基于复合校正的主动杆执行机构控制策略研究
2018-12-06 02:26贾会栋段富海杜东伟
机电工程技术 2018年10期
贾会栋,段富海,※,杜东伟
(1.大连理工大学机械工程学院,辽宁大连 116023;2.航空工业兰州万里航空机电有限责任公司,甘肃兰州 730070)
0 引言
飞机主动杆驾驶装置的一个重要功能是作为“人感系统”向飞行员提供操纵力感觉[1-2]。主动杆装置的执行机构是影响侧杆操纵品质与操纵精度的重要部件[3],它主要有两个作用:一是在飞机自动驾驶模式下拖动驾驶杆手柄旋转;二是在驾驶员主动驾驶模式下给出操纵指令,并给驾驶员提供反馈力。在主动杆装置中,俯仰方向与横滚方向需要分别使用一套执行机构,但由于主动杆的体积与重量都受限,所以在主动杆机械结构设计以及器件的选取时要注意小体积化与轻量化。力矩电机可以直接拖动负载运行,长时间工作在堵转状态,并且具有结构紧凑、响应快、精度高、机械特性好、运行可靠和维护方便等优点[4]。为了缩小主动杆装置的体积与重量、减少机械连接装置,同时提高力加载性能,本文选用永磁直流无刷力矩电机作为主动杆的执行机构。
在驾驶员主动驾驶模式下,对飞机主动杆执行机构的控制过程,也即实现“人感系统”对驾驶员的力加载过程。若要保证飞机的操纵品质,就需要保证力加载系统对驾驶员的操纵力有较高的动态跟踪精度[5-7]。本文以俯仰方向的力矩电机控制为例,设计了基于“电流、转速双内闭环+力外环”的力加载三闭环控制系统的复合校正系统,以此来实现高跟踪精度的力加载。
1 力加载控制系统设计
主动杆装置包括机械结构和控制系统两部分。简单可靠的机械结构是实现主动杆功能的基础保障,在完成机械结构设计的基础上,需要设计科学合理的控制系统才能有效发挥主动杆装置的功能。
本文所设计的力加载控制系统原理框图如图1所示。驾驶员向前推或向后拉驾驶杆手柄时,传感器采集手柄移动位移,并将采集的信号输出到飞控计算机,飞控计算机根据飞机当前状态以及传感器采集的各信号,计算出手柄处在该位置时驾驶员应受到的力,同时控制器根据传感器采集的各类信号,计算出相应的控制信号以控制俯仰方向力矩电机的运动,进而给驾驶员提供反馈力,形成触感,完成力加载过程。
为保证力加载系统的响应速度和跟踪精度,设置三个调节器:力调节器AFR、转速调节器ASR和电流调节器ACR,分别调节力、速度和电流。F*为飞控计算机输出的驾驶员应受到的力,F为力矩电机通过减速机构反馈给驾驶员的力。力调节器的输出Un*作为转速环的给定,转速调节器的输出Ui*作为电流环的给定,电流调节器输出PWM驱动器的控制电压Uct,PWM驱动器输出电机电枢电压Ud。电流调节器与力调节器均采用比例积分调节器,转速调节器采用比例调节器。
2 力加载控制系统的数学模型
2.1 力矩电机的数学模型
本文选用的三相永磁直流无刷力矩电机,采用定子绕组星型连接,两两通电的模式,利用PWM驱动装置将电路传来的直流电压转换为电机绕组的三相电压,从而控制力矩电机的输出转矩。在两两导通的状态下,永磁直流无刷力矩电机可以等效为有刷直流力矩电机。以任意两相绕组导通为例,建立永磁直流无刷力矩电机的传递函数模型。
电压平衡方程为:

式中,Ud:电枢电压;Ra:电枢回路总电阻;Ia:电枢电流;La:电枢回路等效电感;E:电枢感应电势;Ke:反电动势系数;ω:理想空载转速。
电磁转矩可表示为:

式中,Te:电磁转矩;Kt:电机的转矩系数。电机转矩平衡方程:

式中,Tl:负载转矩;Ja:电机电枢的转动惯量;B:粘性阻尼系数。
2.2 力加载控制系统的数学模型
由于电流调节过程比转速调节过程要快得多,因此在进行相应的设计时可以忽略电动机反电动势的影响[8]。根据前面力加载控制系统的原理框图以及力矩电机的数学模型,力加载三闭环控制系统的动态结构框图如图2所示。图中θf为扰动量。
由方框图可以得到力矩电机的输出力为:
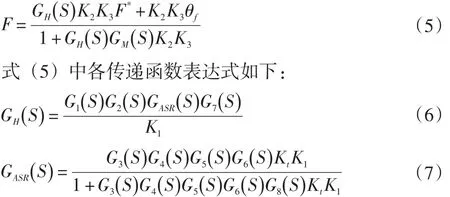

图1 力加载控制系统原理框图Fig.1 Principleblock diagramof forceloadingcontrol system

图2 力加载三闭环控制系统动态结构框图Fig.2 Dynamic structureblock diagramof forceloadingthreeclosed loop control system

2.3 多余力问题
主动杆的力加载系统执行机构是力矩电机,被加载对象是驾驶员的手。在驾驶员操纵驾驶杆的动态力加载过程中,被加载对象做主动运动,力矩电机被迫跟随被加载对象运动,同时对被加载对象进行力加载,在力矩电机受迫运动过程中,由于电磁感应的作用,力矩电机的电枢中会产生反电动势,从而影响电枢电压的大小,最终导致力矩电机的输出力中产生多余力[9-10]。所以对于力加载系统来说,动态力加载时,驾驶员的操纵力是一个很强的扰动。除了驾驶员的操纵外,多余力也可能由飞机自身的控制规律或受到强烈振动导致力矩电机的角位移变化等因素引起。
由式(5)可知,当驾驶员操纵力F*=0时,力矩电机的输出力为:

这部分力就是多余力,多余力的存在将会严重影响力加载系统的输出,甚至会使得力加载系统无法进行力加载。所以需要采用适当的控制策略,尽量减小多余力对系统的影响,从而保证力加载系统的跟踪精度,增强系统的抗干扰性。
3 按扰动补偿的复合校正
按扰动补偿的复合矫正系统如图3所示,图中θf为扰动量,GH(S)、K2和K3为反馈部分的前向通路传递函数,GM(S)为反馈环节的传递函数,GN(S)为前向补偿装置传递函数。

图3 按扰动补偿的复合矫正系统Fig.3 Compound correction systembased on disturbancecompensation

式(12)即为对扰动进行全补偿的条件。但由式(6)可知,GH(S)的分子多项式阶次总是小于或等于分母多项式阶次,所以式(12)的分子多项式阶次总是大于或等于分母多项式阶次,这使得无法在物理上实现全补偿[11]。本文在对系统性能起主要影响的频段内采用近似全补偿的方法,使前馈补偿装置易于物理实现。对系统进行补偿后,多余力即可得到有效抑制。
4 仿真分析
为验证复合校正系统的有效性、鲁棒性、响应速度以及力跟踪性能,本文在Simulink仿真平台中对三闭环控制系统和复合校正系统进行了仿真,并将仿真结果进行分析对比。
(1)三闭环控制系统
驾驶员输入力为100 N,无扰动条件下系统仿真图如图4所示。
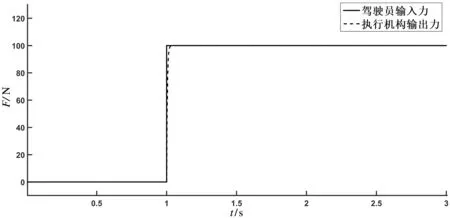
图4 有输入无扰动时三闭环控制系统仿真Fig.4 Simulation of threeclosed loop control system
驾驶员输入力为零,加入幅值为0.02 rad,频率为50 rad∕s的正弦扰动时系统仿真图如图5所示。
图5 零输入有扰动时三闭环控制系统仿真Fig.5 Simulation of three closed loop control system with input and non-disturbancewith zeroinput and disturbance
驾驶员输入力为100 N,加入幅值为0.02 rad,频率为50 rad∕s的正弦扰动时系统仿真图如图6所示。
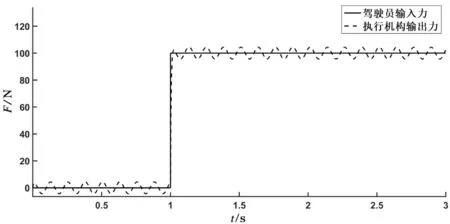
图6 有输入有扰动时三闭环控制系统仿真Fig.6 Simulation of three closed loop control system with input and disturbance
由图4可知,在理想情况即无扰动状态下,系统的响应速度很快,在1.05 s时就达到稳定状态,执行机构的输出稳态误差小于0.5%,所以三闭环控制系统在无扰动时响应速度与力跟踪精度都有较高保障;由图5可知,系统在只有扰动的状态下,执行机构仍有4.4 N的力输出,即多余力达到4.4 N;由图6可知,当系统有100 N的力输入且有扰动时,执行机构的输出稳态误差达到4.4%。
由此可知,扰动的存在对系统的稳定性有很大影响,三闭环控制系统的抗干扰能力不足。
(2)复合校正系统
驾驶员输入力为零,加入幅值为0.02 rad,频率为50 rad∕s的正弦扰动时系统仿真图如图7所示。
驾驶员输入力为100 N,加入幅值为0.02 rad,频率为50 rad∕s的正弦扰动时系统仿真图如图8所示。
由图7可知,当加入前馈补偿装置后,系统在只有扰动状态下,多余力最大为1.1 N,系统稳定后,多余力减小到0.35 N;由图8可知,当系统有100 N的力输入且有扰动时,执行机构的输出稳态误差小于1%。

图7 零输入有扰动时复合校正系统仿真Fig.7 Simulation of acompound correction system

图8 有输入有扰动时复合校正系统仿真Fig.8 Simulation of a compound correction system with zero input and disturbance with input and disturbance
由此可知,当加入前馈补偿装置后,多余力得到了有效抑制,系统的抗干扰性能明显提高,相比三闭环控制系统有更高的力跟踪精度。
5 结束语
(1)以主动杆的力加载系统为研究对象,建立了主动杆的力加载三闭环控制系统数学模型。
(2)以抑制主动杆力加载系统的多余力和提高加载系统抗干扰能力为目标,分析了多余力存在的原因,以力加载三闭环控制系统为基础,采用加入前馈补偿装置的复合校正方法对干扰进行补偿,从而抑制了多余力的存在,提高了系统抗干扰能力。
(3)利用Simulink仿真平台对力加载三闭环控制系统与复合校正系统进行仿真分析与对比,结果表明复合校正系统明显提高了主动杆力加载系统的抗干扰能力,多余力得到了有效抑制。
(4)本文研究对主动杆执行机构的控制系统设计有一定实际应用价值,可为国内主动杆装置的研发提供一定的参考。
猜你喜欢
弹道学报(2022年3期)2022-10-08
天然气与石油(2022年4期)2022-09-21
火力与指挥控制(2022年5期)2022-07-25
北京航空航天大学学报(2022年5期)2022-06-06
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
电子制作(2018年11期)2018-08-04
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27
油气田地面工程(2015年1期)2015-02-09