融合多道面数据挖掘算法的交通安全监测系统
2018-12-22 01:08:54徐荣,魏莉
信阳农林学院学报 2018年4期
徐 荣,魏 莉
(安徽广播电视大学 信息工程学院,安徽 合肥 230022)
随着交通信息技术的快速发展,需要对交通事故进行准确有效监测,以实现对道路交通事故导致拥堵问题的快速解决[1]。如果在交通监测模块中出现预警、告警提示,那么此时是可将其作为事故的外部征兆的[2]。利用传统的交通事故监测方法,如监测圈、监测树等,是能够达到较好的监测结果的,具有的性能也是较好的[3]。然而,由于此时对于交通事故的监测是通过探测波长实现的,故此,需要支付的成本是较高的[4]。基于卡尔曼集的交通事故监测算法,即便是当前所面临的征兆并不完全,具有的优势也是十分显著的[5]。
为了能够改善交通安全风险监测算法的性能,本研究提出了基于多道面状态传感器节点数据挖掘的交通安全风险监测算法。在该算法中将整个监测过程进行了过程划分,即事故预测、筛选以及监测三个阶段。
1 交通事故监测框架
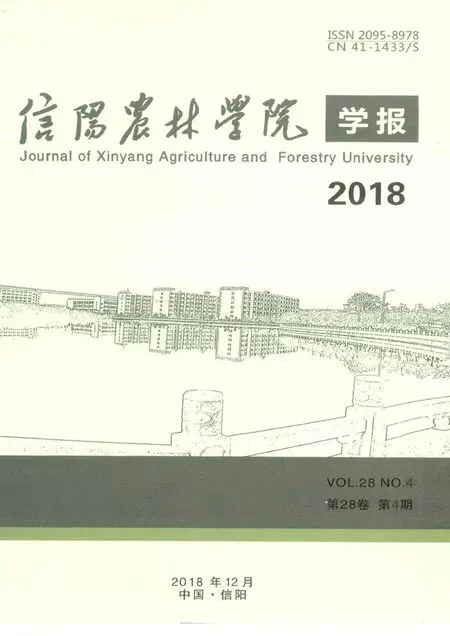
本交通安全监测系统算法的实现是通过三个模块进行的,即预测、筛选、以及监测。交通事故监测框架图如图1所示。
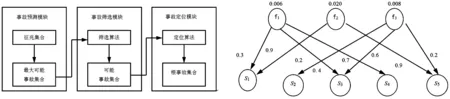
图1交通事故监测框架图图2概率加权的二分图(PWBG)
2 事故预测模块
本文在设计事故传播模型的时候,利用的是概率加权的二分图,利用该方法能够实现对事故的精确预测,具体模型如图2所示。
定义参数冗余度R(HMaX)指的是在最大事故集合中冗余事故数量在其中所占据的比重大小,可通过式(1)进行表达:
(1)
3 事故筛选模块
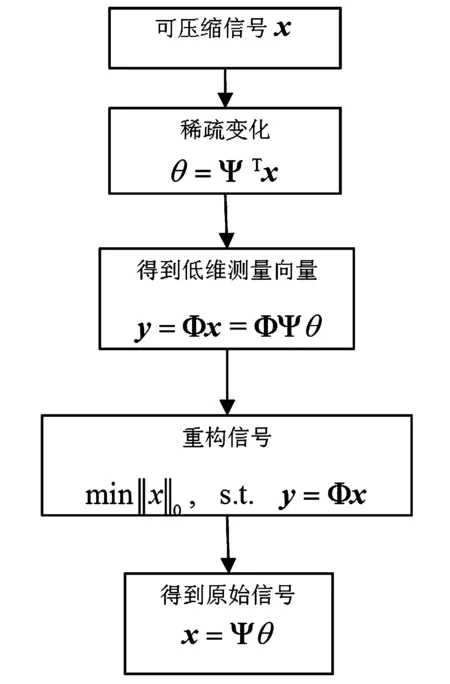
图3多道面状态传感器节点数据挖掘工作流程
3.1 多道面状态传感器节点数据挖掘理论
(1)信号的稀疏表示属于多道面状态传感器节点数据挖掘的重要先验条件,如式(2)所示:
x=Ψθ
(2)
(2)多道面状态传感器节点数据挖掘的观测模型进行投影,投影到与变换基不存在相关性的感知矩阵Φ,由此观测向量y能够从中得到,利用下式(3)能够得到观测向量:
y=Φx
(3)
根据式(2)和式(3)可知,观测向量和稀疏系数的关系可以表示为
y=Φx=ΦΨθ
(4)
(3)通过多道面状态传感器节点数据挖掘信号重构,主要是利用原来低于原始信号的稀疏度观测向量y来进行重构。如下式(5)所示
min‖x‖0,s.t. y=Φx
(5)
3.2 多道面状态传感器节点数据挖掘的事故筛选算法
通过预测模块获得的事故集合中,如图3所示表示了多道面状态传感器节点数据挖掘的基本工作原理与详细流程。
(1)第一步要求对信号具有的可压缩性进行验证,通过多道面状态传感器节点数据挖掘的方式对其进行处理是具有较强的合理性的。
(2)第二步,假设此时具有的信号强度阈值为αSI,要求高于阈值的原始信号部分能够保留。能够利用公式(6)得出αSI。
αSI=μ·Max{x1,x2,…,xn}
(6)
利用公式(7)能够得到对角矩阵元素值。
(7)
(3)第三步,利用得到的观测向量对原始信号值进行重构,η(HS)与R(HS)具体的计算公式如式(8)、式(9)所示。
(8)
(9)
4 交通事故监测模块
事故f具有的理想数据挖掘具体可通过下式(10)进行计算。
(10)
上式中,p(f|si)能够通过公式(11)计算得到。
(11)
H2(rf)可以通过公式(12)表示如下:
(12)
5 仿真及结果分析
图4代表了当采取的筛选尺度因子存在区别时,此时得到的事故集合具有的冗余度水平。
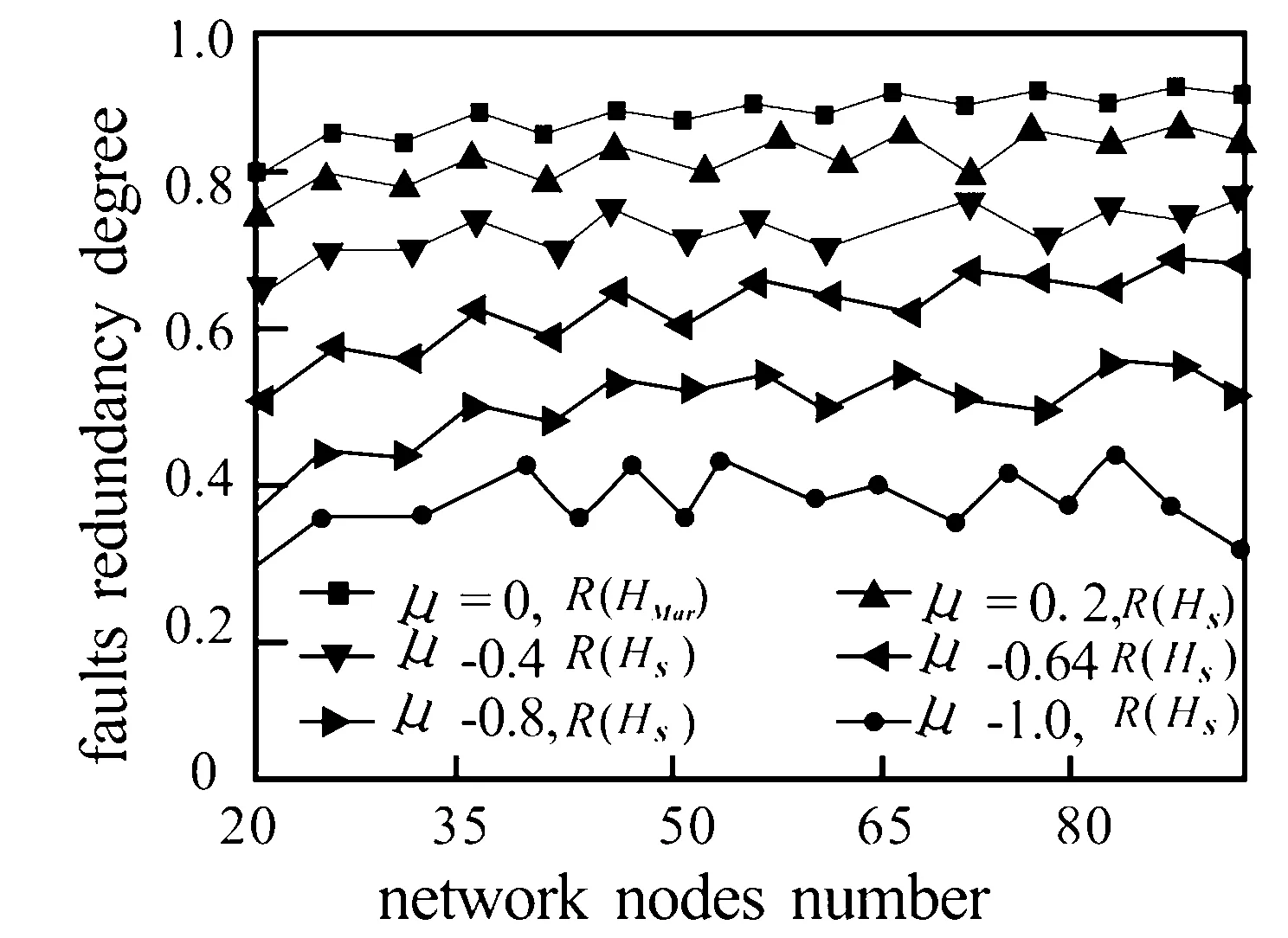
图4 不同尺度因子下的筛选后事故集合冗余度
表1反映了当事故集合经过筛选之后,得到的真实事故覆盖率水平η(HS)。分析表1能够得出,不管是在何种交通规模下,此时的η(HS)值是恒等于1的,也就是说此时的HS中真实事故能够得以有效保留。

表1 集合真实事故覆盖率
交通事故监测性能分析μ=1.0时,HS此时具有的冗余度水平最小,并且此时其中的真实事故也能够得到有效的保持,故此,本文基于μ=1.0的前提下,实现了事故的筛选与监测,以获得最终的监测结果。
如图5所示,分析可得,此时的本文算法在检测率上是表现为更高的检测率的,BSD次之,MCA具有最低的检测率。
图6表示了在不同的交通中,三种算法所表示的事故检测率方差水平,方差水平能够对事故监测的稳定性进行分析。整体而言,本文算法是具有更强的稳定性的,在不同的交通中表现出了较高的事故检测稳定性。对比而言,MCA算法具有较低的稳定性。
图5事故检测率图6事故检测率方差
6 结论
本文提出了一种基于多道面状态传感器节点数据挖掘的交通安全风险监测算法。该算法通过预测模块的卡尔曼集,从中快速得到了预测结果,利用参数事故覆盖范围,实现了事故向信号的有效转化。最后,再通过对多道面状态传感器节点数据挖掘参数的设定,实现了对事故的有效判别,仿真结果表明:在不同的随机交通中,该算法的事故检测率都是十分良好的,而且此时的事故误检率也是相对较低的。
猜你喜欢
交通科技与管理(2022年16期)2022-08-27 04:21:10
科技创新与应用(2022年14期)2022-06-02 15:14:32
大众投资指南(2021年35期)2021-02-16 01:06:26
公民与法治(2020年17期)2020-10-27 02:27:52
小雪花·成长指南(2020年2期)2020-10-12 02:39:11
电力与能源(2017年6期)2017-05-14 06:19:37
北京航空航天大学学报(2017年12期)2017-04-23 08:31:41
灾害医学与救援(电子版)(2016年4期)2016-03-11 20:18:15
信息通信技术(2015年6期)2015-12-26 01:16:46
电子设计工程(2014年18期)2014-02-27 12:00:13