一种小型弹载混合式光纤惯导系统设计
2019-01-07 07:51王进达吉云飞姬占礼
宇航学报 2018年12期
王进达,吉云飞,姬占礼,鲁 浩
(1. 中国空空导弹研究院,洛阳 471009;2. 北京航天时代光电科技有限公司,北京 100094)
0 引 言
惯导系统具有独立性强、隐蔽性好、精度高、抗干扰能力强等特点,是各型武器实现自主导航的关键导航设备[1-2]。但是,由于惯性器件的误差随时间发生变化,将影响弹载惯导的导航精度,造成弹载惯导系统在列装使用后,需要拆卸下来用专用标定设备对其进行定期标校或定期首翻,严重影响了导弹的快速反应能力和贮存年限。从新一代战术导弹的发展趋势来看,未来的惯导系统需要更长的使用和贮存年限,而现有惯导系统已无法满足新的技术需求。
混合式惯导系统是继平台式惯导、捷联式惯导和旋转式惯导后新的发展方向之一,该系统具备“自标定、自检测、自对准”的功能,可实现在整弹条件下完成弹载惯导系统内惯性器件的参数标校,以有效解决弹载惯导系统免拆弹标定的应用需求,实现弹载惯导系统自主保障。
1992年美国人Don提出通过在弹载惯性测量单元中内置转位机构实现免拆卸标定,形成了“三自”混合式惯导的设计雏形[3]。目前在国内已经开展相关领域的研究工作,2016年冯培德院士全方位地论证了混合式惯导的概念、特点及其关键技术,并通过样机研制验证了混合式惯导技术的工程应用价值[4];翁海娜等在混合式惯导技术的基础上,提出一种系统级在线自主标定方法[5];刘冰奇等针对混合式惯导系统自标定的特点,设计了一种静基座条件下的快速标定方法[6]。目前为止针对混合式惯导系统的研究文献并不多,且大多主要应用于船舶和大型地地导弹,在混合式惯导小型化方面研究较少。此外,对惯导关键技术之一-标定技术也主要集中在对滤波器[7]、标定方式[8-9]及快速性[10-11]等单一性能的研究,在混合式惯导的应用中还缺少一种能够充分利用其自身特点的综合性标定技术。
针对这种问题,本文在论述弹载混合式惯导特点的基础上,重点开展小型混合式光纤惯导系统的小型化设计技术、惯测单元的高可靠锁紧技术及抗扰动自标定技术,其中在抗扰动自标定设计过程中,综合运用了基于ADOP的自标定流程设计、降维Kalman滤波及抗扰动技术,最后完成了原理样机研制及试验验证工作。
1 混合式光纤惯导技术特点与结构组成
1.1 技术特点
混合式惯导是由“平台”到“捷联”,再由“捷联”到“捷联+转位”的“类平台”形式。其工作状态主要分为两种:一种是转位工作状态,以实现弹载惯导系统地面环境自标定及自对准;一种是捷联工作状态,保证导弹飞行可靠性。其兼具平台式惯导、捷联惯导两种系统的优点,这三种系统的特点对比如表1所示。
1.2 典型组成
弹载混合式惯导系统组成框图如图1所示,主要包含惯性测量单元和双轴转位锁紧机构。前者主要包含由三轴光纤陀螺、三轴石英挠性加速度计构成的惯性测量内核,以及由信号处理与接口电路、IF转换电路、二次电源电路、温控电路等功能电路构成的电子线路组件,其中惯性测量内核放置于转位机构中心,电子线路组件放置于转位机构外围;后者主要包含内、外框旋转轴系和锁紧轴系,以及必要的电机驱动电路和转位控制电路等。

表1 三种惯导系统特点对比Table 1 The characteristics of the three inertial navigation systems
2 弹载小型混合式光纤惯导系统设计
混合式惯导系统若要应用于小型战术导弹中,需根据其特点进行适配性设计。首先,小型战术导弹普遍体积较小,弹径小于400 mm,如俄罗斯的R37为380 mm,欧洲流星空空导弹为203 mm;其次工作环境恶劣,要求惯导系统抗振动、抗冲击能力强,稳定性好;最后,可维护性高,具有免拆弹自标定特点。根据以上特点,对混合式惯导在弹载应用的研究可从三个方面开展:小型化设计技术、抗振动高可靠锁紧技术、自标定技术等。
2.1 小型化设计技术
弹载混合式惯导小型化设计技术主要包含三个方面:
a) 电气一体化设计技术
电气一体化信号处理系统如图2所示,其单板高度集成了惯性测量系统中数据采集及处理电路、I/F转换电路、温控电路,以及双轴转位锁紧机构中电机驱动电路、转位机构控制电路、测角旋变采集电路,以及红外及行程开关检测电路等。
通过多核DSP分区、分时钟实现小型战术导弹用混合式惯导惯性器件及其它传感器数据采集及处理功能、混合式惯导自标定功能、双轴转位锁紧机构驱动及控制功能,在提高战术导弹用混合式惯导电磁兼容特性的同时,实现了混合式惯导与转位机构之间的数据共享与高速通信,进一步实现系统的小型化设计。
b) 惯性测量内核小型化设计技术
惯性测量内核双轴转位机构的转子部分,其直接影响小型战术导弹用混合式惯导的外形及体积。基于三轴一体光纤陀螺仪设计,具有结构紧凑、便于空间配置的设计特点,通过合理配置转动包络约束下的光纤环,可以有效实现小型战术导弹用混合式惯导的小型化设计。
图3所示为优化设计后的三轴一体光纤陀螺仪原理框图,在满足技术指标需求的前提下,不仅通过共光源完成三轴一体光纤陀螺仪的设计,同时采用基于ASIC的三合一陀螺仪信号处理电路和小型石英摆式加速度计,进一步降低惯性测量内核体积,实现弹用混合式惯导小型化。
依据武器平台的不同,其制导精度对惯导不同轴向惯性仪表的精度需求略有不同,三轴一体光纤陀螺仪可在满足系统功能及精度需求的前提下,通过三轴优化配置不同尺寸的光纤环,可以实现惯性测量内核转动包络的最小化设计,例如本课题在进行某型产品研制过程中,提出了“两大一小”的光纤环配置方案。
2.2 抗振动高可靠锁紧技术
为了确保小型混合式惯导系统在飞行中的可靠性,可采用锁紧机构将惯性测量内核抱死锁定方法,通过整体减振系统设计,降低导弹过载及持续振动环境对弹载混合式惯导系统精度的影响。
典型锁紧机构设计方案如图4,其采用两套自锁定装置对惯组进行锁紧,锁紧过程中通过步进电机完成定齿盘与惯组上动齿盘的啮合和脱开,由于端齿盘啮合过程刚度足够大,确保外界力学环境可以不放大传递至惯性测量内核。
两套自锁定装置均有升降机构,不同处是一套自锁定装置推动滑动螺母做往复直线运动,完成滑动螺母与惯组上的顶杆啮合和脱开,另一套自锁定装置是推动定齿盘做往复直线运动,完成定齿盘与惯组上动齿盘的啮合和脱开。两套自锁定装置同时作用在惯性测量内核上,共同完成对惯性测量内核的锁定。
2.3 基于降维Kalman滤波器的抗扰动自标定技术
混合式惯导系统自标定技术基于导航误差传播特性,不依赖高精度参考输入基准,实现以低精度测试设备标定高精度捷联惯导。其基本思路是,通过内置双轴转位机构对惯性测量内核进行多位置翻转,实现误差激励环境下的“对准+导航”,从而完成惯性器件误差分离。
2.3.1惯导系统误差模型
一般而言,需要标定的惯性器件误差参数主要包括光纤陀螺仪及加速度通道的零位、标度因数误差和安装误差等[12]。建立基于加速度测量坐标系的惯性测量单元自标定参数误差模型如下式。
(1)

2.3.2基于ADOP可观测度的自标定流程设计
ADOP方法是一种以姿态精度为基础的可观测度分析方法[13]。在混合式惯导进行自标定时,以ADOP为依据设计特定的惯测内核旋转方案能够增强状态的可观测度,从而提高对惯测器件参数的估计精度。
考虑到Kalman滤波在离散化过程中方程为递推形式,那么其离散后的方程可改写为:
(2)
其中
(3)
Φk,k-n表示k-n时刻到k时刻的状态转移矩阵,且有Φk,0=Φk,k-1·Φk-1,k-2,…,Φ1,0,mk表示k时刻系统等效噪声向量,wk、vk分别为原系统状态噪声与量测噪声向量,并且mk,wk不相关。为了构造与ADOP相关的观测矩阵,对于k个量测量,构造下式:
Z=Hx0+U
(4)
式中:
(5)
定义协方差阵:
Rk=Cov(Uk)
(6)
实际应用中,与量测量相关的状态所对应的系统噪声较小,忽略量测噪声方差阵R阵非对角块的值:
R=diag(R1,R2,…,Rk)
(7)
由于x0是随机向量,其均值和协方差可以表示为
(8)
那么可以得到在考虑x0初始误差影响条件下的协方差阵:
(9)
采用ADOP可观测度作为分析标准,那么系统状态方程的可观测度可由P矩阵对角元素表示。由于P对角线元素描述了对应状态的误差方差,因此其收敛的越小,对应状态变量的可观测度越高。以光纤陀螺零偏和安装误差为例,其可观测度曲线见图5、6,从图中可以看出,相应于P矩阵对角线元素,在1000 s出现快速收敛,表现出较强的可观测性。在惯性测量内核中存在外框与内框同时转动的现象,而根据ADOP在初始状态的可观测度,需要通过外框进行大角度转动并持续较长时间来激励陀螺误差的产生,当可观测度收敛后根据外框与内框的协调转动来激励其他器件误差的产生。
根据以上对ADOP在惯测内核组件的可观测度特性分析,其自标定流程可设计18次有序翻转,实现惯性测量内核绕各轴向均正转及反转三次,并且使各轴向均朝天及朝地不少于两次。前两次转动持续时间为300s,其他转动持续时间均为180s,依据可观测度分析结论可以实现惯性仪表全部参数可观,自标定流程如表2所示。
2.3.3降维卡尔曼滤波器设计
惯测单元自标定过程中利用惯性测量内核“静止-翻转-静止”的转动流程,前两个阶段对应惯导工作在对准状态,然后进入导航状态,在不同状态分别完成各项误差参数的迭代估计。
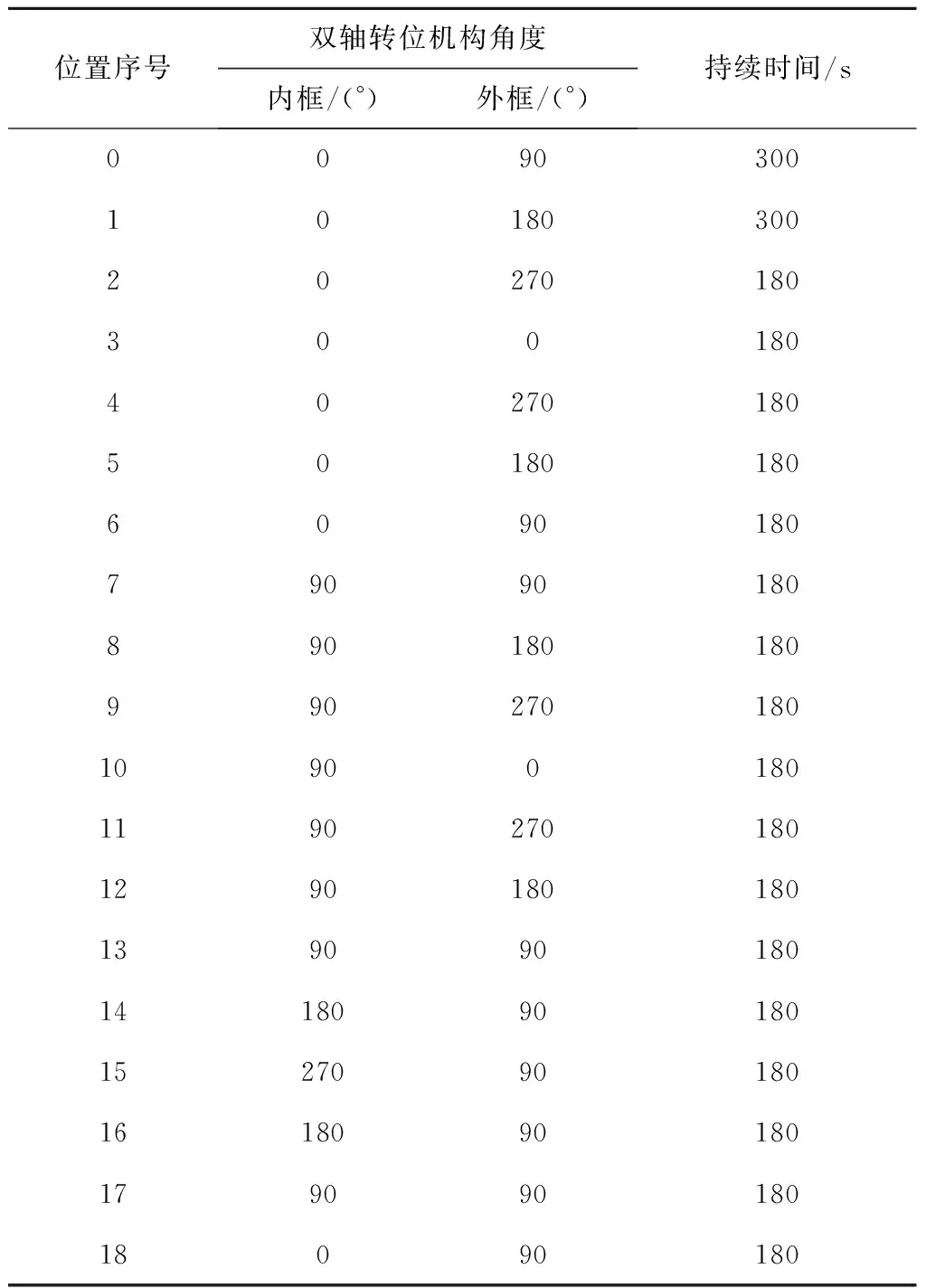
表2 惯性测量内核自标定流程Table 2 Self calibration process of optical fiber inertial group
设导航坐标系为n(东-北-天地理坐标系),惯测单元自标定过程中速度误差方程和姿态误差方程描述如下:
(10)

(11)
对式(11)速度误差方程展开、整理可以得到混合惯导自标定过程中的参数误差方程为:
(12)
其中a1、b1、b2、c1、c2为惯性测量内核参数组合,εi(i=x,y,z)为高阶项,可当成噪声处理。以位置0到位置1翻转为例,通过式(10)、式(12)对其进行分解,可以得到与器件参数相关方程:
(13)
同理,可以完成18次翻转过程标定参数组合的定义。从式(13)可以看出,和惯性仪表有关的零位误差、标度因数、安装误差等参数可用式(13)的5个参数来表示。因此混合式惯导自标定过程中仅将上述参数组合引入至Kalman滤波器,而无需将惯性仪表全部误差参数引入,即可完成混合式惯导自标定过程中的降维设计。
由此,状态向量可以设计为:
X=[δvx,δvy,δvz,φx,φy,φz,a1x,a1y,a2y,a1z,a2z]T
最终形成以三维速度误差、三维失准角误差、五项参数组合构成的十一维状态,并以系统静止过程中的速度误差为量测,完成上述参数组合的估计。
2.3.4抗扰动自标定技术
在利用卡尔曼滤波技术进行精对准时,传统方法是直接利用速度误差的瞬时值作为滤波观测量[14-16]。而没有考虑速度误差瞬时值中噪声与震荡耦合项带来的误差。在实际有扰动的条件下,混合式惯导真实速度在零附近会出现震荡现象。
从上节式(12)可以看出,除与时间相关的线性项外,导航速度误差的主要组成是速度趋势项。因此为了抑制震荡产生的影响,可以提取导航速度变化趋势作为速度误差估计,对式(12)进行最小二乘处理,经处理后的真实速度误差迭代计算如下式所示:
(14)
3 弹载混合式光纤惯导原理样机及试验验证
3.1 弹载混合式光纤惯导原理样机
小型弹载混合式光纤惯导原理样机如图8所示,该样机外形为Φ245 mm×225 mm,重量小于15 kg。
3.2 弹载混合式光纤惯导系统级标定试验验证
通过对弹载混合式光纤惯导进行分立标定和自标定试验,对其标定重复性进行对比,标定结果如表3。
通过表3的对比结果来看,弹载混合式光纤惯导系统自标定与分立标定均可以完成惯性器件各项其中陀螺零偏最大为0.0047(°)/h,陀螺标度因数误差最大为1.8×10-5,加速度计偏值最大为2.2×10-5g,加计标度因数误差最大为1.2×10-5。试验表明,弹载混合式光纤惯导自标定结果与分立标定结果几乎一致,证明了弹载混合式惯导自标定技术的正确性,可以满足弹载应用需求参数的分离,并可以得到相近的结果。需要指出的是,由于分立标定和自标定的参考坐标系不同,因此无法直接量化比较二者的安装误差参数,后面将通过动态导航验证自标定技术中安装误差参数标定的正确性。

表3 惯性测量内核标定结果重复性对比Table 3 The comparison of repeatability from results of calibration of fiber optic inertial assembly
3.3 弹载混合式光纤惯导锁紧可靠性及力学环境适应性试验验证
弹载混合式光纤惯导研制过程中对其力学环境适应性进行了充分考核,其中振动输入条件为国军标规定的电子产品环境筛选实验条件,图9为振动台截取的惯组内核处的力学响应曲线,其中117 Hz为弹载混合式惯导减振器的谐振频率。从图中可以看出,混合式惯导振动过程中,除减振器谐振频率外,未见明显谐振放大的频率点,表明其力学环境未见明显放大传递至惯性测量内核处,证明了混合式惯导锁紧机构设计的合理性,样机设计具有较强的复杂力学环境适应性。
3.4 弹载混合式光纤惯导角动态导航精度试验验证
将弹载混合式光纤惯导放置于三轴转台之上,初始对准完成后,驱动三轴转台依序进行三轴向±180°旋转,分别采用混合式光纤惯导分立标定参数和自标定参数进行纯惯性导航,其位置误差见图10,其中自标定参数位置和水平方向速度误差精度明显优于分立标定参数,其原因在于自标定技术将惯性仪表坐标系统统一在加速度计坐标系上,而分立标定方法则由于对高精度标定设备的依赖而无法实现惯性仪表坐标系的空间统一,从用户使用方面证明了混合式光纤惯导的应用优势。
4 结束语
弹载混合式光纤惯导作为基于“捷联+转位”的“类平台”新型惯导系统设计技术,可实现弹载光纤惯导系统的免拆卸自标定,减少小型战术导弹维护成本,提高使用和长期贮存年限,显著改善弹载惯导系统的作战性能。本文重点针对战术导弹用小型混合式光纤惯导关键技术进行研究,就其小型化设计技术、免拆卸自标定技术、抗振动高可靠锁紧技术等提出了切实可行的技术途径。经过原理样机的研制和试验,验证了设计方案和自标定算法的正确性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
计算机系统应用(2022年5期)2022-06-27
舰船科学技术(2022年10期)2022-06-17
今日农业(2021年9期)2021-07-28
现代装饰(2021年1期)2021-03-29
数字海洋与水下攻防(2020年5期)2021-01-04
中国计算机报(2019年12期)2019-06-21
北京航空航天大学学报(2018年1期)2018-04-20
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年1期)2015-01-09