基于SD-ABMS方法的航空应急医疗转运任务仿真系统*
2019-01-05 02:08占艳丽郭勇陈
中国安全生产科学技术 2018年12期
占艳丽,王 鹏,郭勇陈,沈 洋
(1.南京航空航天大学 经济与管理学院,江苏 南京 211106;2. 海丰通航科技有限公司,北京 100070)
0 引言
航空医疗救援能力是一个国家综合国力的重要体现,在军用和民用领域都有很高的应用价值[1-2],目前我国航空医疗救援产业仍处于发展阶段,与部分发达国家相比仍存在较大的差距[3]。现有航空医疗救援的研究场景仍局限于军用[4]和大型灾害场景下[5-7]的医疗后送场景,民用场景下的研究十分有限,且研究内容多处于概念构想层次[8-10],研究方法多是在对病患到达、检伤分类、医疗后送等流程进行简化的基础上进行建模和仿真[4-5]。Morin[11]和Plischke[12]认为,有效的应急管理和响应需要彻底了解救援行动及其相互作用,而对救援流程的可视化研究可以极大地促进该活动。2018年6月16日,昆明1架救援直升机在执行医疗转运任务时不幸坠毁,引发关于我国航空应急医疗转运产业发展的思考,而目前关于具体的航空医疗转运任务执行流程及专业医疗转运队伍的协同操作机制等方面的研究较少。
航空医疗转运是在当本地的医疗救治条件和水平不能满足伤患的需求时,使用医疗直升机将病患转运至合适医院的一系列活动的总称。转运任务的执行需要各部门救援人员高效沟通、协同到位,执行结果会同时受实时任务特征、救援队能力和救援环境的影响。这对救援人员技术能力和非技术能力提出了高水平要求,需要结合实际演练加以训练,但由于国内可用的直升机数量较少,救援演练成本高昂,可以开展实际演练的次数有限。
本文旨在采用多主体仿真(ABMS)技术和系统动力学(SD)技术,从微观视角研究航空医疗转运任务执行机理,进行建模仿真,并在此基础上实现通用航空应急医疗转运任务系统可视化原型,为航空医疗转运实时任务评估研究建立基础,进一步降低演练成本。
1 通用航空应急医疗转运问题分析
1.1 主要参与部门和人员界定
1次航空医疗转运任务的参与部门有转运需求方、转运请求医院和转运承接医院;专业航空医疗转运队伍包括飞行员、随机机务、随机医生和随机护士4个救援主体。
1.2 航空应急医疗转运流程
航空应急医疗转运流程如图1所示,航空应急医疗转运任务由病患求救触发,转运请求医院评估病情,如果超过其治疗能力,向转运承接医院申请转运,转运承接医院综合考虑距离、环境、病情、救援队水平等多方面因素对转运任务进行评估,如果符合转运条件,派遣专业救援队伍执行转运任务,进入图2所示的转运子流程,需要说明的是:整个转运任务执行既包括去程也包括返程,由于返程病患在直升机上,因此看似相同的流程块的操作内容及重点不尽相同。
1.3 建立抽象层次
并非所有实体都可以用Agent来描述,需要对实体、对象、Agent加以区分。如图3所示,依据组成结构将系统划分为转运请求医院分系统、转运承接医院分系统、转运需求分系统和环境分系统,各分系统拥有对应的Agent,各Agent之间通过消息交换和信息交互的方式实现分系统Agent之间的物质和能量交换,相互协同完成航空应急医疗转运流程。

图1 转运任务产生流程Fig.1 Generation process of aeromedical transport mission
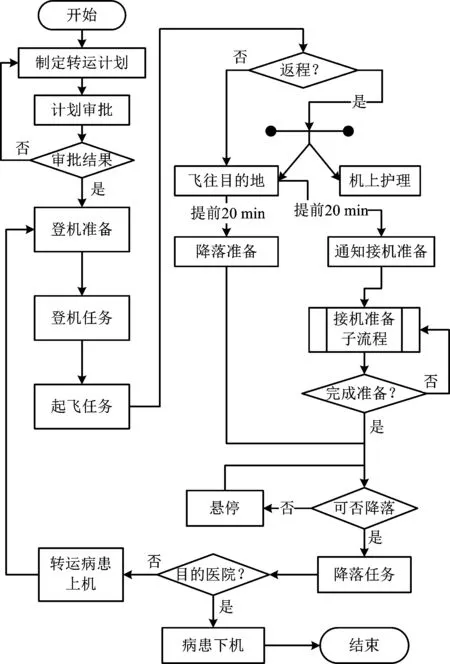
图2 航空应急医疗转运流程Fig.2 Process of aeromedical emergency transport
2 基于ABMS方法构建概念模型
在航空应急医疗转运任务系统中,16种Agent及3种对象会产生一系列独立及协同完成任务的离散行为和连续行为,Agent间的协同行为约束使得任务可按照标准流程执行,同时各Agent及对象的行为还会导致Agent及任务的内部状态发生改变,包含离散状态改变和连续状态改变。为刻画航空应急医疗转运任务系统,使用ABMS技术对各Agent的离散行为进行建模,通过Agent间的协同行为约束对转运流程进行建模;使用SD方法对Agent的连续行为及连续状态变化进行建模。

图3 航空医疗转运任务系统抽象层次Fig.3 Abstract level of aeromedical transport mission system
多主体系统的全局承诺是1组有关组织结构、组织过程的约束和策略的集合,航空应急医疗转运任务系统的全局承诺如式(1)所示。
TraModel=〈struct,metaphor〉
(1)
式中:TraModel表示系统组织模型;struct表示组织结构;metaphor表示组织原则。
2.1 系统组织结构
系统的组织结构如式(2)所示。
struct=〈Φ,Role,Re,Goal,Gr,Ω〉
(2)
式中:Φ表示智能主体集合;Role表示组织职能集合;Re表示责任分配集合;Goal表示组织目标集合;Gr表示承担某组织职能的成员之间的相互关系集合;Ω表示系统的外部环境。
1)智能主体集合
Φ=〈A1,B1,…,B4,C1,…,C7,heli,E1,…,E3〉
(3)
式中:A1表示病患Agent;B1~B4依次表示转运请求医院负责人、医生、护士和保安Agent;C1~C7依次表示转运承接医院负责人、飞行员、随机机务、随机医生、随机护士、地面机务和保安Agent;heli表示转运承接医院直升机Agent;E1~E3依次表示意外产生Agent、人为意外Agent和环境控制Agent。
2)组织职能集合
组织职能集合表示系统中各主体参与的所有职能的集合。航空医疗转运任务系统的组织职能集合表示如式(4)所示。
Role=〈R1,R2,…,Rm〉,m=47
(4)
式中:求救R1、病情评估R2、病情上报R3、抬担架R4、检查病患R5、病患上机R6、清场R7、异物清理R8、地面安全检查R9、地面安全控制R10、秩序恢复R11、请求转运R12、院间协调R13、院内指挥R14、降落指挥R15、任务评估R16、方案审批R17、制定方案R18、任务指挥R19、直升机控制R20、飞行意外处理R21、协调沟通R22、机内安全检查R23、机内安全观察R24、机内安全控制R25、救护指挥R26、协调签字R27、机内监护及救治R28、救护意外处理R29、直升机检查R30、起飞指挥R31、观察地标R32、安全意外处理R33、安全检查R34、承载R35、转运R36、意外捕捉R37、意外生成R38、环境控制R39,启动R40、起飞R41、飞行R42、悬停R43、降落R44、变速R45、设定飞行目标R46、病患待机准备R47。
3)责任分配集合
责任分配集合表示的是智能主体集合与组织职能集合的对应关系,某智能主体所参与的所有组织职能的集合即该智能主体的能力,责任分配集合表示如式(5)所示。
(5)
4)组织目标集合
系统目标为协同转运请求医院、转运承接医院、专业转运队伍等多方力量以及直升机、机载设备等专业的医疗设备对病患进行紧急转运,将病患转运到合适的医院,完成转运目标。
5)相互关系集合
转运承接医院负责人为本医院内部指挥;转运请求医院负责人为本医院内部指挥;飞行员为任务执行总指挥;随机医生为救护总指挥;随机机务为机内安全控制总指挥。
6)外部环境
系统的外部环境指可能会对系统发展产生影响的突发天气状况,不可控意外事件等。
2.2 系统组织原则
系统的组织原则如式(6)所示。
metaphor=〈Kds,Tds,Ccs〉
(6)
式中:Kds表示知识分布策略;Tds表示任务分布策略;Ccs表示协同控制策略。
1)知识分布策略
为了充分体现救援主体技术能力水平和非技术能力水平对转运任务执行效果的影响,模型提供如表1所示的接口用来输入从历史训练数据中学习得到的各救援主体个性化参数。
2)任务分布策略
使用转运请求医院地理位置及病患病情对实时转运任务进行表示,模型将转运承接医院地理位置标记为
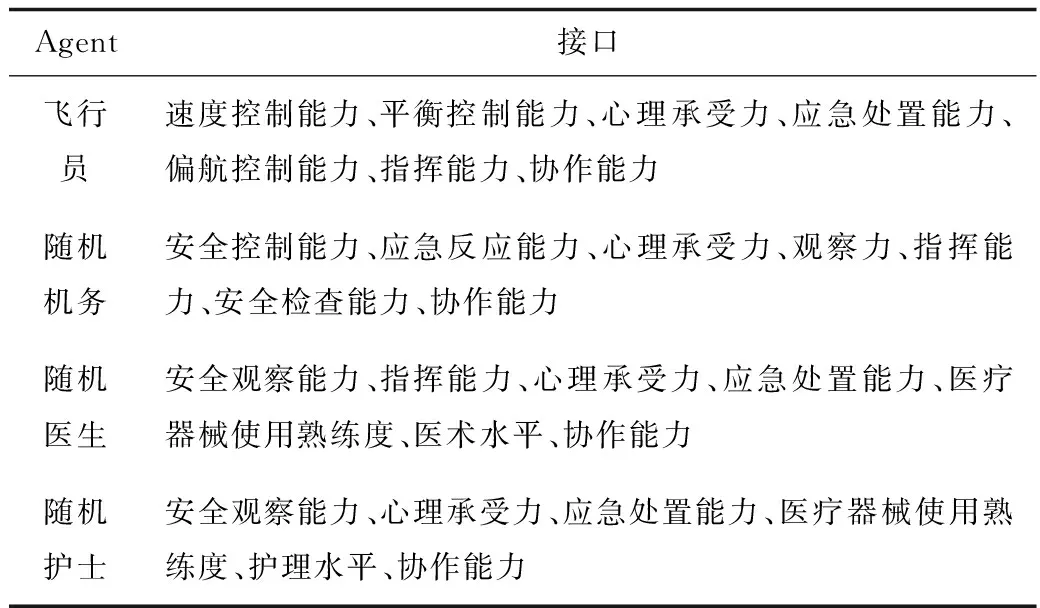
表1 专业航空医疗转运队伍个性化参数接口Table 1 Personalized parameter interfaces of professional team
(0,0,0),转运请求医院的地理位置是基于转运承接医院的相对坐标,为(x,y,z);病患病情使用剩余时间t表示(t过小将不存在救援价值)。实时任务表示如式(7)所示。
task={(x,y,z),t}
(7)
当转运任务来临时,需要从转运承接医院的专业救援队员库、转运资源库中为任务分配合适的专业救援人员和救援资源。
3)协同控制策略
①单纯指令式协同
主体执行下个操作必须得到特定主体的特定内容的指令。单纯指令式协同是任务执行过程中最基本、使用最频繁的协同方式。通过消息传递机制实现单纯指令式协同。
②任务并行式协同
任务需要多个主体的共同参与,每个主体完成任务中属于自己的部分,率先完成的主体会进入等待状态,任务完成时,所有参与主体才能进入其他状态。控制策略为:完成任务的时间为用时最长的主体花费的时间,例如病患安全检查,如式(8)所示。
Ttask=max(TΦ1,TΦ2,……,TΦn)
(8)
③任务同步式协同
任务需要多个主体共同参与,并且各主体必须时刻保持同步,任务才能有效进展,例如:抬担架。相应的控制策略为:所有参与主体完成任务的速度都会受到最慢主体的影响,因此任务的完成速度为最慢主体的速度,如式(9)所示。
VΦ1=VΦ2=…=VΦn=Vtask=
min(VΦ1,VΦ2,……,VΦn)
(9)
④指令交互式协同
主体执行下一操作必须得到特定主体的特定内容的指令,同时,该主体执行任务的效果依赖于其协同主体的某种特性。比如:飞行员控制直升机的过程。控制策略为:使用消息传递机制传达特定指令,并通过调用接口传参的方式对其他主体执行任务效果施加影响。
⑤并联式协同
任务有多个主体共同参与,各主体单独完成任务且互不影响。比如:直升机飞行时所有救援主体都会进行安全观察,各主体并不会同时发现同1个紧急状况。控制策略为:完成任务用时最少的主体所用时间为任务的最终完成时间。
Ttask=min(TΦ1,TΦ2,……,TΦn)
(10)
3 基于SD方法的连续行为建模
系统需要对以下连续行为进行系统动力学建模:位置变动(各参与主体)、心态变化(各参与主体)、病情变化(病患)、位置变化(直升机)、速度变化(直升机),下文以病患病情变化和直升机控制为例进行说明。
3.1 病患病情变化SD建模
病患的病情变化受3方面因素影响:病患病情会随着时间自然恶化;随机医护正确及时的救护会提升病患生命值;救援人员的不当操作会对病患病情造成进一步的伤害。
假设病患病情会随着时间以速度tv0恶化,当出现不当操作时,会因其影响程度传递不同的伤害值hurtv,当病患处于被救护状态时,会因其医护水平传递给病患不同的恢复值rescuev,用t表示病患自然流失的生命值累积,用hurt表示病患因专业救援队不当操作流失的生命值累积,用rescue表示病患因有效救护增加的生命值累积,用time表示病患目前的剩余生命值,病患病情初始化为t0,则:
(11)
病患病情变化SD建模结果如图4所示。
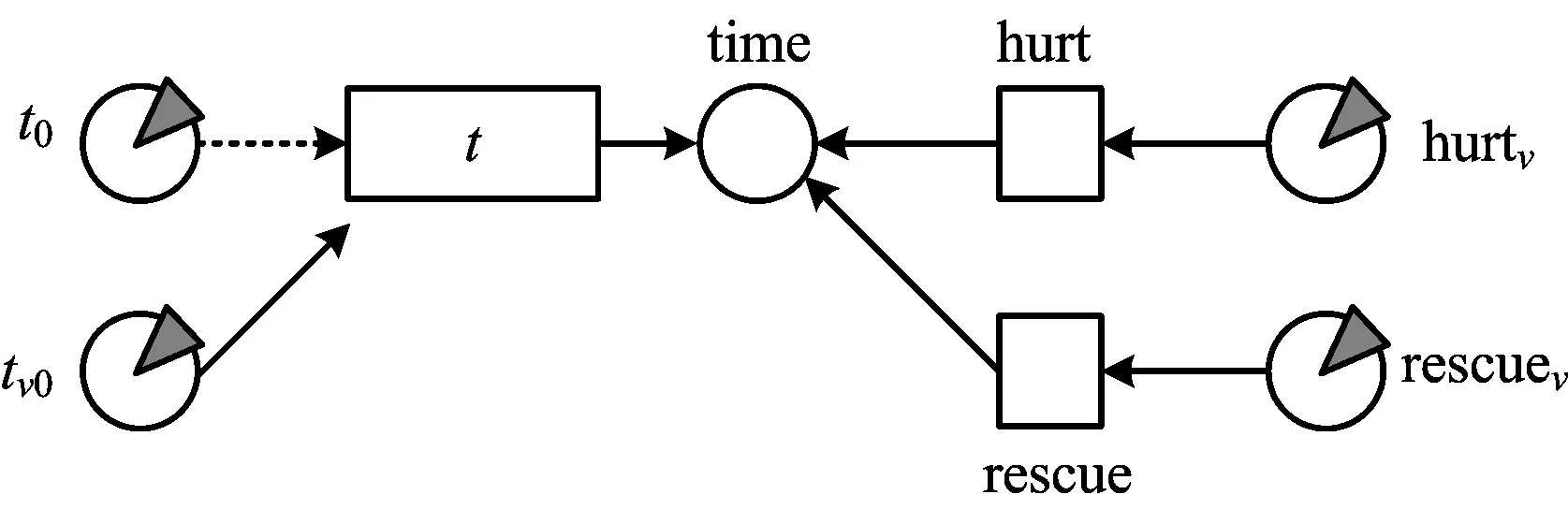
图4 病患病情变化SD模型Fig.4 SD model of patient’s conditions
3.2 直升机SD建模
直升机Agent是标准的反应型Agent,飞行员(pilot)通过直升机提供的接口向直升机发送命令、设定飞行目标、改变飞行参数等方式对直升机进行控制。直升机基本参数表示如下。
初始位移:(x0,y0,z0),x0,y0,z0≥0;实时位移:(x,y,z),x,y,z≥0;飞行目标:(tx,ty,tz),tx,ty,tz≥0;飞行员计划飞行速度:Speed0,Speed0≥0;飞行员速度控制能力:sc,sc∈[0,1];飞行员偏航控制能力:gc,gc∈[0,1]。
3.2.1 速度控制建模
直升机的实际飞行速度Speed因受到随机因子rv的影响,往往会偏离计划飞行速度Speed0,飞行员速度控制能力sc即表示随机因子对直升机实际飞行速度的影响程度,sc为1时,Speed将不受rv的影响;sc为0时,rv对Speed将产生较大影响,如式(12)所示。
Speed=Speed0+(1-sc)*rv
Speed0≥0 sc∈[0,1]
(12)
3.2.2 偏航行为
直升机偏航行为是直升机偏离原来航线和原飞行目标的行为,飞行员的偏航控制能力gc越接近1,对路线的控制能力越强,飞行受随机因素rg的影响越小,越可以较好地保证飞行遵循原设定目标;gc越接近0,对飞行路线的控制能力越弱,飞行受rg的影响越大,直升机偏离原飞行目标越远,偏航后的目标位置以(gtx,gty,gtz)表示,如式(13)所示。
(13)
3.2.3 直升机实时位移建模
使用(x,y,z)表示直升机的实时位移,直升机的实时位移可以通过其初始位移(x0,y0,z0)及其动态飞行速度向量(vx,vy,vz)进行表示,如式(14)所示。

(14)
式中:直升机的动态飞行速度向量是带有方向的向量,其计算方法如式(15)所示。
(15)
基于SD的直升机综合建模结果如图5所示:

图5 基于SD的直升机飞行综合建模结果(包含速度控制,目标控制,偏航控制和实时位移显示)Fig.5 Integrated SD model result of helicopter flight which includes speed control, target control, yaw control and real-time displacement of helicopter
4 仿真模型实现及检验
4.1 仿真实现及可视化
Anylogic是一款可以对离散、系统动力学、多智能体和混合系统建模和仿真的工具。本文使用Anylogic平台,采用多主体仿真技术和系统动力学技术相结合的方式,对通用航空应急医疗转运任务系统进行仿真实现,并对系统进行可视化,包括病人求救、起飞、飞行、悬停、降落等视景,如图6所示。

图6 直升机正飞往目标医院Fig.6 Helicopter is flying to the target hospital
4.2 模型检验
通用航空应急医疗转运任务仿真模型构建的最重要的任务就是参与主体之间协同性的建模与实现,主体之间的协同性往往是通过多主体之间的有效交互实现的。因此,有必要对模型的交互性进行检验,结果如表2所示,需要说明的是,除上述职能外,各主体还存在“等待”等非职能状态,用以实现与其他主体之间的协同,表中用w表示。
1)实验1说明
直升机到达目标医院前10 min ,随机医生会通知目标医院负责人到达时间,医院负责人会提前安排医护人员和保安进行接机准备,医护人员和保安准备好后会通知医院负责人,医院负责人持续观测直升机状态,如果直升机已经到达医院上空并且地面准备工作已经就绪,会给飞行员下达降落指令,飞行员执行降落控制;否则直升机会一直处于悬停状态。由此可见,各主体的个人行为会因为其流程协同性而影响到救援行动的整体执行效果。在其他主体的参数都保持不变的情况下,将转运请求医院医护人员进行病患待机准备的时间从3 min改变为7 min,直升机处于悬停状态的时间由0.5 min变为4.5 min,实验证明:仿真模型较好地实现了各主体之间的指令式协同行为。
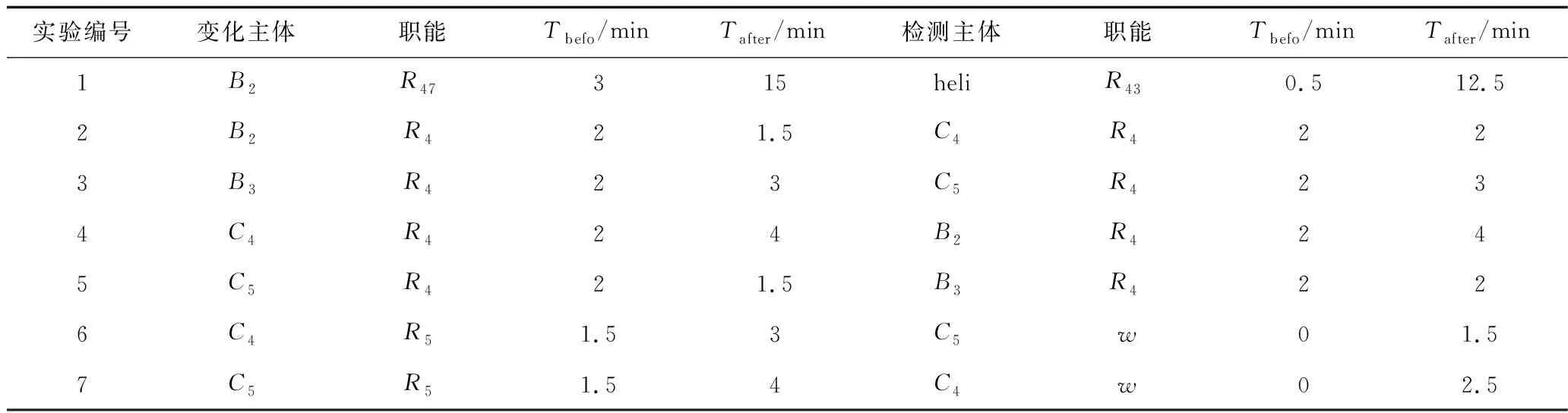
表2 航空应急医疗转运任务仿真模型关键节点交互性检验实验结果Table 2 Key nodes interaction test results of aeromedical emergency transport mission system
2)实验2~5说明
在抬担架职能中,随机医生、随机护士、医生和护士的初始操作时间均为2 min,任何1个主体速度变慢导致用时超过2 min,其他主体的用时也会与该主体保持一致,相反任何1个主体加快速度预计用时低于2 min,该主体最终用时仍保持2 min不变,这是由于各主体在抬担架过程中必须保持同步,各主体速度均会受到最慢主体速度的影响。实验证明:模型较好地实现了任务同步式协同。
3)实验6~7说明
在病患检查职能中,随机医生和随机护士的初始完成时间均为1.5 min,加长任何主体完成病患检查的时间,另1主体由于已经完成本职工作将会处于等待状态。实验证明:模型较好地完成了任务并行式协同。
5 结论
1)在真实的航空应急医疗转运场景基础上,抽象出16种Agent和详细的医疗转运流程,展示航空应急医疗转运任务执行机理。
2)使用基于ABMS技术和SD技术的混合建模方法,从微观层面对各Agent的离散行为、交互行为和连续行为进行建模,实现航空医疗应急医疗转运任务仿真模型,并验证模型的有效性,为后续进行复杂的科学研究,尤其是航空应急医疗转运实时任务评估研究奠定基础。
3)基于Anylogic平台实现航空应急医疗转运任务系统可视化原型,可用于航空应急医疗转运任务执行流程及细节展示,进一步降低相关演练成本。
4)如何进一步完善可视化模型,以及将现有仿真模型、历史训练数据和任务执行数据结合起来,用于任务决策支持与安全控制,是后续研究的重点。
猜你喜欢
环球时报(2022-09-15)2022-09-15
军事文摘(2022年15期)2022-08-17
趣味(作文与阅读)(2021年11期)2021-03-09
趣味(语文)(2021年11期)2021-03-09
智慧健康(2019年7期)2019-01-30
医药前沿(2018年35期)2018-12-07
中国社会历史评论(2016年2期)2016-06-27
IT时代周刊(2015年7期)2015-11-11
海峡姐妹(2015年3期)2015-02-27
中国医药指南(2015年26期)2015-01-24