基于混合频率激励的新型公共电极式电容触觉传感阵列设计*
2018-12-10 08:55余建平卢科青
传感技术学报 2018年11期
李 欣,余建平*,卢科青
(1.衢州学院浙江省空气动力装备技术重点实验室,浙江 衢州 324000;2.杭州电子科技大学机械工程学院,杭州 310018)
As medical device and robot technology evolves,artificial skins integrated with tactile sensors are widely applied on artificial arms for human fundamental self-care capability reconstruction. Realizing tri-axial sensing capability is the first step of rebuilding human sensing function of artificial arms. For actual artificial arm deployments,tactile sensors are also desired to own characteristics such as flexibility,compliance,robustness,and potential for large area applications.
Within the past decades,micro machining techniques have been wildly applied to realize tactile sensor arrays on silicon substrates[1-6]. However,for artificial arm applications,silicon-based devices are too fragile to sustain reduplicative and large deformation. Therefore,polymer-based materials,such as polyester,parylene,polyimide(PI)or polydimethlysiloxane(PDMS),were proposed to replace silicon for flexible substrates manufacturing. Resistive and capacitive sensors are two major types of sensor structures for tactile sensing arrays[7-10]. The sensor arrays employing resistive sensing elements provide good sensitivity and reliable response. However,those devices have some common drawbacks such as low repeatability,high power consumption and high temperature dependence.Tactile sensing arrays can also be patterned in capacitor mechanisms. Although capacitive sensing arrays may suffer from external noise,capacitive approach still owns some intrinsic advantages,such as fast response,insensitivity to temperature variation and high repeatability[11-14].
Among those sensing apparatuses,more than one signals need to be detected in each unit sensing element in order to realized multiple dimensional force sensing,and in most ways,it is usually accomplished by combining several sensing elements in a unit sensing element,which leads to a common open issue that despite their high resolution,multiple dimensional force sensing,etc.,complex mechanisms always result in unpredictable coupling errors. Therefore,sensor devices of multiple dimensional force sensing capability with simple structures and low-cost are demanded in actual human sensing function reconstruction.
In this work,we propose a three-dimensional tactile sensor with common electrode based on hybrid frequency excitation. Some improvements are concluded as the followings:①a typical eight-sensing electrode structure is simplified to a four-sensing electrode mechanism in a unit sensing element to achieve three-dimensional pressure sensing;②all fragile interconnects are patterned on the bottom FPCB-based layer,While the top layer is patterned on PDMS-based structures with only a common electrode,since sensing electrode layer has much less deformation than the common electrode layer,this approach owns relatively better robustness under large substrate deformation compared to conventional mechanisms;③hybrid-frequency excitation is introduced to detect the capacitive changes of four sub-units simultaneously.
1 Sensor Mechanism
As shown in Fig.1,flexible capacitive tactile sensing array consists of four layers,including a sensing electrode layer,an insulation layer,a common electrode layer and a surface layer. Both the row and column interconnects are located on the bottom layer,which in this design can easily be realized by using commercially available FPCB technologies. FPCB technologies have been widely used in industries and proved to be quite robust and manufacturable. While the common electrode layer is patterned on polydimethlysiloxane(PDMS)based structures. Sensing electrode layer of every unit sensing element is patterned with four symmetrical sensing electrode,named asS1,S2,S3andS4,the four of them are arranged in a square form.
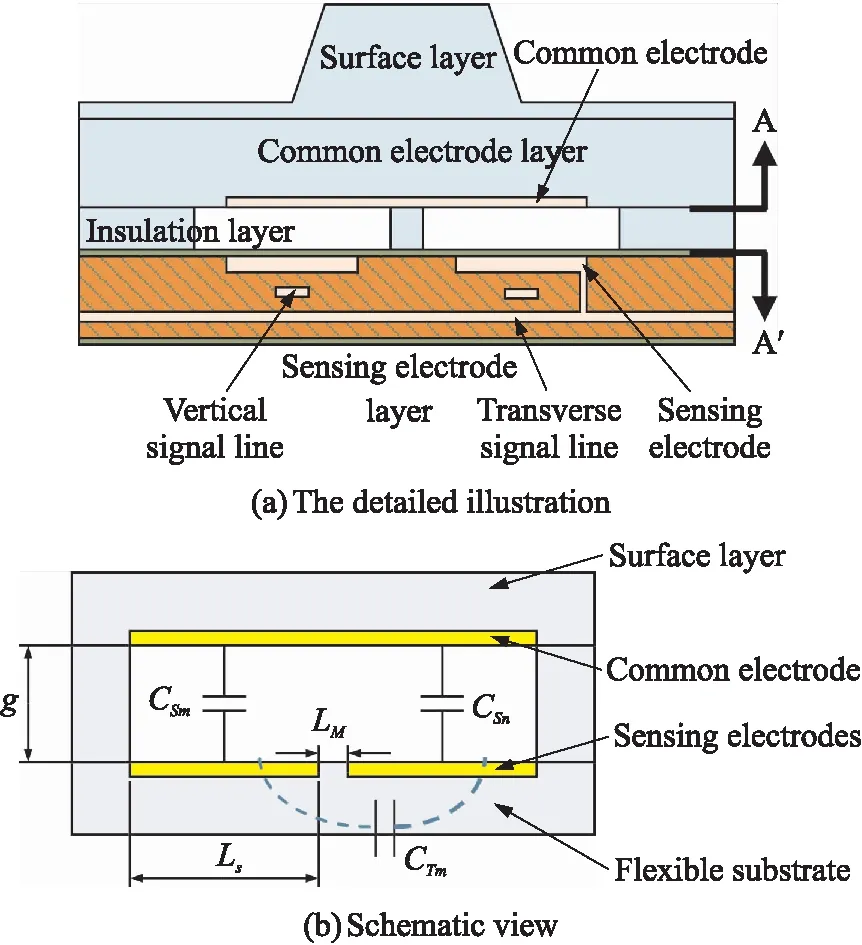
Fig.1 Conceptual diagram of a unit sensing element of the proposed tri-axial capacitive tactile sensing array
Interconnects for signal sampling are also patterned on sensing electrode layer. The common electrode layer has a common electrode right in the middle,as shown in Fig.2.
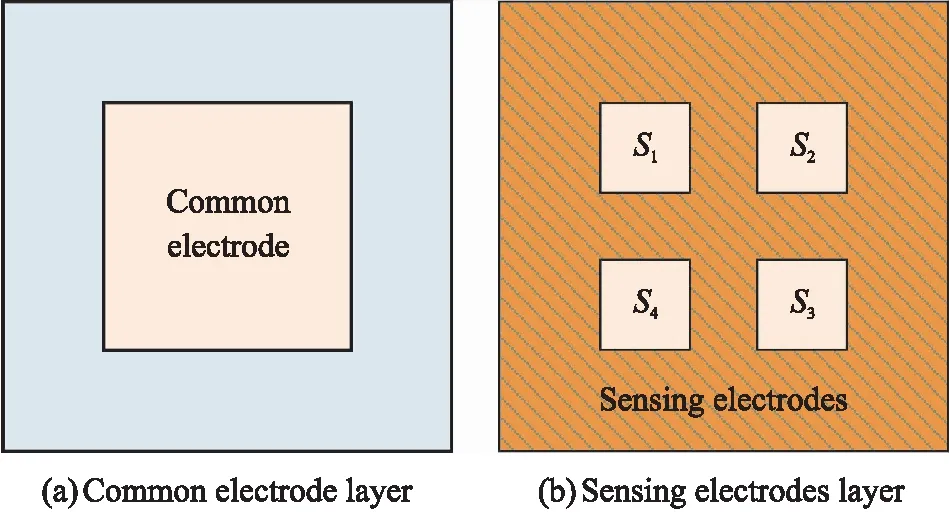
Fig.2 Layout of a unit sensing element
Four sensing electrodes and the common electrode consist four capacitive sensing sub-units,the capacitances are defined asCS1,CS2,CS3andCS4. The bump on the surface is designed to enhance the sensitivity of differential capacitance changes when shear force is applied.
2 Measuring Operation
Of each unit sensing element,four sensing electrodes and a common electrode constitute four capacitors in a unit sensing element,The capacitance of the four sub-units can be expressed as:
(1)
If capacitance measured between the two sensing electrodesS1andS2is defined asCT1,that betweenS2andS3,S3andS4,S4andS1are defined asCT2,CT3,CT4,respectively,then,the relationships between them can be calculated approximated as:
(2)
whereCTmrepresents the capacitance between two sensing electrodes.
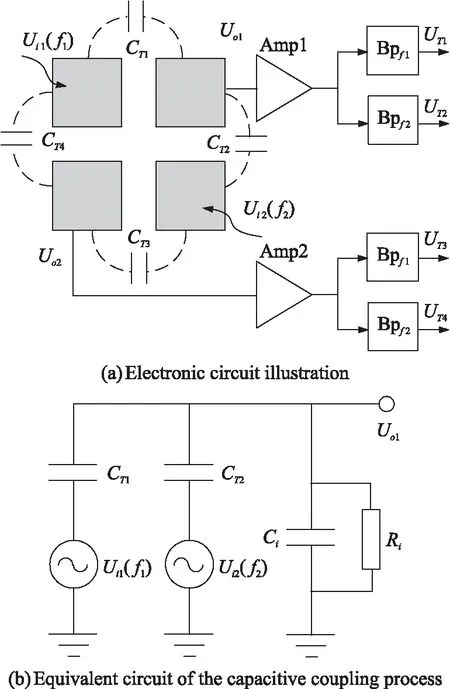
Fig.3 Capacitances detection scheme
For each sensing element,four sets of capacitive signals should be detected simultaneously from four sensing electrodes,which can not be realized based on mono-frequency excitation. Therefore,as in Fig.3(a),a hybrid-frequency excitation scheme for the four quadrant electrodes is demonstrated,in which AC voltage sourcesUi1andUi2are introduced with different frequenciesf1andf2. Output signals fromS2andS4are firstly buffered by a high input-impedance amplifier Amp1 and Amp2. Then the harmonic components are extracted by band-pass filters,respectively.
Fig.3(b)illustrates half of the equivalent circuit of the capacitive coupling process,in which Ri stands for the input resistance of Amp1,Cistands for its input capacitance. Given time functions ofUi1andUi2as:
(3)
The harmonic component UT1can be solved in vector form as:
(4)
whereCsum1means the sum ofCT1andCi,ka indicates the gain of Amp1,andkf1stand for the attenuation of Bp1,respectively.UT2,UT3,UT4can be deduced in the similar way.considering the high input impedance of amplifier and the common excitation frequency for capacitive transducer,deduced capacitances can be simplified as:
(5)
From eq.(2)and(5),capacitance of the four sub-units can be easily decoupled. As be known,During the measuring,When a normal forceFzofz-axis is applied on the surface layer,the gap distance of four sub-units has a same variation defined asgz. When a shear forceFxofx-axis is loaded,the gap distance ofCS2andCS3decrease with a same variation asgx,while,that ofCS1andCS4increasegx. When a shear forceFyofy-axis is loaded,the gap distance ofCS1andCS2decrease with a same variation asgy,while,that ofCS3andCS4increasegy. Therefore,when the normal and shear forces are applied on the unit sensing elements,in can be concluded that:
(6)
As long as gap variations of four sensing electrodes in a unit sensing element are calculated from the derived capacitances of eq.(6),the measured contact force will be easily decomposed into its normal and shear components synchronous detection and separation of multi-dimensional tactile information are realized.
Fx=KxgxFy=KygyFz=Kzgz
(7)
whereKx,Ky,Kzare considered as the spring constants of a unit sensing element inx-y-zaxes.
3 Sensing Behavior Analysis
Since this flexible capacitive tactile sensing array consists of numbers of unanimous unit sensing elements,the COMSOL model takes advantage of the symmetry in the geometry and models only a unit sensing element of the device. In this design,considering the surface layer is required to have distinguished stress concentration,the insulation layer and common electrode layer should be more flexible than the surface layer,therefore,different types of PDMS are applied in separated layers. The specific material attributions are listed in Table 1.

Table 1 The specific material attributions
In the analysis,firstly,Fig.4 plots the potential distributions of four sub-units in this unit sensing element when only a shear force inx-axisFx=25 mN is loaded on the surface layer,which,can be told are quite different from each other. When the differences are properly detected,capacitance variations can be easily acquired. In order to validate the capability of this flexible capacitive tactile sensing array to measure normal and shear forces,of the following analysis,Fx,FyandFzare defined as variables.

Fig.4 Potential distributions of four sub-units(V)
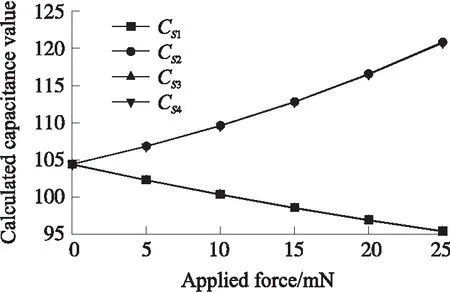
Fig.5 The relationships of capacitance variations ofsub-units to loaded force Fx
Fig.5 plots the relationships of capacitance variations of four sub-units to the loaded force,whereFxis defined changeable,whileFyandFzare fixed zero.
Gap variations in Table 2 are calculated from the measured capacitances depicted in Eq.(6). Consider that the original gap distance is defined as 15 μm,the sensitivity of a unit sensor is about 0.43%/mN forx-axis. which,as expected,has unanimous results with model based fitting in Sec. 2.
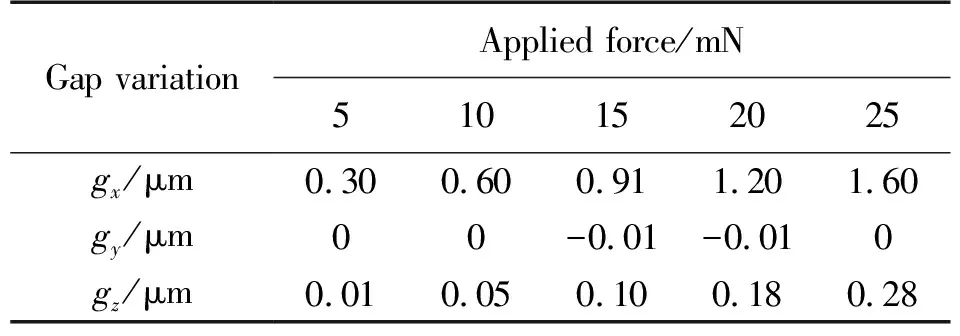
Table 2 Equivalent gap variation induced bythe normal and shear forces
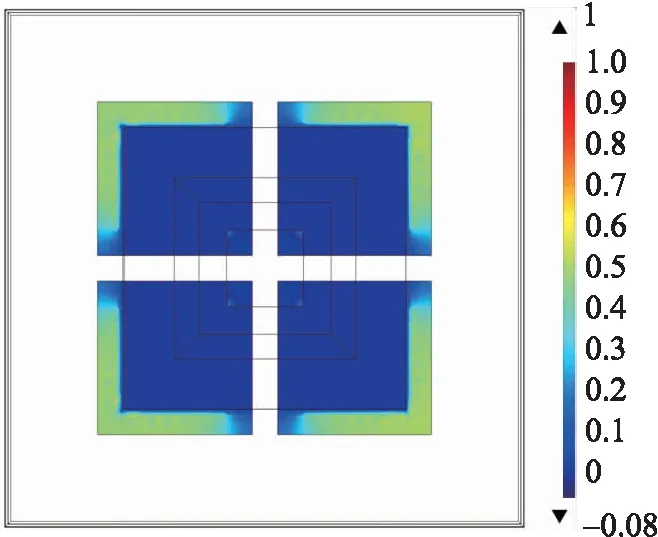
Fig.6 Potential distributions of four sub-units(V)
Fig.6 plots the potential distributions of four sub-units in this unit sensing element when a normal force inz-axisFz=25 mN is loaded on the surface layer,which as expected,are completely same from each other. Fig.7 is the illustration of the relationships of capacitance variations of four sub-units to the loaded force,whereFzis defined changeable,whileFyandFxare fixed zero. As can be identified that four sub-unit share a same capacitance variation.
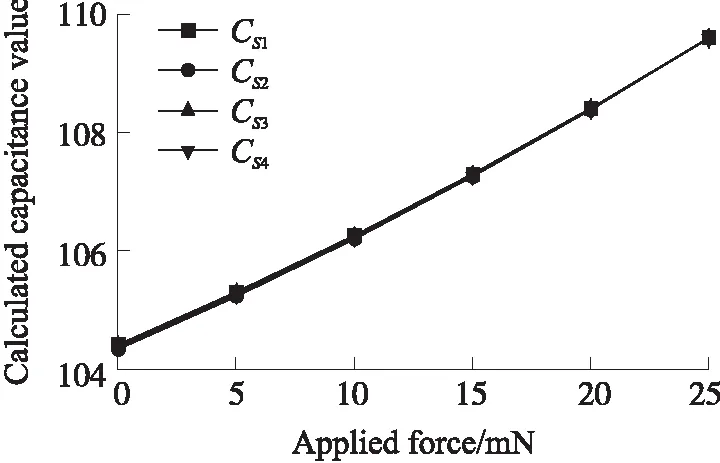
Fig.7 The relationships of capacitance variations of sub-units to loaded force Fz
Based on the calculated gap variations in Table 3,estimated sensitivity of a unit sensor with this setup is 0.17%/mN forz-axes.
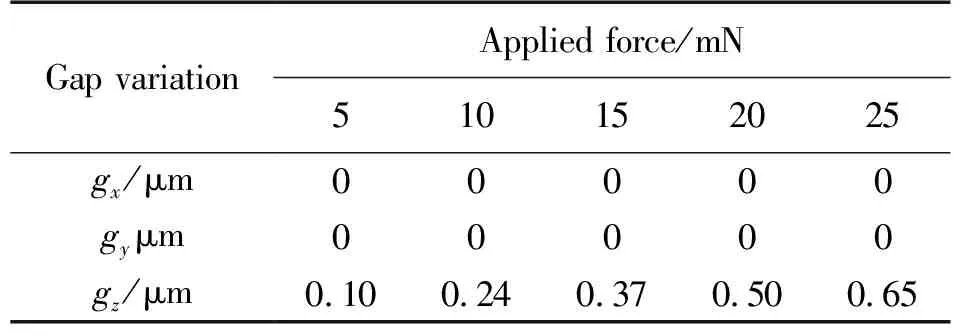
Table 3 Equivalent gap variation induced bythe normal and shear forces
4 Summary
The development of novel flexible capacitive tactile sensing array is presented in this work. The proposed sensing array mainly consists of a micromachined PDMS structure and a FPCB structure,which effectively reduce the complexity of device structure and thus makes the device highly manufacturable. Capacitances of four sub-units of every unit sensing element of this sensing array are detected simultaneously based on hybrid frequency excitation. The force model is established in theory and simulated by COMSOL Multiphysics software. The estimated sensitivities of a unit sensor are 0.43 and 0.17%/mN for thex-yandz-axes,respectively
猜你喜欢
仪器仪表用户(2022年10期)2022-09-29
仪器仪表用户(2022年4期)2022-04-01
文化交流(2019年10期)2019-11-22
家庭影院技术(2019年7期)2019-08-27
家庭影院技术(2019年7期)2019-08-27
中国环境监察(2017年5期)2017-10-23
中国公路(2017年6期)2017-07-25
中国公路(2017年8期)2017-07-21
教师·下(2009年11期)2009-12-25
文史天地(2009年11期)2009-12-09