
空间太阳能电站统一调度设计及电能管理分析
2019-01-07 07:37:22刘治钢朱立颖张晓峰侯欣宾陈明轩武建文
宇航学报 2018年12期
刘治钢,朱立颖,张晓峰,侯欣宾,陈明轩,武建文
(1.北京空间飞行器总体设计部,北京 100194;2. 中国空间技术研究院,北京 100194;3. 北京航空航天大学,北京 100191)
0 引 言
空间太阳能电站(Space Solar Power Station,SSPS)是在空间将太阳能收集、转换为电能,并通过无线能量传输装置传回地面,再经由地面装置转换为地面电力的系统[1]。太空发电站概念自上世纪六十年代末由美国科学家提出以来,国际上已对此研究四十余年[2]。SSPS以其近似无限供应、持续稳定、能流密度大、不受昼夜影响及清洁无污染等的优点,成为各国能源研究的重要方向。世界发达国家,特别是美国[3]、日本[4]都在积极开展研究工作,并已经取得初步成果。
SSPS功率巨大,比传统航天器高出5个数量级[5],空间超大功率电力传输与管理技术是制约太空发电站发展的核心技术,其技术水平的进步将带动空间技术的跨越式发展。SSPS系统对于大功率电能管理技术有着迫切的需求。SSPS电力拓扑结构及管理成为国际热点的研究方向之一。
2018年日本的Yermoldina GT等人[6]通过在椭圆低轨道段进行示范空间太阳能电站能量传输仿真,相关结果为在低轨道上建造示范空间太阳能电站提供了参照。2017年中国的Wang等人[7]阐述了空间能源互联网系统关键技术的一些设计挑战和解决方案,但未涉及电力系统架构及设计内容。2014年西安电子科技大学的杨阳等人提出OMEGA型空间太阳能电站架构[8]。2015年中国空间技术研究院侯欣宾等人提出了多旋转关节空间太阳能电站[9]概念方案设计,重点围绕SSPS系统架构展开。2016年杨阳等人基于SSPS-OMEGA系统介绍了光学原理,结构配置,有线和无线电力传输[11]。2017年董亚洲等人根据SSPS的工作模式给出了全面验证空间太阳能电站载荷侧微波能量传输的验证系统方案设计,对收发天线进行了一体化设计[12]。
综上,国内外目前对于SSPS的研究仍以系统架构及关键技术研究为主,对电力系统架构和能量调度策略细化设计未见报道。本文针对文献[8]提出的多旋转关节空间太阳能电站,开展电力系统架构设计及调度策略设计。提出一种环形拓扑的空间太阳能电力系统架构,拟解决SSPS超大容量空间电力传输和控制问题。针对分层架构中多太阳电池阵子阵并联(U6层),提出的采用虚拟电阻的下垂控制及MPPT混合控制策略,拟解决母线电压无法稳定的问题。
1 SSPS电力系统架构设计
SSPS电力拓扑结构如图1所示,其中由发电单元、正母线、负母线、导电关节、磁控管负载、主母线开关等部分组成。发电站拓扑采用环绕式设计,不同发电组向磁控管负载输出功率,有效减少主母线电流。其中:U6为太阳电池分阵,每两路太阳电池分阵组成一个独立旋转体,对应微波磁控管,每一个独立旋转体均在主母线侧有开关,主母线侧的能源通路可控,利于实现故障等工况下的冗余重构。
SSPS采用逐级分层功率设计原则,其中电源侧由7个层级构成,分别为:太阳能电池单板U1、最小太阳能电池阵U2、太阳电池子阵U3、子阵升压单元U4、子阵串联升压单元U5、太阳电池分阵U6,独立旋转体U7组成:
1)太阳能电池单板U1。
2)最小太阳能电池阵U2,由太阳能电池单板串联U1组成。
3)太阳电池子阵U3,通过并联扩容,构成太阳电池子阵,多个最小太阳能电池阵(U2)并联组成太阳电池子阵(U3)。
4)子阵升压单元U4,由U3接入Boost电路升压后,并接入相应变换器供带载(电推系统、蓄电池、服务系统等)。
5)子阵串联升压单元U5,U5由U4串联升压构成直流母线电压。
6)太阳电池分阵U6,U6由多个子阵串联升压单元(U5)并联构成,下图以6个U5并联为例。
7)独立旋转体U7,两个太阳电池分阵分别接入导电旋转关节,组成一对独立的旋转体(U7)。
SSPS的分层功率设计方式采用了分布式发电、分布式传输和控制的模式,且具有传输距离短、电力损耗小、可重构、系统可靠性高、易实现等优点。表1给出了空间电站分层功率设计的示例,U7独立旋转体结构功率等级达到1 MW。
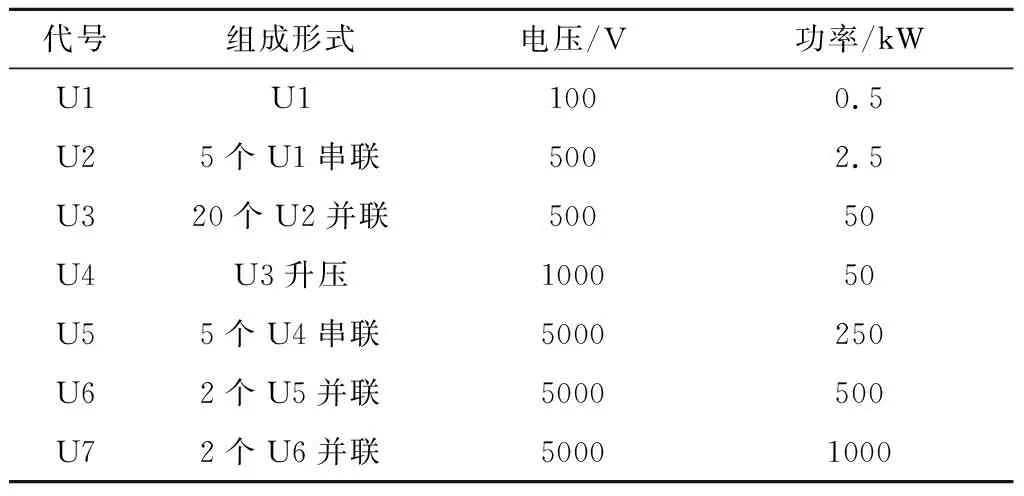
表1 空间电站分层功率设计示例Table 1 SSPS hierarchical power design example
2 分层的功率平衡控制及统一调度策略研究
2.1 分层功率平衡控制策略
目前航天器常用功率管理方案基于S3R[12]或S4R技术[13]。S3R系统由分流调节单元(SR)、蓄电池充电单元(BCR)、蓄电池放电单元(BDR)组成。S4R相较S3R型技术在母线调节及充电调节上没有电感,提高了效率和可靠性,更易模块化设计。
然而,SSPS由于功能设计与航天器不尽相同,在功率等级、体积、重量等方面均存在较大差异,因此空间发电站的能量管理方案不能直接采用航天器系统的常规模式。空间发电站无法在高压母线侧配置足够容量的储能装置,如何在空间发电站主母线侧无储能和在满足空间发电站功率输出的前提下,确保直流侧母线电压稳定是一个亟待解决的问题。
SSPS需要尽可能将光伏功率通过导电关节传输至磁控管,向地面发射。由于空间发电站的装机容量较大,其结构与地面直流微电网相似,可借鉴地面微电网的运行控制模式。
直流微网中Boost变换器的工作模式主要由MPPT、双闭环稳压、下垂控制三种方式组成。三种控制策略的合理配置和组合构成了直流微网的功率管理方案。发电站的功率变换器,既需要直流母线电压稳定的电压源工作模式,也需要有处于维持功率平衡、跟踪功率指令的电流源变换器模式。
基于前文提出的环形拓扑的空间发电站结构,以U6为控制对象,进行功率调节控制策略研究,针对MPPT、双闭环稳压、下垂控制三种控制策略的不同组合方式,进行仿真分析,假设存在T路U5升压电路并联,其中MPPT最大功率跟踪、双闭环稳压控制以及下垂稳压控制,所对应的路数分别是NM、NUd、NUI,T=NM+NUd+NUI,组成的U6太阳电池分阵单元结构如下图所示:
本文针对上述三种控制策略的组合开展研究,对于U6单元分三种控制方式:
控制策略1:光伏MPPT算法向负载供电;
控制策略2:光伏MPPT算法+稳定直流母线电压控制;
控制策略3:光伏MPPT算法+下垂稳定直流母线电压控制。
下面分别对MPPT控制算法、稳压控制、下垂控制进行介绍:
图6为MPPT控制策略框图,MPPT方式采用常用的P&O扰动观察法,光伏太阳板输出的电压电流作为MPPT控制器的输入量,通过对功率进行扰动后判断最大功率点的位置和下一次的扰动方向,最后找到最大功率点,实现MPPT控制。
图7为双闭环稳压控制策略框图,光伏Boost升压电路的输出侧电压作为控制策略的输入量,与给定期望电压值做差,通过电压外环PI控制器后,输出值与Boost电路电感电流做差,通过电流内环PI控制器后,生成占空比控制Boost电路以实现稳压控制目的。
图8为下垂控制策略框图,光伏Boost升压电路的输出侧电压和输出电流作为该控制策略的两个输入量,输出电流乘以下垂系数k后,与给定期望电压值做差,同时再与输出电压做差,差值通过电压环PI控制器后,输出值与电感电流做差,通过电流环PI控制器后,生成占空比控制Boost电路以实现稳压控制目的。
2.2 控制策略仿真分析及结果
本节以发电组U6为控制对象,建立相应的仿真模型,以对比和验证不同功率控制方案的差异和控制效果。为简化分析,设置U6发电组内由5路U5发电单元构成。仿真参数如下:U5接入太阳能电池板功率20 kW,一共5路,构成100kW的U6发电组。仿真策略如前文所示,分为三类:
(1)策略1-光伏MPPT算法向负载供电;
(2)策略2-光伏MPPT算法+稳定直流母线电压控制;
(3)策略3-光伏MPPT算法+下垂稳定直流母线电压控制。
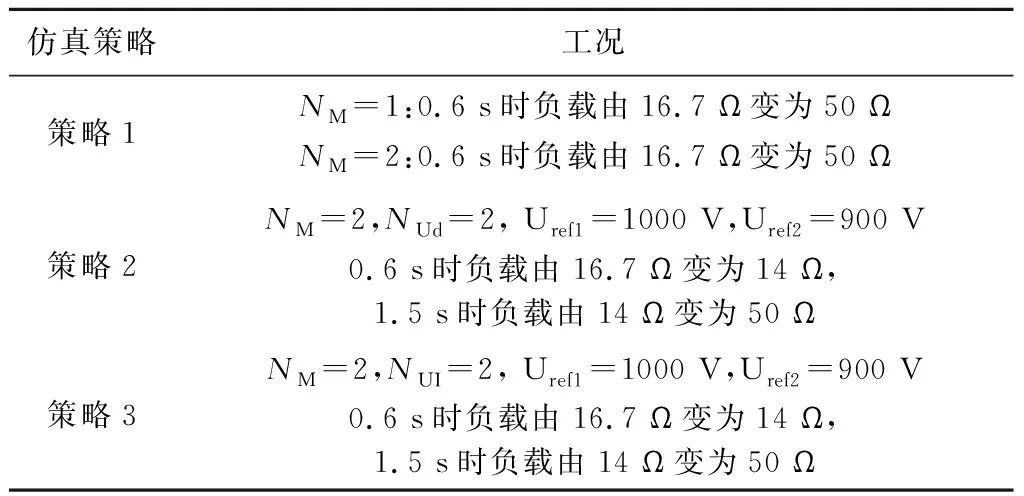
表2 仿真工况说明Table 2 Simulation conditions
假设本系统存在T路并联Boost升压电路,其中控制算法分为三类,即MPPT最大功率跟踪、直接双闭环稳压控制以及下垂稳压控制,所对应的路数分别是NM、NUd、NUI,则T=NM+NUd+NUI。电路参数及仿真参数见表3,表4所示。
(1)策略1-光伏MPPT策略下向负载供电
在仿真进行至0.6 s时,负载电阻由16.7 Ω变化至50 Ω,光伏输出功率和负载电流、电压及功率的变化如图9和10所示。
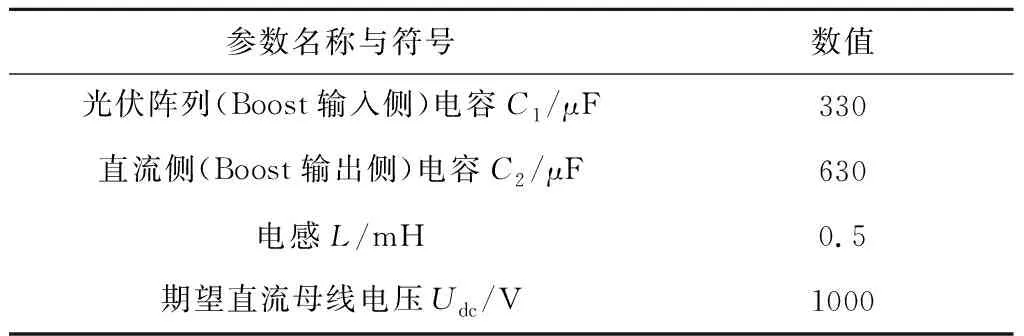
表3 Boost电路参数Table 3 Boost circuit parameters
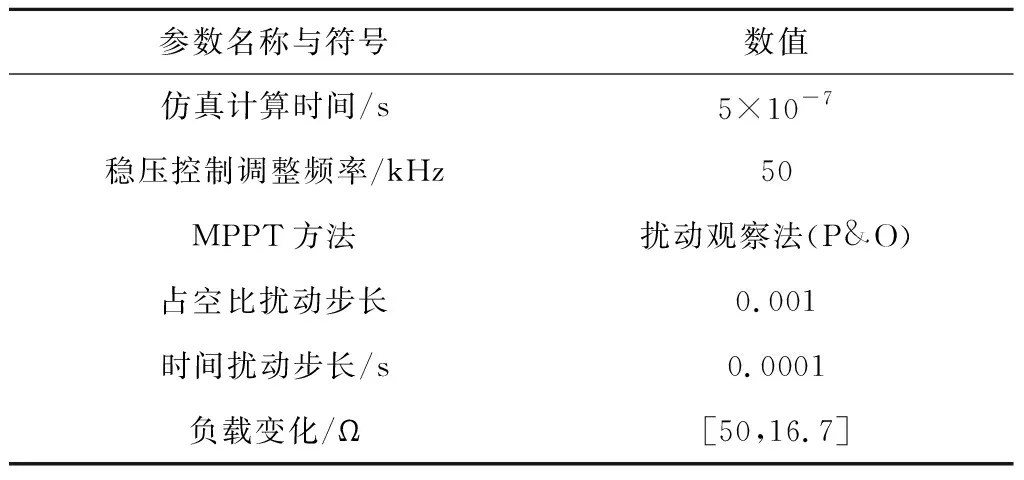
表4 仿真参数Table 4 Simulation parameters
从图9和10中可以看出,由MPPT控制的光伏发电系统直接向负载供电过程,在满足功率平衡条件下,负载电压可以稳定在由功率平衡所计算的电压值处,即满足:
(1)
其中,Pout为输出功率;Uout为输出电压;R为负载电阻;PMPPT为光伏发电最大功率。
假设NM=2,仿真在0.6 s时,负载电阻由16.7 Ω变化至50 Ω,各光伏输出功率和负载电流、电压及功率的变化如图11和12所示。
从图11和12中可以看出,由MPPT控制的两路光伏发电系统直接向负载供电过程,在满足功率平衡条件下,负载电压可以稳定在由功率平衡所计算的电压值处,即满足:
(2)
其中:NM为MPPT控制总路数;i为MPPT控制的第几路,其余参数与公式(1)相同。

由仿真工况(1)光伏MPPT算法向负载供电可知,NM路光伏发电系统并联直接向负载供电,如各路均采用MPPT算法输出功率,则负载电压将由式(2)决定,电压可以稳定,但是不能随着负载功率指令变化过程而稳定在某一固定的特定的值,此时多路MPPT变换器输出类似于电流源特性,因此单独采用多路MPPT控制法无法达到稳压的目的。
(2)策略2-光伏MPPT算法+稳定直流母线电压控制
假设NM=2,NUd=2的情况下,空间站存在长距离传输导线,线路压降导致控制目标与实际输出不可避免存在一定差异,为模拟实际工况,凸显此差异性,给定两路的期望母线电压指令不同,一路为1000 V,另一路为900 V。
当负载电阻由16.7 Ω至14 Ω再至50 Ω,仿真时间1.7 s,且在0.6 s和1.5 s处两次切换负载,所得光伏阵列输出特性、直流母线电压仿真结果如图13和14所示。
由图13和14可知,
1)0~0.19 s内,负载阻值16.7 Ω,直流母线电压从0上升,电路处于功率构建暂态,存在两路稳压控制回路共同出力过程,在高期望直流母线电压下的功率为59.88 kW<(21.96 kW×2+21.96 kW)的条件下,低期望电压回路的光伏电流向零趋近,直流母线电压向高期望电压趋近;
2)而在0.19~0.6 s内,负载阻值16.7 Ω,进入低期望电压回路完全不输出功率,由高期望电压回路稳定直流母线电压到1000 V至稳态;
3)在0.6 s~0.8 s,负载变为14 Ω,若想维持高期望电压则需向负载提供功率为71.43 kW>(21.96 kW×2+21.96 kW),则高期望直流母线电压回路希望继续输出功率,但是由光伏阵列电压功率曲线特性决定其只能向短路靠近,输出功率降低;
4)在0.8~1.2 s内,由于高期望稳压回路的光伏短路输出功率为零,而且在低期望电压下当前负载所需功率57.86<(21.96 kW×2+21.96 kW)的条件下,低期望电压回路可以稳定直流母线电压,但是受控制参数和前一阶段的误差积分影响,使处于断路的低期望回路光伏阵列输出需要时间,故此阶段直流母线电压变成由两路MPPT输出功率和负荷进行的匹配电压,即784.14 V;
5)1.2~1.5 s内,低期望电压回路输出功率,稳定直流母线电压至900 V;
6)1.5~1.7 s内,负载再度变化为50 Ω,则在低期望电压下所需功率为16.2 kW<(21.96 kW×2),则低期望电压环路失去作用,再次进入短路状态,而直流母线电压将再次由两路MPPT输出功率和负荷进行的匹配电压,即1481.9 V。
可以看出,在由多路稳压单元及多路MPPT结构下,系统可能由于线路损耗、传感器采样误差等原因的共同作用下,仅依靠稳压控制+MPPT控制方式,负载突增情况下,MPPT响应速度过慢,由于Boost电路没有吸收能量的能力,最后负载电压超过指令电压,可能出现母线电压失稳等工况。
(3)策略3-虚拟阻抗的下垂控制+MPPT混合控制策略
设NM=2,NUI=2的情况下,为凸显每一路的差异性,假设两路的期望母线电压的给定不同,一路是1000 V,另一路是900V。负载定义为[50 Ω,16.7 Ω,14 Ω,11.1 Ω],即超轻载、轻载、重载和超重载(由NM路MPPT功率、NUI路下垂稳压回路直流母线电压),负载变化与策略(2)一致,仿真结果如图15和16所示。
可以看出,在基于虚拟电阻的下垂控制+MPPT混合控制策略下,在0.6 s及1.5 s切换负载时刻前后,两路虚拟阻抗单元均输出功率,维持功率平衡,MPPT单元处于最大功率输出状态。
基于虚拟阻抗的下垂控制策略对通信依赖较小,控制策略简单、控制方式灵活、可实现即插即用,利于模块化设计。发电站系统均可以在满足功率平衡的基础上,直流母线电压稳定,在空间发电站正常运行的前提下,做到功率的最大化输出,证明了基于虚拟阻抗下垂控制策略的必要性及有效性。
3 结 论
针对目前空间太阳能电站缺乏电力系统调度策略设计问题,本文提出了一种环形拓扑的太阳能光伏空间发电站结构,并开展了设计分析和验证工作,得到了如下结论:
1)SSPS的分层功率设计方式采用了分布式发电、分布式传输和控制的模式电力系统构架由7个层级组成。解决了超大容量空间电力传输和控制的问题。
2)提出在空间发电站功率平衡基础上,以下垂控制为第一层控制策略,并进行电压恢复控制和组网控制,形成多层控制策略结构。
3)针对分层架构中多太阳电池阵子阵并联(U6层),提出的采用虚拟电阻的下垂控制及MPPT混合控制策略,解决了直流侧母线电压无法稳定的问题,开展了仿真验证工作,证明了方法的有效性。
猜你喜欢
军事文摘(2022年18期)2022-10-28 14:44:21
通信电源技术(2018年3期)2018-06-26 06:33:12
西藏科技(2016年5期)2016-09-26 12:16:43
广西电力(2016年6期)2016-07-10 12:03:37
探测与控制学报(2015年4期)2015-12-15 15:00:54
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年5期)2015-04-09 11:30:46
舰船科学技术(2015年8期)2015-02-27 15:38:50
湖北工业大学学报(2015年2期)2015-02-27 13:14:38
电机与控制应用(2013年9期)2013-11-21 08:00:04
