
电动智能车试验平台控制策略设计及性能仿真
2018-12-08 06:58张明杰王丰元刘立强邹旭东周冬生
汽车实用技术 2018年22期
张明杰,王丰元,刘立强,邹旭东,周冬生
电动智能车试验平台控制策略设计及性能仿真
张明杰1,王丰元2,刘立强1,邹旭东1,周冬生2
(1.青岛理工大学机械与汽车工程学院,山东 青岛 266520:2.青特集团有限公司,山东 青岛 266109)
针对电动智能车试验平台开发要求,分析确定试验平台自动转向和自动制动等自动控制功能,设计搭建了试验平台的硬件结构。设计基于模型预测控制算法的横向控制器和基于增量式PID、模糊分档式控制算法的纵向控制器,完成对车辆横向和纵向控制。通过Carsim和Simulink建立联合仿真平台对车辆横向运动控制进行了仿真分析,仿真结果表明:智能车试验平台能够较好的跟踪期望行驶路径,并且具有较高的准确性和实时性。
智能车;试验开发平台;智能控制;仿真分析
前言
随着自动驾驶技术的不断发展,车辆智能化程度越来越高,智能车辆在封闭区域拥有很好的应用前景,如观光旅游、区域巡逻、机场摆渡等[1]。车辆控制操作是智能交通不可或缺的部分[2]。目前对智能车辆的研究,多数是在现有汽车平台上安装传感器、控制器等进行智能化改造,这不仅会提高试验平台的开发成本,而且存在车辆冗余部件多、传感器安装位置受限等问题[3]。因此文章在分析自动驾驶需求的基础上,通过功能设计和结构设计,搭建了成本低、便于控制和应用开发的电动智能车试验平台,该平台主要用于研究自动转向、自动制动等自动驾驶技术。
1 平台功能设计
试验开发平台有别于一般汽车试验平台,既要满足驾驶员驾驶需求,又要具备自动驾驶功能。本试验平台自动驾驶系统由三部分组成:信息采集模块、控制决策模块和执行模块。信息采集模块主要采集车辆外界环境信息,经过信号处理发送至控制决策模块,然后结合整车状态信息,根据控制策略,计算各部位电机所需驱动转矩、转速和转动方向,然后生成指令并发送给各电机控制器,即执行模块,最后各电机完成动作执行。自动驾驶试验平台系统组成框图如图1所示。

图1 自动驾驶试验平台系统框图
1.1 自动转向功能
车辆在行驶过程中应该具备沿道路行驶的基本功能,首先车辆应该获取所在道路的基本信息,然后结合车辆自身信息,实时判断车辆行驶状态并调整行驶方向。在行驶过程中,车辆独立完成外部环境感知,信息融合、处理,控制决策和命令执行,实现自动转向功能。
1.2 自动制动功能
车辆在行驶过程中,会遇到减速或者停车的情况,比如车辆进入弯道行驶时,为避免发生危险,应该降低车速;当车辆前方发生紧急情况时,应该及时制动[4]。因此车辆在行驶时需要根据外界信息判断是否需要减速或者停车,并且根据不同工况,执行不同制动策略,保证车辆行驶安全性和稳定性,实现自动制动。
2 试验平台结构设计
2.1 自动转向系统
自动转向系统由两相步进电机和转角传感器组成。两相步进电机代替原有方向盘,通过联轴器、花键与转向柱连接,整车控制器根据采集信息和控制策略给出转向指令,ZC-SR8型步进电机驱动器根据指令向步进电机输出不同频率电压,以此控制转向电机的转速和转角,实现自动转向控制。
2.2 自动制动控制系统
自动制动控制系统主要由CCD摄像机、推杆电机、和霍尔传感器组成。CCD摄像机固定在车辆前方中间位置,相机光轴与地面平行,用于检测前方车辆和道路信息。霍尔传感器安装在后车轮轴附近的车架上,磁钢齿固定在轮毂上,通过检测磁钢齿来确定车速。推杆电机通过电机支架固定在车架上,电机推杆与制动主缸推杆通过螺栓螺母直接连接,需要保证电机推杆轴线与制动主缸推杆轴线在同一直线上,因此推杆电机行程就是制动主缸行程,通过控制推杆电机伸缩行程调节制动力大小,推杆电机最大行程时制动力达到最大值。
3 智能控制策略设计
电动智能车自动驾驶控制包括横向运动控制和纵向运动控制。自动驾驶系统根据外界信息和车辆自身状态信息计算出车辆预期行驶轨迹,横向运动控制目的就是控制车辆既要准确地跟踪预期轨迹,又要保证跟踪过程中车辆的稳定性[5];纵向运动控制主要是控制车辆纵向速度,对车辆横摆稳定性和横向运动控制精度有重大影响[6]。
3.1 横向运动控制策略设计
研究基于模型预测控制(MPC)算法的横向运动控制策略,车辆通过摄像机获取前方道路信息,经过信息处理得到车辆期望行驶路径,为便于控制器处理数据,需要将期望路径进行离散化处理,通过跟踪期望路径上的点,完成车辆控制过程。首先进行车辆动力学分析,简化的车辆动力学模型如图2所示,由车辆坐标系xyz和惯性坐标系XYZ两个坐标系组成。模型应满足以下假设[7]:
(1)假设道路平坦,忽略车辆沿z轴运动。
(2)忽略悬架系统产生的影响。
石墨烯铜复合材料导热性很强,受热面积很小就可达到很好的制冷效果,用它代替普通的铜管,可以减小铜管的管径,减少制冷剂充注量,一定程度上达到高效且环保的效果。石墨烯铜复合材料如图6所示。
(3)只考虑线性范围内轮胎侧偏特性,忽略轮胎力纵横向耦合关系。
(4)忽略空气动力学影响。
(5)忽略系统内部误差的影响。
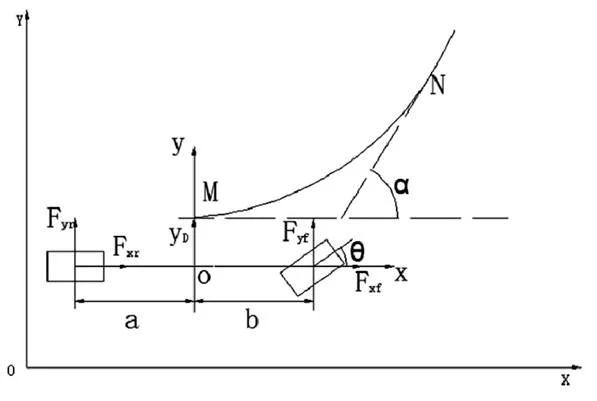
图2 车辆动力学模型
N为车辆下一个跟踪点;为车辆航向偏差角;D为车辆在y方向与期望路径偏移距离;为车轮转向角。
根据车辆动力学模型可以得到沿x轴、y轴和绕z轴的动力学方程:

在车辆动力学基础上引入状态量

将系统状态方程离散化,可得简化模型:

令:

则得到新的状态方程:

在控制时域c和预测时域p中(c 其中 由式(5)可知,只要获得系统当前状态量与控制增量,就可以得到预测时域内系统输出量。但是系统增量是未知的,因此需要设计优化目标函数,求解控制时域内的控制序列,将控制增量作为目标函数的状态量,并加入松弛因子,可得优化目标函数为: 优化目标函数第一项表示系统跟踪预期轨迹的能力;第二项表示系统控制量变化平稳程度;第三项是调节系统收敛速度;表达式(6)不仅使车辆及时、平缓跟踪期望轨迹,并且保证每个时刻都存在可行解。 在控制时域内,目标函数应满足约束条件: 对优化目标函数求解,即可得到控制增量: 最终可得系统控制量: 系统不断循环上述计算,从而实现车辆控制过程。 研究采用前方道路预瞄的方法跟踪期望轨迹,预瞄点应该落在车道中心线上,考虑传感器安装和本身精度误差,经计算和实验分析,设定与期望轨迹偏差5°以内为误差范围。弯道曲率检测比较复杂,因此采用近似曲率的方法判断道路弯曲程度,其原理是将图像中的车道区域沿车辆前进方向分成多个区域,这样弯道被分为多段,在每一段中采用直线检测的方法检测车道线,用直线近似代替曲线,则弯道成为多条线段组成的折线,通过直线斜率的变化判断车道弯曲程度。综合考虑自动驾驶系统实时性和准确性,并通过试验得到不同曲率范围内对应的安全车速。 以上述安全车速为依据,控制轮毂电机和推杆电机实现车辆加减速和制动策略。PID算法在工程中应用广泛,考虑计算量和系统需求量,选择增量式PID算法作为轮毂电机控制算法[8]。其增量表达式为: 其中()为 第k次采样偏差。 在制动时本文采用模糊分档式控制算法,避免了PID控制带来的车辆频繁抖动的缺点,使车辆制动更加平稳,提高了车辆行驶稳定性。控制原理是根据期望车速,将速度偏差和偏差变化量进行模糊量化,然后通过模糊规则得到输出量f(),再经过分档规则和比例因子得到实际输出量u()。根据推杆电机行程范围和模糊论域小于零的元素个数,分档规则如下: 以上控制方法基本实现了车辆加减速和制动控制,但是在两种控制算法之间,应该有适当的切换规则,以保证车辆行驶中的稳定性。纵向运动控制输出量包含速度控制器输出量u和制动控制器输出量u,计算实际车速与预期车速的偏差,以此为依据,制定切换规则如下: 研究利用CarSim建立整车模型,设置车辆各系统参数,然后设定车辆仿真工况。MPC控制器可实现对车辆转向的控制,在Simulink中建立模型预测控制算法控制器,从而建立联合仿真平台。控制器具体参数设定为:=25,c=15,R=5000,-20˚≤≤20˚,-0.5˚≤△≤0.5˚,-30cm≤y≤30cm,-5˚≤≤5˚,Q=diag(1.5,1.5,1,1),=ε=10。 仿真工况:设定车辆直线行驶初始状态:=-3°,采样时间为0.05s,仿真时间为10s,当车速为20km/h和40km/h时,车辆前轮转向角、车辆航向偏差角、车辆横向偏差随时间变化如图3和图4所示。 图3 车速20km/h车辆运动状态参数变化规律 从车速20km/h仿真结果可以看出,车辆开始存在-3°的车轮转角,导致短时间内车辆航向偏差角和横向偏差不断增大,但是MPC控制器快速做出反应,调节车轮转角,使得车辆航向偏差和横向偏差得到及时调整。在控制过程中,车辆航向偏差角回调最大值为0.7°,横向偏差最大值为3cm,说明控制器具有较高的控制精度;在调节过程中,车轮转向角、航向偏差角和横向偏差波动较小,说明控制器具有较好的稳定性;整个控制过程在1.5s内完成,说明控制器具有较好的实时性。 图4 车速40km/h车辆运动状态参数变化规律 从车速40km/h仿真结果可以看出,在初始车轮转角不变的情况下,控制器控制过程变化趋势基本不变,但是车速提高导致车辆航向偏差角和横向偏差增大,航向偏差角最大值为1°,横向偏差角最大值为8.8cm。随着车速提高,车辆航向偏差角对车辆横向稳定性影响大于横向偏差,调整权重因子增加控制器横向稳定性,虽然车辆航向偏差角回调值增大,但是回调速度大大提高。因此无论是低速行驶还是较高速度行驶,该控制器都具有良好的控制效果。 文章设计了电动智能车试验平台的自动转向、自动制动等功能,根据功能要求,设计转向系统和制动系统。在自动转向控制中引入模型预测控制算法,根据车辆航向偏差角和横向偏差及其变化率,控制车轮转角;在自动制动控制中,采用模糊分档式控制算法,与基于增量式PID控制的轮毂电机控制算法配合完成车辆纵向速度控制。最后建立车辆联合仿真平台,对车辆自动转向控制进行仿真,仿真结果表明:基于MPC算法的控制器在车辆转向控制中具有较高的准确性和稳定性,能够满足试验平台要求。 [1] 赵福全,赵世佳,刘宗巍.中国低速电动车产业的现状、问题与未来发展策略[J].汽车工程学报,2017(5). [2] Lee H, Tomizuka M. Adaptive vehicle traction force control for intelligent vehicle highway systems (IVHSs)[J].IEEE Transactions on Industrial Electronics,2003,50(1):37-47. [3] 王建强,赵津,甯油江等.基于dSPACE的智能车自动转向系统设计[J].现代制造工程,2017(2):40-43. [4] Khodayari A, Ghaffari A, Ameli S, et al. A historical review on lateral and longitudinal control of autonomous vehicle motions[C]// International Conference on Mechanical and Electrical Technology. IEEE, 2010:421-429. [5] Li L,Wang F Y. Advanced Motion Control and Sensing for Intelligent Vehicles[M]. Springer US, 2007. [6] Rajamani R. Vehicle Dynamics and Control[J]. 2012, 37(8):111. [7] 余志生.汽车理论[M].北京:机械工业出版社,2009. [8] 张长龙,李文春,马蓉等.基于模糊PID自动转向控制系统的研究[J].农机化研究,2016(11). The Control Strategy and Performance Simulation of Test Platform of Electric Intelligent Vehicle Zhang Mingjie1, Wang Fengyuan2, Liu Liqiang1, Zou Xudong1, Zhou Dongsheng2 ( 1.School of Mechanical and Automotive Engineering, Qingdao University of Technology, Shandong Qingdao 266520; 2.Qingte Group Co. Ltd., Shandong Qingdao 266109 ) According to the development requirements of the electric intelligent vehicle,the automatic control functions such as automatic steering and automatic braking of the test platform are analyzed and determined, and the hardware required to build the test platform is given. The lateral controller was designed based on the model predictive control algorithm, the longitudinal controller was designed based on the incremental PID, and the fuzzy split control algorithm was designed. The controllers ware installed to complete the lateral and longitudinal control of the vehicle.Through the Carsim and Simulink software, a simulation platform was built to simulate vehicle lateral movement control.The simulation results showed that the intelligent vehicle test platform can better track the desired travel path, and has high accuracy and real-time performance. Intelligent vehicle;test and development platform; intelligent control; simulation analysis A 1671-7988(2018)22-17-05 U266 A 1671-7988(2018)22-17-05 U266 张明杰(1992-),男,山东济南,硕士研究生,主要研究方向:智能车辆。 王丰元(1963-),男,山东即墨,教授,博士,主要研究方向:智能车辆,车辆与交通安全。 10.16638/j.cnki.1671-7988.2018.22.006




3.2 纵向运动控制策略设计



4 横向运动控制仿真及分析


5 结论
猜你喜欢
闽江学院学报(2021年5期)2021-11-19
佳木斯大学学报(自然科学版)(2021年3期)2021-07-05
湖北工业大学学报(2021年2期)2021-04-28
兵器装备工程学报(2020年12期)2021-01-12
汽车维修与保养(2019年1期)2019-05-05
汽车电器(2018年12期)2019-01-04
中国测试(2018年9期)2018-05-14
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
科技创新导报(2016年4期)2016-11-19
