船舶电站自动调频调载方案设计
2019-01-05 03:41华春梅
船舶职业教育 2018年6期
华春梅
(渤海船舶职业学院,辽宁兴城125105)
0 引言
随着自动化技术的发展,船舶设备的自动化程度越来越高,其对电力供应的需求也越来越大,现代船舶对船舶电站的自动化程度及其可靠性和安全性也提出了更高的要求。[1]
船舶电站是整个船舶的重要核心之一,由原动机(柴油机)、发电机和主配电装置组成。船舶电站自动化需具备两个基本条件:一是发电机组的起动和停机、并车和解列、负荷分配、频率调节等以及必要的保护功能必须实现自动控制,这是单元自动化;二是在单元自动化基础上,各个单元按逻辑关系联系起来,自动运行,形成船舶电站自动化系统。各个单元功能中,发电机组的频载调节是船舶电站自动调节的重点与核心。
船舶电站并机与解列都会引起负荷变化,这不但会导致发电机的转速与输出功率发生变化,主电网上的频率和电压也会随之改变,进而影响在网设备的正常工作。为保证船舶电站正常工作,如满足主电网频率恒定、各发电机组有功负载均匀分配等,船舶电站柴油机需要具备自动调速功能。由此可见,电站的频载自动调节目标是船舶电站运行的稳定性与可靠性。
1 船舶电站电网变化规律
设发电机组转速为额定转速且偏差很小,额定转速为基准值,则由能量守恒原理,发电机功率平衡方程为:

式中:PY为原动机(柴油机)的有效功率;PF为负载消耗的有效功率;△P为机电损耗;TC为发电机惯性时间常数。若原动机为柴油机,则PY决定于柴油机的供油量大小。电网负荷稳定时,转速变化率dn/dt=0;电网负载增大,即PF突然增加时,由于柴油机功率PY不能及时增加,存在滞后现象。
由上面公式可知,为保持平衡,dn/dt<0,机组转速降低,使电网频率降低;同理,电网负载减小,发电机转速增加,dn/dt>0,使电网频率升高。这是因为PF突然减小,而柴油机功率不能及时减小,为保持平衡所致。因此电站负载变化会使电网频率产生波动,可以在实船电站中配备调速器,使柴油机转速稳定,以保证电网频率稳定,在允许的范围内变化。
2 调频调载
船舶电站中的各发电机组并车运行,电网的功率分配是指有功功率分配(恒频)和无功功率分配(恒压),[2]无功功率分配通过发电机的自动调压器的无功电流补偿或者环流补偿即可解决,一般不再另外配置。有功功率分配是主要研究问题。
作为原动机的柴油机均配有机械或液压调速器,由调速器特性可知,可采用“有差特性法”调整频率以实现有功功率的自动分配。即通过选配有差特性的调速器,使各个机组按机组容量比例承担电网负载的变化。这种方法即为电网频率“一次调节”。
2.1 电网频率“二次调节”——虚有差法的调频调载
通过上述电网频率的“一次调节”,虽能使负荷自动按机组容量分配,但电网频率往往产生偏离。这就需要再次对其进行调节,成为电网频率的“二次调节”,使电网频率保持在额定范围内,实现有功功率的合理分配。实现方法有按负载频率特性调节和按功率差和频率差调节,功率差和频率差调节即“虚有差法”。[3]“虚有差法”应用广泛,研究的是有功功率(恒频)分配调节,[4]系统框图如图1所示。

图1 按功率差和频率差调节系统框图
设两台并车运行发电机组容量相等,U为船舶电站电网电压,i1和i2为各发电机电流,F为电网系统频率,取50 Hz,A1模块计算输出并车时各发电机组的频率,即电网频率,A2模块计算输出在网各机组功率,A3模块计算输出各机组平均功率,A4模块为比较模块。
具体工作过程是由综合调节模块A5计算出综合功率差(发电机组实际功率与平均功率之差)和频差后(电网实际频率与设定值之差),输出指令调节柴油机调速器的设定值,进而调节各发电机组的功率分配和电网频率,使其保持在合适的范围。输出信号用于调节变频器的设定频率。
2.2 负荷转移
负荷转移也称负载转移,是指发电机组解列即退出并联运行时,其承担的功率由其余在网运行机组承担,主开关才能分闸。在这一过程中,既要避免调整时间过长,也不能出现电网频率波动过大的现象。否则会造成发电机组功率分配不均(有功功率),使机组过载,甚至有可能使有的分闸机组转入电动机状态,出现逆功率情况。这将使主开关跳闸,保护装置发生动作。
负荷转移方案可以借助于调频调载方案实现。当船舶电站机组并联运行时,如起货机、电动锚机等负载经常变化,各柴油发电机调速器都力图按照各自的动态特性稳定工作。由于各机组的动态特性相差较大,因此,在此过程中频率和有功功率的分配必定不均匀,有较大变化。在负载频繁变动的过渡期内,为避免调速器装置频繁动作造成振荡和磨损,自动调频调载装置一般都采用延时介入。当系统稳定后,由于各机组调速器的有差特性,系统的频率和功率分配就会出现静差,承担负荷转移的自动调频调载装置只是在这时介入,根据这个偏差进行调整。
3自动调频调载硬件设计
以船舶电站两台柴油发电机组的并车、解列为例,进行调频调载功能设计,搭建控制平台。上位机选用工控机,下位机选用西门子S7-300系列PLC与两台丹麦DEIF公司的PPU(Protection and Parallel Uni)t相结合来实现船舶电站调频调载功能。其中S7-300PLC同时控制两台PPU,而每台PPU则控制对应的柴油发电机机组。
3.1 PPU工作原理
PPU单元能够进行发电机组同步控制、负荷转移、调速器和自动调压器控制开关量输出等控制功能,还具有逆功率、过流等保护功能,同时还能够显示交流电所有相关监测参数等。PPU对发电机组的各项监控功能以及与PLC间的信号连接如图2所示。
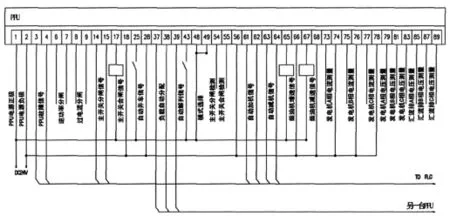
图2 PPU信号接线图
对于负荷转移时易出现电网频率波动而造成过载、逆功率等现象给电站设备造成损害的情况,设置6-9号端子接收检测逆功率、过电流等信号,输出分闸信号,避免电站设备损害。
并车信号由61号端子发出,同时25号端子负责接收此信号,实现自动并车及主开关自动合闸;解列时,信号由63号端子发出,同时43号端子负责接收此信号,实现自动解列和主开关自动分闸;54、55号端子反馈主开关的合闸与分闸信号,如果合闸失败,输出报警;船舶电站工作的自动调频调载,实质就是发电机组的速度调节,由65-68号端子输出调速信号给电子调速器,实现发电机组的增减速;37、39号端子为负荷分配线,实现有功负荷和无功负荷在并车时的功率均匀,在解列时进行负荷转移。
3.2 PLC控制过程
结合PPU端子信号,设计PLC不同模块功能,输出响应功能信号和报警信号。图3为PLC功能模块接线图。
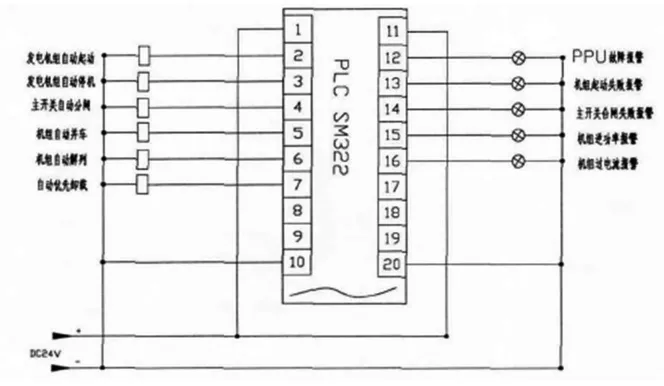
图3 PLC信号接线图
PLC接收PPU发出的并车信号,立刻作出相应反映。当增机待并机组处于停机状态时,先起动待并机组,PLC接收到稳定运行反馈信号后发出自动并车信号;当增机待并机组处于稳定运行状态,PLC直接发出自动并车信号,实现并车。需要注意的是,在并车时可能发生待并机组无法自动合闸,则需要自动优先卸载,把次要用电设备从主电网上断开,以供主要电气设备的正常运行,保证船舶安全运转避免发生意外。当PLC接收到PPU的解列减机信号时,就不存在机组停机或运行状态的检测,PLC直接发出自动解列信号给PPU。此时的分闸信号要有一个滞后,等待负荷转移(包括功率分配和频率稳定) 完成后,PLC才发出自动分闸信号,使待解列机组与电网断开,在解列机组运行一段时间后,PLC发出自动停机信号,解列机组停机。
在实现船舶自动调频调载时,还设计有故障报警、待并机组启动失败报警、主开关合闸失败报警、逆功率与过电流报警等,由PLC发出报警信号,报警指示检查排除。
4 自动调频调载控制流程设计
自动调频调载控制功能的设计思想是以保证电网频率稳定并使各个机组的负荷均匀分布为目的。自动调频调载控制流程图如图4所示。其中设置死区范围是因为船舶电网功率的绝对均匀是不可能的,过分追求这一指标会使调速开关长期反复动作,并引起振荡。所以当功频差在死区时,调速开关不动作;当参数超过死区范围时,调速开关才动作。

图4 发电机组自动调频调载控制流程
5 结论
通过对船舶电站功率分配特点以及调频调载理论的研究,提出了应用PPU和PLC联合控制船舶电站调频调载的方法,设计了船舶电站自动调频调载方案,搭建了船舶电站调频调载控制平台,使控制功能和显示功能更加方便实现,使功率分配更加精准,频率更加稳定,对实际应用具有一定参考价值。
猜你喜欢
山东冶金(2022年4期)2022-09-14
中学生数理化·中考版(2021年12期)2021-12-31
能源工程(2021年5期)2021-11-20
建材发展导向(2019年5期)2019-09-09
通信电源技术(2016年4期)2016-04-04
西部广播电视(2015年9期)2016-01-18
西部广播电视(2015年9期)2016-01-18
海军航空大学学报(2015年4期)2015-02-27
新疆钢铁(2015年3期)2015-02-20
中国设备工程(2014年1期)2014-02-28