四轮独驱电动汽车驾驶模拟器仿真平台研究
2018-12-14 01:30南丁李刚杨志高青云
汽车实用技术 2018年21期
南丁,李刚,杨志,高青云
四轮独驱电动汽车驾驶模拟器仿真平台研究
南丁,李刚,杨志,高青云
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001)
针对四轮独立驱动电动汽车控制算法开发与验证,论文基于驾驶模拟器建立了四轮独立驱动电动汽车仿真平台。应用车辆动力学仿真软件CarSim RT和科学计算软件 MATLAB/Simulink建立四轮独立驱动电动汽车仿真模型,结合驾驶模拟器试验台软硬件搭建仿真平台。设计直线加速实验和双移线实验工况对仿真平台进行了功能性验证。验证结果表明:仿真平台可进行四轮独立驱动电动汽车控制算法的仿真实验验证。
四轮独立驱动;驾驶模拟器;仿真平台
前言
面对环境污染所造成的压力和能源消耗量的巨大需求,电动汽车已无可争议地成为21世纪汽车工业发展的主流研究方向[1-3]。对于电动汽车新技术的研究一直在进行,其中四轮独立驱动电动汽车已成为国内外研究的焦点。电动汽车技术开发按照V字型开发流程,过程包括软件仿真、硬件在环试验和实车验证。通过仿真手段对电动汽车控制算法开发进行定性分析可缩短开发周期、减少开发费用、提高开发效率。在仿真验证方面,多数采用软件仿真手段,即应用车辆动力学商用化软件或者应用编程软件进行建模或者应用联合仿真手段进行电动汽车控制算法仿真实验与分析[4-7]。论文基于驾驶模拟器软硬件平台,应用车辆动力学仿真软件CarSim RT和科学计算软件 MATLAB/Simulink,建立了四轮独立驱动电动汽车仿真平台,并通过典型工况对仿真平台进行了功能验证。
1 驾驶模拟器试验台
汽车驾驶模拟器试验台是通过改造实车,应用真实的驾驶舱为驾驶员提供真实的操纵环境,并通过环屏投影的方式为驾驶员提供仿真动画,如图1所示。驾驶员的操纵信号包括:加速/制动踏板位移传感器、踏板力传感器、方向盘转角传感器、档位传感器等,实时仿真系统dSPACE通过采集这些信号并结合车辆基本参数对车辆行驶状态进行控制,实时地反应当前行驶状态给CarSim RT软件,CarSim RT软件通过环绕音效、LED屏幕或投影的方式为驾驶员提供逼真的仿真动画。同时,路感模拟系统根据车辆方向盘转角和车速计算出方向盘的回正力矩并把电信号输入给方向盘力感模拟电机,给驾驶员提供路感反馈[8]。驾驶模拟器试验台的硬件组成部分包括:驾驶模拟器、主控上位机、DS1006控制器、音响、环屏投影。软件组成部分包括:实时动力学仿真软件CarSim RT、实时仿真系统dSPACE、MATLAB/Simulink建模软件。

图1 驾驶模拟器与环屏投影
2 四轮独立驱动电动汽车仿真模型搭建
应用CarSim RT软件搭建整车模型和道路模型。CarSim RT软件是一个专门针对车辆动力学仿真的软件。软件基于窗口链接式、参数化设计,自身拥有SimSolver计算工具和SurfAnim仿真动画播放器。模型库中自带许多A级至F级车的参数化的整车模型,整车模型包括:整车基本参数、传动系统参数、转向系统参数、制动系统参数、悬架系统K&C特性以及轮胎模型参数。

图2 整车模型
驾驶模拟器上装有传感器,传感器输出的实时状态变量输入给dSPACE1006 控制器。如图2中左半部分为RTI 数据端口模块,经过标定把采集的模拟信号转换成程序运行的数字信号,如方向盘转角、四轮转角、四轮驱动力等信号,输入到 CarSim RT软件中,应用自身的车辆状态计算工具SimSolver计算出车辆在模拟环境中的位置、行驶状态以及各个方向上所受的力和力矩等参数。图中右半部分为CarSim RT软件输出端口模块,实时输出车辆状态信息,如车速、质心侧偏角、横摆角速度、四轮转速等共有500余项参数可供选择,这些参数将重新运用于控制策略的搭建、算法的优化以及在线仿真实验验证。
整车控制模型中非常重要的一部分是四轮独立驱动电机模块,如图3所示。通过Lookup Table建立驱动电机Map图,根据四个车轮当前转速,确定最大输出驱动力矩。
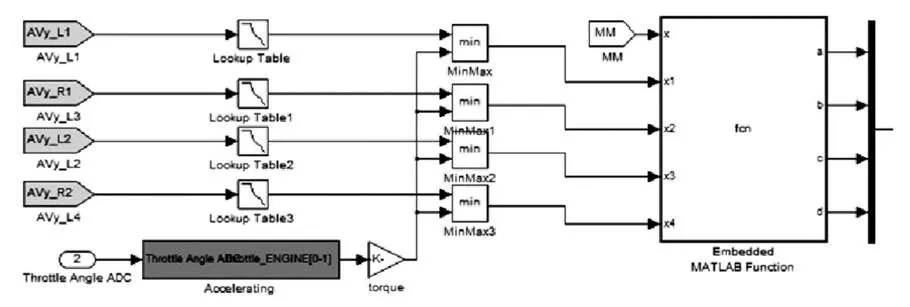
图3 四轮电机模块
Embedded MATLAB Function是驱动力矩控制分配模块:根据理想横摆角速度和实际横摆角速度的误差计算保持车辆稳定所需的横摆力矩,通过编写算法合理分配四轮驱动力矩,从而实现通过驱动横摆力矩控制提高四轮独立电动汽车操纵稳定性的目的。该部分模块是开放性的,为开发者建立合理分配四个车轮驱动力矩的控制算法提供接口。
3 驾驶模拟器仿真平台实验验证
3.1 直线加速工况
仿真工况设置:1200m直线路面,地面附着系数为0.85,驾驶员在实验台上进行急加速实验,实验场景如图4所示。实验结果如图 5 所示。

图4 直线加速实验场景

3.2 双移线实验工况

图6 双移线实验场景

(a) 车速 (b) 方向盘转角
(c) 横摆角速度 (d) 四轮驱动力矩
图7 双移线实验结果
仿真工况设置:200m双移线路面,地面附着系数为0.85,初始车速为70km/h,驾驶员将车速稳定在70km/h左右,采用等驱动力矩控制。实验场景如图6所示。实验结果如图7所示。
语文教育是任何学科教育的基础,它在学生素质培养中有不可估量的作用。语文课是工具性和人文性的统一,它的作用也可以从这两个方面得到体现。
7、液压制动机车制动失效。要认真检查制动总泵和分泵,是否按时更换刹车油,彻底排除制动管路的空气,并要查看刹车踏板是否符合科学高度。气压制动的机车要检查调整最大制动工作气压,检查制动皮碗及软管是否发生异常变化。
4 结论
根据四轮独立驱动电动汽车的特点,应用车辆动力学仿真软件CarSim RT和MATLAB/Simulink,基于驾驶模拟器搭建了四轮独立驱动电动汽车仿真平台。通过直线加速实验和双移线实验两种典型实验工况,验证了该平台能为四轮独立驱动电动汽车的控制算法开发奠定良好研究基础。
参考文献
[1] 张多,刘国海,赵文祥等.电动汽车多电机独立驱动技术研究综述 [J].汽车技术,2015,(10):1-6.
[2] EHSANI M, CAO Y, EMADI A. Modern Electric, hybrid electric, and fuel cell vehicles: fundamentals, theory, and design [M]. U. S. CRC Press, 2010, 13.
[3] 李刚,宗长富.四轮独立驱动轮毂电机电动汽车研究综述[J].辽宁工业大学学报(自然科学版). 2014,34(01):47-52.
[4] 李刚,李宁,段敏等.基于Simulink的四轮轮毂电机电动汽车仿真模型开发[J].辽宁工业大学学报(自然科学版).2012,32(03):185- 189.
[5] 王明玉.分布式驱动电动车直接横摆力矩控制研究[D].哈尔滨工业大学,2016.
[6] KIM B, KIM Y, KIM T, et al. HEV Cruise Control Strategy on GPS (Navigation) Information [J]. World Electric Vehicle Journal, 2009, 3(1): 1843-1850.
[7] 孙跃东,郭森,周萍. ESP系统的CarSim与Simulink联合仿真研究 [J].机械设计与制造. 2018,3(03):16-22.
[8] 雷永强.四轮独立转向/独立驱动电驱动汽车四轮转向与横摆力矩集成控制研究[D].辽宁工业大学硕士学位论文,2017.
Research on Four-wheel Independent Drive Electric Vehicle Simulation PlatformBasedon Driving Simulator
Nan Ding, Li Gang, Yang Zhi, Gao Qingyun
( College of Automobile and Traffic Engineering, Liaoning University of Technology, Liaoning Jinzhou 121001 )
Abstract:In order to develop and verify the control algorithm of four-wheel independently drive electric vehicle, a simulation platform of four-wheel independently drive electric vehicle is established, based on driving simulator. CarSim RT and MATLAB / Simulink are used to establish the simulation model of four-wheel independently drive electric vehicle, and the simulation platform is built by the software and hardware of driving simulator test bench. The linear acceleration experiment and the double shift experiment are applied to verify the simulation platform. The simulation results showed that simulation platform can be used for validation of four wheel independent drive electric vehicle control algorithm simulation experiments.
Keywords: Four-wheel independent drive; Driver simulator; Simulation platform
CLC NO.: U469.72
Document Code: B
Article ID:1671-7988(2018)21-13-03
中图分类号:U469.72
文献标识码:B
文章编号:1671-7988(2018)21-13-03
作者简介:南丁,就读于辽宁工业大学汽车与交通工程学院。
10.16638/j.cnki.1671-7988.2018.21.005
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
小哥白尼(趣味科学)(2021年6期)2021-11-02
新视线·建筑与电力(2021年2期)2021-09-10
佳木斯大学学报(自然科学版)(2021年3期)2021-07-05
故事作文·高年级(2021年4期)2021-05-06
湖北工业大学学报(2021年2期)2021-04-28
小哥白尼(神奇星球)(2021年11期)2021-03-08
汽车实用技术(2018年22期)2018-12-08
中国测试(2018年9期)2018-05-14
山东青年(2016年12期)2017-03-02