履带板加热炉自动上下料系统设计与仿真分析
2018-12-29 03:40
制造业自动化 2018年12期
(辽宁科技大学 电子与信息工程学院,鞍山 114051)
0 引言
履带板是履带式设备的关键部件,其热加工处理是生产制造的关键工序,目前国内的履带板热加工生产线系统还停留在手工操作阶段[1]。由于人工上下料存在效率低、安全性差等问题,现引进工业机器人,实现履带片的自动上下料过程。热加工处理生产线具有产量大、环节多和工艺复杂等特点,因此在投入生产前对机器人上下料系统进行设计与仿真分析,可以提高精确度,节约工作时间。
DELMIA为企业用户所开发的产品提供了一套完整的数字化制造解决方案[2]。在实际的生产线改进之前,利用DELMIA软件在虚拟空间建立整条生产线的模型,对机器人进行离线编程和路径规划,对生产流程进行模拟仿真,分析出最佳方案,可以在不接触工作环境的情况下,在三维软件中提供一个和机器人进行交互作用的虚拟环境[3,4]。
工业机器人在钢铁、汽车、电子、船厂及航空航天等行业已经得到了广泛的应用[5],但在其他工业领域应用很少。本文利用DELMIA实现工业机器人自动上下料过程,研究结果表明,该设计方案能够应用在实际的热加工处理生产中,从而代替人工操作,可以有效地提高生产率,降低劳动强度,减少危险。
1 创建工作环境
DELMIA自带三维建模工具CATIA机械设计,也可以利用一些常用的三维建模工具包括UG、SoildWorks、Pro/E等[6],本文利用自带工具CATIA将制作好的零部件导入到DELMIA中。本文利用DELMIA自带的机械设计模块创建零部件,并且搭建工作环境,保证虚拟环境与现实工作环境的一致性。将加热炉、履带片、履带片摆放架和履带片货物台作为资源导入DELMIA虚拟环境中[7]。从资源目录中导入工业机器人,在DELMIA的机器人库中提供了大量的机器人。例如,瑞士ABB机器人、日本FANUC机器人、日本安川机器人、德国KUKA机器人等等[8]。本文应用德国KUKA公司的六自由度KR210L150K_S2000型机器人。运用以上产品构建履带板生产线虚拟环境,如图1所示。
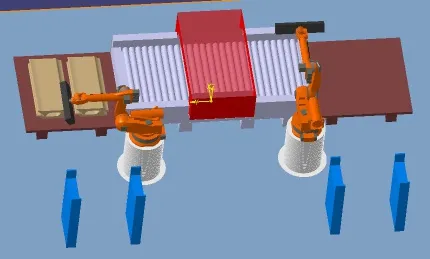
图1 履带板热加工生产线布局
2 机器人工作过程仿真
实际的履带板热加工处理过程中,主要通过人工搬运履带片实现上下料。本文通过使用工业机器人代替人工来完成履带片自动上下料过程。在整个过程中,主要实现机器人对履带片的抓取与放回。在投入生产之前,使用虚拟软件对机器人的工作路径进行设计与规划,以保证机器人各个工位的动作能够顺利进行。
本文使用DELMIA的Device Task Definition模块对机器人进行离线编程并对工作路径进行仿真。
2.1 末端执行器的建立
履带片的表面是光滑平面,且材料是钢铁制造,其工具(工业机器人的末端执行器)可以使用电磁铁,因此电磁铁对履带片的抓取与放回成为仿真的难点。电磁铁需要有两个坐标,分别为Base Frame坐标和TCP Frame坐标。如图2所示。

图2 电磁铁的Base Frame坐标和TCP Frame坐标
Base Frame的作用是将工具安装在工业机器人的末端执行器上。TCP Frame为工业机器人的工具坐标,当对机器人示教时,其工作路径就是通过TCP Frame工具坐标经过各个Tag点所形成的。如图3所示。机器人的TCP Frame坐标默认为末端的执行器,通过Set Tool指令将电磁铁的TCP Frame和机器人的执行器相连接,实现工具的精确安装。

图3 机器人Tag点分布
2.2 示教机器人
将机器人的Tag点通过Teach a device命令连接在一起形成运动轨迹,如图4所示。
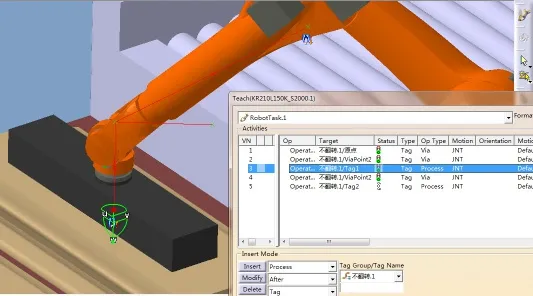
图4 机器人示教
在示教过程中为了实现电磁铁对履带片的抓取与释放动作,运用ADD a Process Operation指令对轨迹添加Pick和Drop功能,如图5所示。
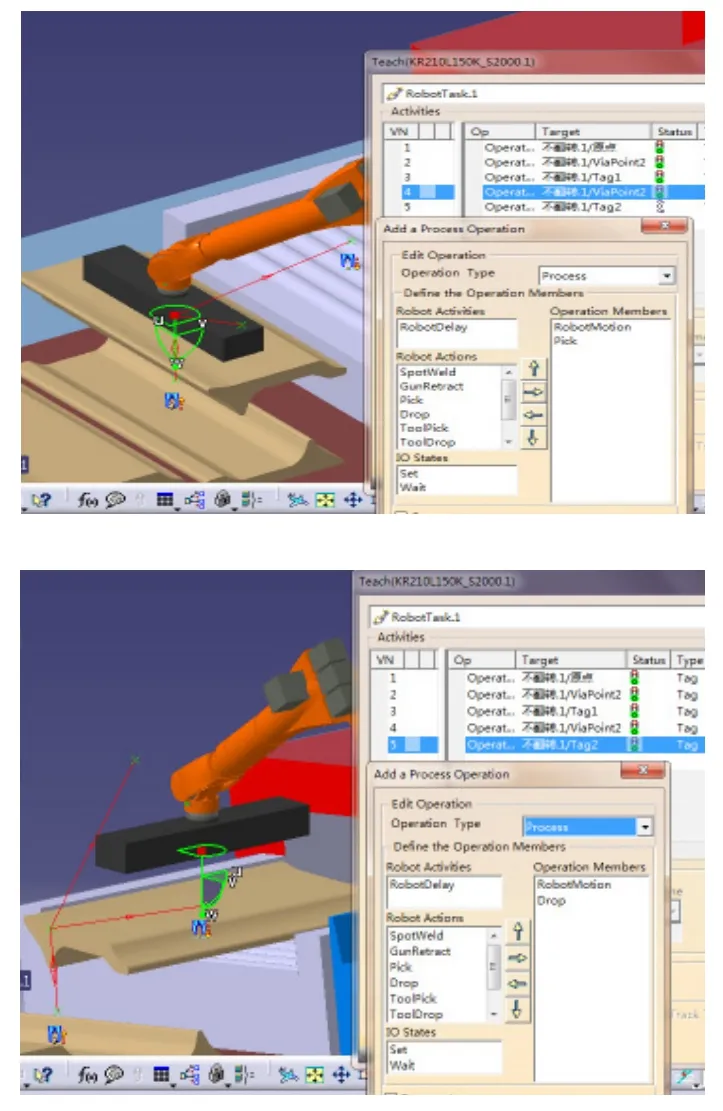
图5 抓取与释放动作的实现
2.3 机器人路径规划
根据机器人工作的特点,一般把机器人末端的位置和姿态作为研究对象。DELMIA的IGRIP模块对机器人的运动学和逆运动学进行奇异性分析,可通过目标点给出合适的逆解,来实现机器人的位姿状态[9,10]。
在Sequence工具栏下使用Set TurnNumbers命令,让机器人按照最小旋转角的方式进行运动,从而实现机器人路径的优化,如图6所示。
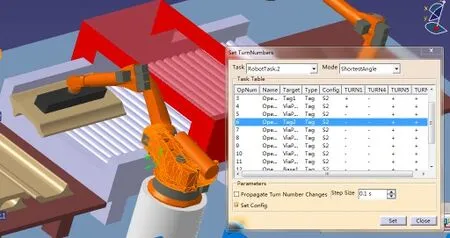
图6 机器人路径规划
2.4 碰撞与干涉检测
在机器人仿真过程中,由于工位上设备分布密集,工位加工空间相对狭小,因此在机器人的整个运作当中极有可能出现机器人与加热炉、摆放架和货物台等之间的碰撞。在实际的工业中,都不只是一台机器人,可能会有多个机器人一起协作完成任务。
DELMIA的Robotics机器人仿真操作模块提供了专业的碰撞和干涉分析工具[11]。该模块借助数学来实现碰撞分析。在Simulation analysis tools工具栏的Clash下对所有的产品和部件进行碰撞和干涉的检测,并且对碰撞的部件之间进行分析。例如,两个部件之间可以算出接触距离,运动机构可以算出碰撞的距离等等。在Simulation analysis tools工具栏中还有一个碰撞检测开关,可以检测机器人与其他设备之间有无碰撞。在运动仿真时,当发生碰撞时,仿真会自动停止,并生成红色警示区域,给出状态报告。状态报告可供工程师研究,这样可以重新对产品进行装配,减少了一些重要设施和设备的碰撞。
3 自动上下料系统过程仿真
DELMIA的制造数字化工艺DPM模块能够提供整体的工艺流程。DPM Assembly Process Simulation模块中主要生成履带片的动作,并利用该模块下的PERT图将机器人的动作与履带板的动作结合,实现机器人的自动上下料系统的仿真过程。
履带片的动作主要是通过加热炉的热处理过程中,并利用PERT图将机器人离线编程生成的动作与履带片的动作结合,如图7所示。采用PERT图可以对整个工艺流程进行调整,有助于工艺设计和模拟工艺工程师准确地分析和优化[12]。
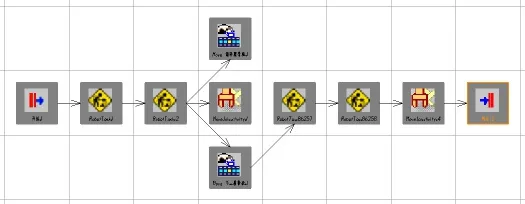
图7 PERT工艺流程图
在该模块下可以运用Gantt图可以计算出整个流程的运作时间,如图8所示。由图可知该设计方案的Process时间为232s,和人工操作比,效率很高。

图8 工艺流程甘特图
4 结论
机器人自动上下料系统设计与运动轨迹仿真是热加工处理的重要环节,对履带板生产线起着重要的作用。本文利用机器人自动上下料系统设计与仿真分析,成功代替了人工操作。利用DELMIA的robotics模块,对工业机器人进行离线编程,有效地将机器人运用到其他制造业中。利用DELMIA的DPM模块将机器人与履带板的动作有效地结合一起,通过调整和优化,提高了生产效率,减少了工作时间,为企业提供了一套完整的数字化制造解决方案。
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02
科学技术创新(2021年22期)2021-08-16
防爆电机(2021年2期)2021-06-09
兵器装备工程学报(2021年3期)2021-04-09
通信电源技术(2020年21期)2020-03-06
赢未来(2018年5期)2018-09-25
成长·读写月刊(2018年3期)2018-03-24
科教导刊·电子版(2016年2期)2016-03-12
中国铸造装备与技术(2015年5期)2015-12-10
科技视界(2014年6期)2014-12-24