标系后的数据。

表2 转换点测量数据Tab.2 Transformation data

表3 测量数据及转换后数据Tab.3 Measurement data and transformed data mm
5 误差分析
误差来源:(1)由于经纬仪北向方位的获取属于北向传递的过程,不作分析,认为经纬仪本身能够获得无误差的北向值;(2)经纬仪与激光跟踪仪在转换坐标系时的测量误差,导致激光跟踪仪坐标系与当地地理坐标系之间存在偏差;(3)激光跟踪仪测量三个点的点位测量误差;(4)三台激光跟踪仪测量不同步引入的误差,该误差只对动态测量产生影响,且与运动速度有关;(5)解算过程中的舍入误差等其他误差。
以Leica公司T3000电子经纬仪、AT901-LR为例进行概略分析,电子经纬仪角位置测量不确定度为uc=0.5″,测角误差受目标距离的影响不考虑;激光跟踪仪的点位各分量最大测量误差为0.010mm +0.008mm/m。80m边界处两点相对距离的最大误差计算如下
(0.010mm+80m×0.008mm/m)×2=1.3mm
若测点间距离为2000mm,则两测点解算姿态时两方向合成误差为
arctan(1.3mm/2000mm)=0.037°
在动态测量过程中,受到时间不同步的影响,将造成三个测量点的相对位置变化的现象,具体误差受跟踪仪与测点的布局、运动速度等影响。图3所示为最佳的测量布局(T1~T4不共面)。
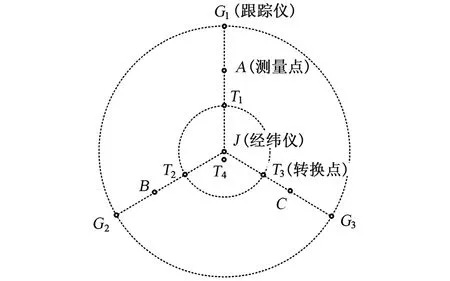
图3 转换点与经纬仪原点的相对关系图Fig.3 Transformation point and theodolite origin
6 结束语
本文所研究的测量方法,可以完成两个独立的功能,一是实现以点位测量范围进行六自由度测量,一是建立当地地理坐标系,使得所测为地理系姿态,便于惯性导航等产品测试应用。提供大范围动态六自由度测量的技术途径,其位置测量精度受坐标系转换有所降低,但其姿态测量是在点位测量的基础上得到,能够获得较高的测角精度。
猜你喜欢
防爆电机(2022年3期)2022-06-17 01:41:24
宇航计测技术(2022年2期)2022-06-01 09:34:44
装备制造技术(2021年4期)2021-08-05 07:40:24
船舶标准化工程师(2019年4期)2019-07-24 07:21:06
制造技术与机床(2018年12期)2018-12-23 02:41:18
测控技术(2018年3期)2018-11-25 09:45:50
百科探秘·航空航天(2016年9期)2016-12-01 03:04:22
系统工程与电子技术(2016年7期)2016-08-21 13:58:56
测绘科学与工程(2016年4期)2016-04-17 06:51:08
舰船科学技术(2016年1期)2016-02-27 15:39:19