基于PID控制的汽车定速巡航系统设计与试验
2018-12-14 01:30方亮汪志贤黄伟陈瑶
汽车实用技术 2018年21期
方亮,汪志贤,黄伟,陈瑶
基于PID控制的汽车定速巡航系统设计与试验
方亮1,汪志贤2,黄伟1,陈瑶1
(1.江淮汽车集团股份有限公司,安徽 合肥 230601;2.安庆安簧汽车零部件有限公司,安徽 安庆 246131)
基于某搭载定速巡航系统的在研车辆,对巡航控制系统的结构及功能进行了梳理,通过对PID控制器的原理分析,建立了巡航系统的控制器算法,确定了控制器的关键参数。经过实车道路标定与试验,结果表明,该系统具有较好的精度,响应速度快,系统工作稳定,能够满足汽车巡航系统实际使用要求。
汽车;巡航控制系统;PID控制;标定
概述
巡航控制系统的核心在于控制算法,目前国内外已经进行了大量的研究,如滑模控制方法,模糊控制算法,粒子群等控制算法[2-4]。但由于PID控制算法所具有的结构简单、稳定性好、可靠性高以及操作方便等优点,可成熟的运用于实车当中。本文主要介绍了一种PID控制算法在某车型中的实际运用。
1 巡航控制系统结构
巡航控制系统如下图1所示,由巡航控制系统与驾驶员的人机交互界面、巡航模式控制子系统和巡航车速控制子系统统组成。
人机交互界面包括巡航开关输入、巡航状态的仪表显示、巡航取消信号(刹车,离合等),主要负责驾驶员与巡航控制系统之间的人机信息交互输入与显示。
巡航功能控制子系统接受巡航人机交互界面子系统驾驶员各种操作,决定当前采用哪种巡航控制模式。
巡航速度控制子系统通过当前发动机的状态,巡航系统请求状态等计算当前需要发动机发出的扭矩,通过扭矩控制模块计算电子节气门的开度进而控制车辆速度。
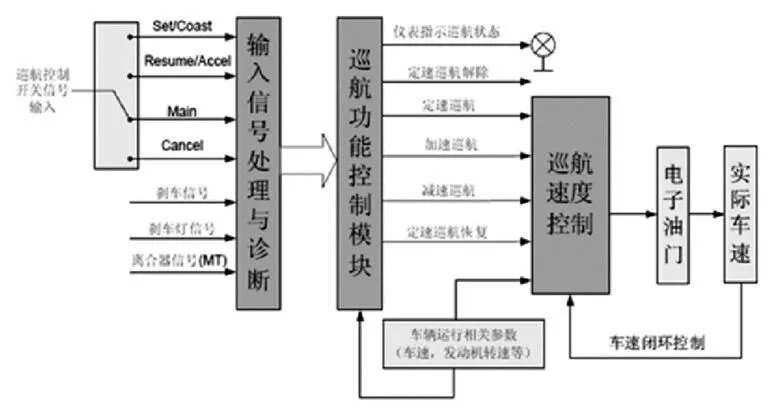
图1 巡航控制系统结构
2 巡航控制系统功能
巡航控制系统需要按照驾驶员的意图自动控制车辆的速度,驾驶员只要通过对巡航开关的操作就能够实现下列功能。
定速巡航:将巡航主开关(ON/OFF)拨到ON位置后,即可以在设定的速度上短按(Set/-)键进入巡航状态,即实现不睬油门车辆巡航行驶。
为生活忙碌着,没有人会因为畏惧严寒而停下脚步。用心走好脚下的路,即便是在风寒冰冷处,也依然能找到属于自己的风景。
加速巡航:在定速巡航下短按(Resume/+)键,可以增加时速1km;在定速巡航状态下,持续按住(Resume/+)键,车速会自动缓慢提升,直至适合的速度再松开按键。
减速巡航:在定速巡航下短按(Set/-)键,可以降低时速1km;在定速巡航状态下,持续按住(Set/-)键,车速会自动缓慢下降,直至适合的速度再松开按键。
巡航解除:在巡航状态下,轻轻踩制动踏板,便可解除定速巡航;在巡航状态下,按下CANCEL键,便可以解除定速巡航;
巡航恢复:在解除巡航后,只要短按(Resume)键,不用踩油门,车速即可以自动恢复到定速解除之前的巡航速度。在定速巡航状态下,直接踩油门加速,当松开油门后,车速将缓缓恢复到先前设定的巡航车速。
3 PID控制器设计[5]
在汽车巡航控制系统中,PID控制器与被控对象共同组成系统的闭环。PID控制器设计的好坏直接影响到控制效果。
3.1 PID控制基本原理
在PID控制中,该控制器根据驾驶人设定的速度(巡航速度)与汽车实际行驶速度的差值,控制器的比例控制根据这个偏差的大小输出相应的控制量来控制发动机节气门开度,减少偏差,从而使得行驶车速趋近设定车速值。控制器的积分控制把车速偏差累计起来,通过加大控制量来减小车速偏差,使行驶车速能够保持在恒定稳定的工作状态。控制器的微分控制体现了车速偏差的变化趋势,能够在车速偏差变化剧烈之前,通过一个早期的修正信号进行修正,以减小系统的超调和震荡,使得系统的响应速度提高,调整时间减小,保证系统的控制性能[6]。
PID控制器的原理图如图2所示:
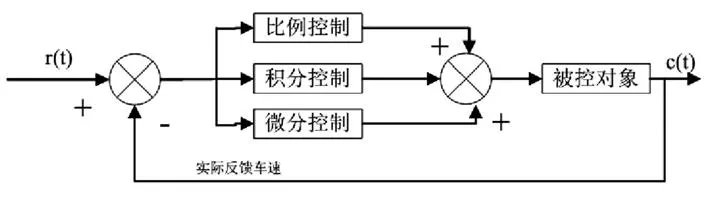
图2 PID控制器原理图
3.2 PID控制算法设计
设系统给定值为r(t),实际输出值为c(t)。则误差e(t)=r(t) -c(t),通过PID系统调节后的输出值u(t)为:

写成传递函数为:

其中:Kp——比例系数,Ki——积分时间常数,Kd——微分时间常数
离散化处理:一系列的采样时刻点kT代表连续时间t,以加和代替积分,以增量代替微分,变换得:
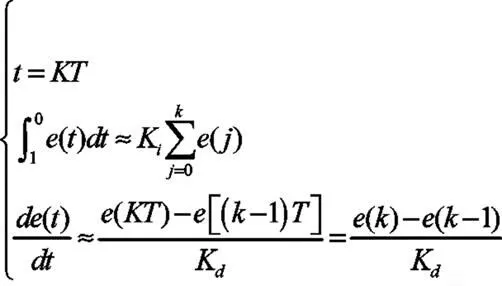
将(3)带到(1)中,得到离散的PID表达式为:

被控对象所用到的是控制量的增量,则要导出提供增量的PID控制算式,推导得:

推出增量():
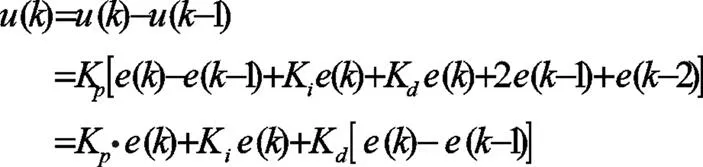
比例系数Kp,积分时间常数Ki,微分时间常数Kd,一旦确定这三个系数就可以得到控制增量。
4 巡航控制系统在某车型上的验证
将本文设计的控制器模型导入某车型的发动机控制单元中,通过反复标定与试验,确定最终了控制器的关键控制参数。
4.1 某车型整车参数
某6档手动车型整车基本参数如下:
表1 某车型整车参数

4.2 转毂巡航验证
根据整车整备质量,通过查表法对转毂进行加载,考察车辆在平直路面以及具有一定坡度路面(3%坡度)的巡航控制精度,主要分为加速巡航能力,减速巡航能力,以及在不同车速下的定速巡航能力。试验验证结果如图3~7所示。
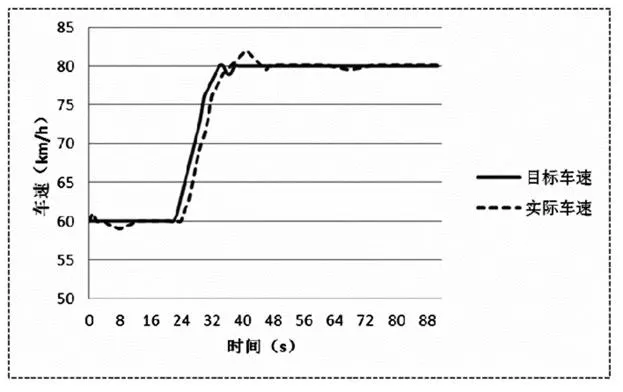
图3 平直道路,加速巡航
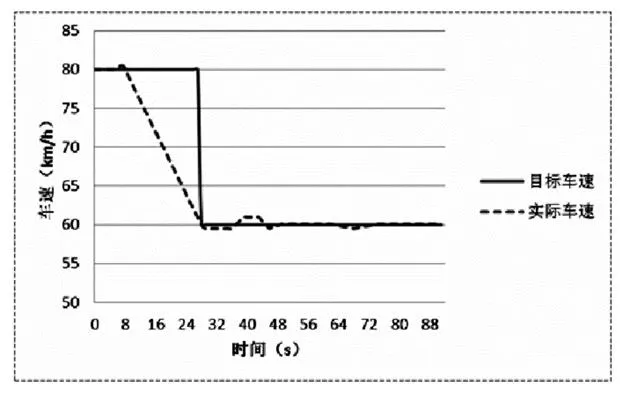
图4 平直道路,减速巡航
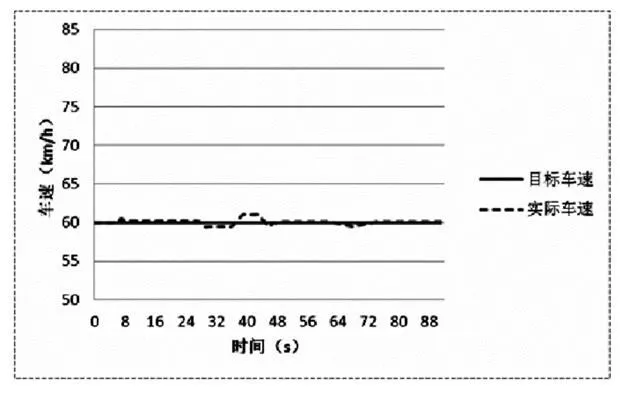
图5 平直道路,巡航车速60km/h
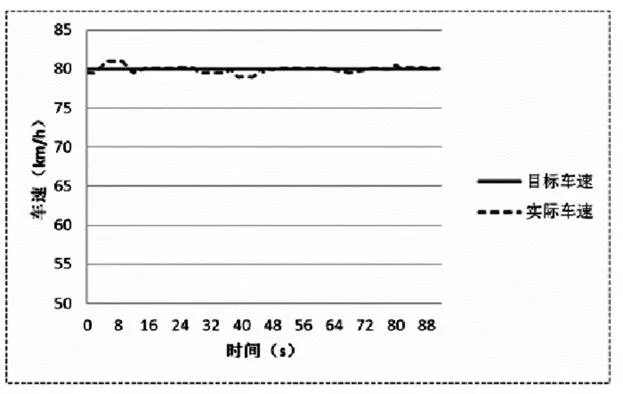
图6 平直道路,巡航车速80km/h
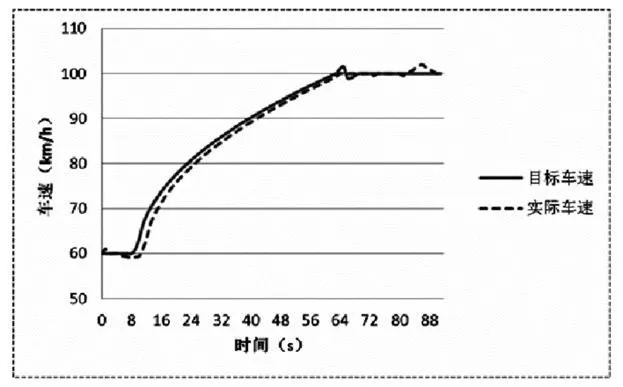
图7 3%坡道加速巡航以及100km/h定速巡航
通过实车验证可以看出,车辆在平直以及具有一定坡度路面(3%坡度)的路面上,加速巡航以及减速巡航,实际车速能够紧随目标车速上升或下降;在不同的定速巡航车速下,实际车速与目标车速差值可控制在±2km/h以内,巡航控制精度较高,能够较好的满足车辆的巡航控制要求。
5 总结
本文探究了增量式PID控制算法引入实车运用的可行性。根据PID控制的基本原理,对PID控制算法进行设计,经离散化处理最终得到PID控制量的增量算法,并建立模型,运用于某车型当中。通过在平直路面以及坡道路面测试某车型的加速巡航、减速巡航,以及在不同车速下的定速巡航的控制精度,结果表明:增量式PID控制算法操作简便,控制精度较高,稳定性好,能够满足车辆的使用要求。
[1] 刘欣,孙永强等.汽车用定速巡航系统[J].重型汽车.2004(04).
[2] 朱丽丽,赵秀春.汽车自动巡航系统的PID控制[J].科技信息. 2009(34).
[3] 高振海,吴涛等.基于粒子群算法的汽车自适应巡航控制器设计[J].农业机械学报.2013(12).
[4] 仇成群,刘成林,沈法华等.基于Matlab和模糊PID的汽车巡航控制系统设计[J].农业工程学报.2012(6).
[5] 韩科立,朱忠祥,毛恩荣,等.基于自动机械式变速的拖拉机定速巡航系统[J].农业工程学报.2012(4).
Design and test of automobile cruise control system based on PID control
Fang Liang1, Wang Zhixian2, Huang Wei1, Chen Yao1
(1.Jiang-Huai Automobile Group CO., LTD., Anhui Hefei 230601;2.An Qing Spring Automobile Part CO. LTD., Anhui Anqing 246131)
Based on the automobile with cruise control system, the paper analyzes the structure and functions of cruise control system, through the analysis of the principle of PID controller, a controller algorithm for cruise control system are established, and the key parameters of the controller are confirmed later. After calibration and real road test on vehicle, the results show that the system has better control accuracy and fast response speed, works stably and can satisfy the actual use needs of automobile cruise control system.
Automobile; Cruise Control System; PID Control; Calibration
U462
B
1671-7988(2018)21-136-03
U462
B
1671-7988(2018)21-136-03
方亮,就职于江淮汽车集团股份有限公司。
10.16638/j.cnki.1671-7988.2018.21.047
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
当代陕西(2022年6期)2022-04-19
当代水产(2021年8期)2021-11-04
佳木斯大学学报(自然科学版)(2021年3期)2021-07-05
湖北工业大学学报(2021年2期)2021-04-28
汽车维修与保养(2019年1期)2019-05-05
妇女生活(2019年1期)2019-01-17
汽车电器(2018年12期)2019-01-04
中国测试(2018年9期)2018-05-14
汽车维护与修理(2018年1期)2018-04-04