
基于ANSYS的轮边减速器行星齿轮系有限元分析
2018-12-06 02:05
安顺学院学报 2018年5期
(安徽国防科技职业学院,安徽 六安237011)
引 言
叉车作为物流的一种关键工具,在所有领域的搬运作业中充当着关键角色,叉车包括了以下两类:内燃叉车及电动叉车。内燃叉车应用发动机作为动力装置,使用燃油作为动力能源,既不经济也不环保,还有安全隐患;电动叉车不使用燃油而运用电能作为其动力能源,安全又环保。由于电动叉车使用时具有安全可靠、操作便利、安静、环保等优势,所以于各行各业中都得到了较为广泛的应用,这也加快了电动叉车的发展[1]。
三支点电叉车转弯半径更小,更适合在狭窄通道或有限作业空间内进行物料转运,越狭小的空间越能体现其优越性。根据驱动类型来分电动叉车可以分为以下三类:前轮驱动、全轮驱动及后轮驱动。文中涉及的电动叉车采用的驱动形式为前轮分别驱动,即为前轮驱动三支点电动叉车[2]。
三支点前驱电动叉车由于其工作实际与工作环境,因而要求有较大的传动比和离地间隙,而采用轮边减速器结构可以达到这一要求。轮边减速器的使用可以减去了传统的变速箱、差速器及制动器等部件,既简化了电动叉车整车结构,使整车体积减小,缩短了动力传递路径,提高效率、减少浪费[3]。图1为轮边减速器实物图,图2为轮边减速器的安装位置。
轮边减速器的行星轮系结构下的太阳轮同时与三个行星齿轮啮合,且作为齿轮轴上的结构齿轮需要承受制动工况中的冲击载荷,由于相互之间的应力非常大,对轮齿的强度要求非常高。行星齿轮在工作时,同时受到内齿圈与太阳轮的共同作用,这很可能导致轮齿出现疲劳,最终可能使得轮齿出现折断。因此当研制行星轮系的齿轮时,如何有效的增强轮齿的弯曲强度,提高轮齿运转时的可靠性等问题也是设计过程中必须要考虑的关键点。因此,本文针对轮边减速器里边的核心传动装置行星齿轮系进行静态接触力学性能分析。
通过进一步的分析可以看出,有限元分析方法能够更好地节约成本,能够更加直观的观察到结果。研究过程中,主要是对齿轮的结构进行效率分析,并且阐述了齿轮运行过程中的受力情况。此外,还借助于Pro/E软件构建了具体的三维模型,并且将该模型导入ANSYS软件中进行力学分析,得出了可靠的实验结果与结论。
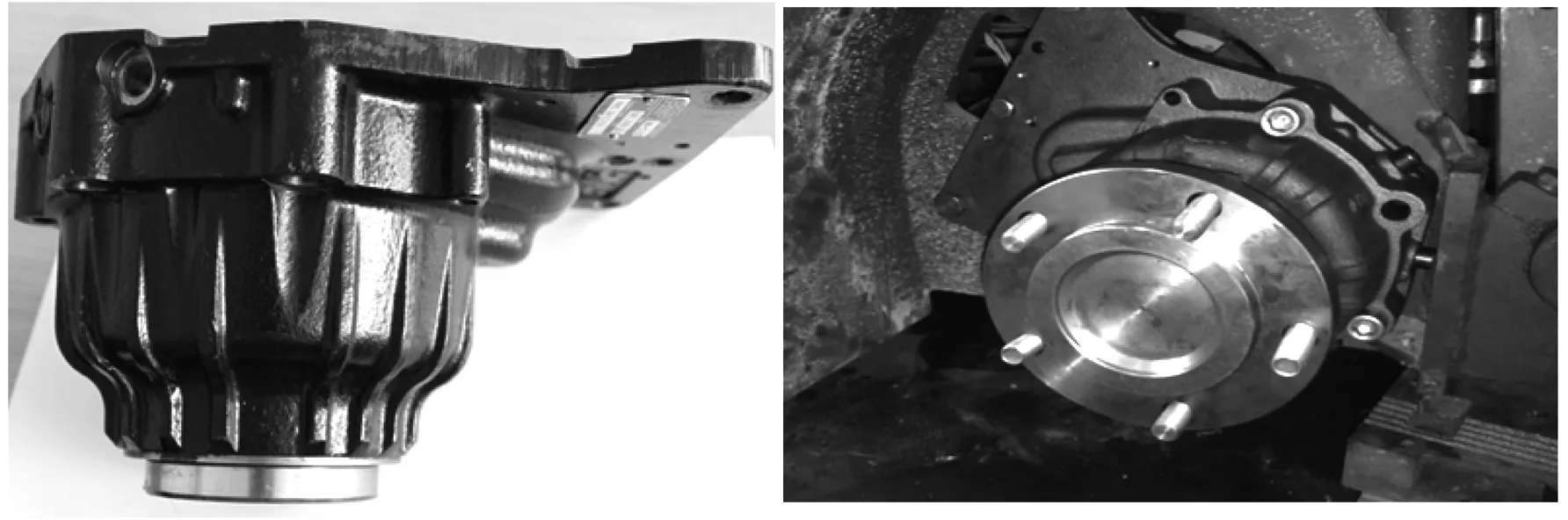
图1 轮边减速器实物图 图2 轮边减速装置在车架上的固定
1 行星齿轮几何模型的建立
轮边减速器作为电动叉车的主要部件,内部带有制动方式的轮边减速器的传动机构,齿轮7与行星架4形成轴向偏心,使得叉车离地间隙变大,提升了叉车通过障碍的能力,通过制动大齿轮6从而制动小齿轮7,这样即可以中断整个轮系的动力源,以此来实现叉车的制动。太阳轮3作为行星轮系的输入齿轮带动行星轮2,行星架4带动轮毂1的转动,从而实现减速制动[4],如图3所示。
对行星齿轮机构进行建模,建模过程中,主要是借助于Pro/E软件来实现的。通过分析可以看出,轮边减速器中一个非常重要的部件就是行星齿轮系。在建模的过程中,必须要确保行星齿轮机构建模足够的精确,只有这样才能够保障有限元分析求解的精度。Pro/E软件在建模方面具有比较大的优势,精确度比较高,因此,能够更好地满足建模的要求。表1为相关参数。
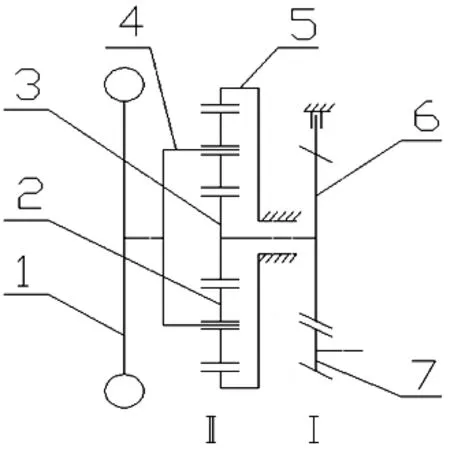
(1-轮毂 2-行星轮 3-太阳轮 4-行星架 5-内齿圈 6-大齿轮 7-小齿轮)图3 三支点前驱电动叉车轮边减速器传动示意图
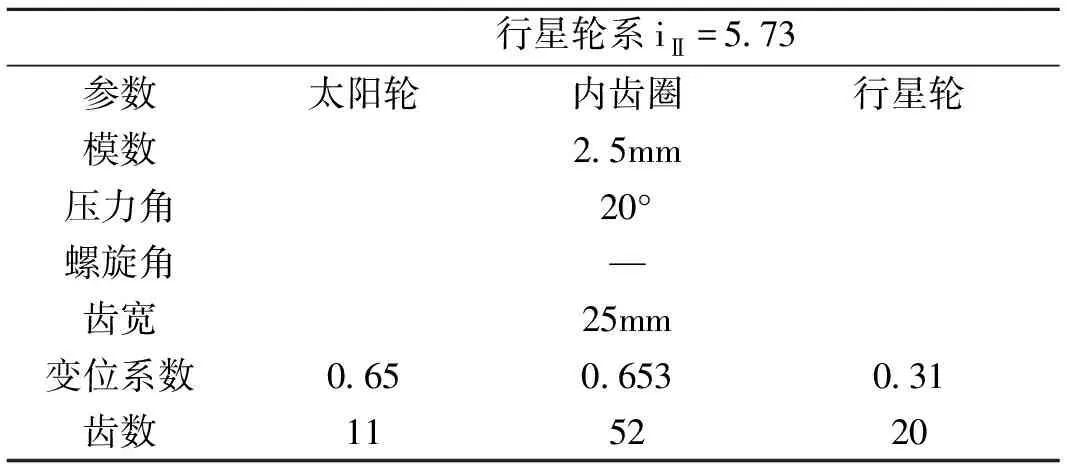
行星轮系iⅡ=5.73参数太阳轮内齿圈行星轮 模数2.5mm压力角20°螺旋角—齿宽25mm变位系数0.65 0.653 0.31齿数 11 52 20
电动叉车轮边减速器中的传动齿轮均采用渐开线直齿轮。轮边减速器的对应参数在设计时就已经确定好,见表2。
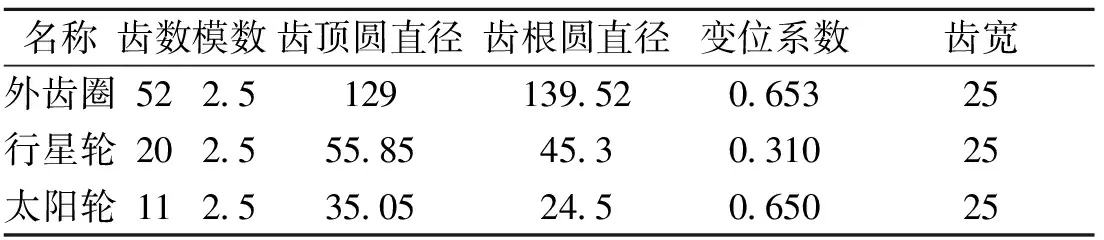
表2 行星齿轮机构参数表
通过Pro/E的参数化功能,以上表为依据,创建精确的三维实体模型,如图4、图5。
2 有限元模型的建立
借助于有限元分析方法进行处理的过程中,接触问题实际上是一种边界非线性问题。而在工程非线性数值解法方面,目前已经有多种方法可供选择,其中,直接迭代法等是用的比较多的,文中采用牛顿-拉普森迭代法进行计算[5]。
2.1 牛顿-拉普森迭代法
可一阶求导的连续函数ψ(δ)=0,在δn点作一阶泰勒级数(Taylor)展开,它在δn的线性近似公式是:
因此,非线性方程ψ(δ)=0在δn附近的近似方程是线性方程:
记Δδn=δn+1-δn,它的解为:
上式就是牛顿-拉普森法迭代公式,能够求解方程ψ(δ)=0。通过对图6的分析可以看出,曲线实际上已经反映了整个求解过程。从该方法来看,其具有比较好的收敛性,但如果要经过多次迭代操作,每一次都要形成新的切线刚度矩阵[6]。
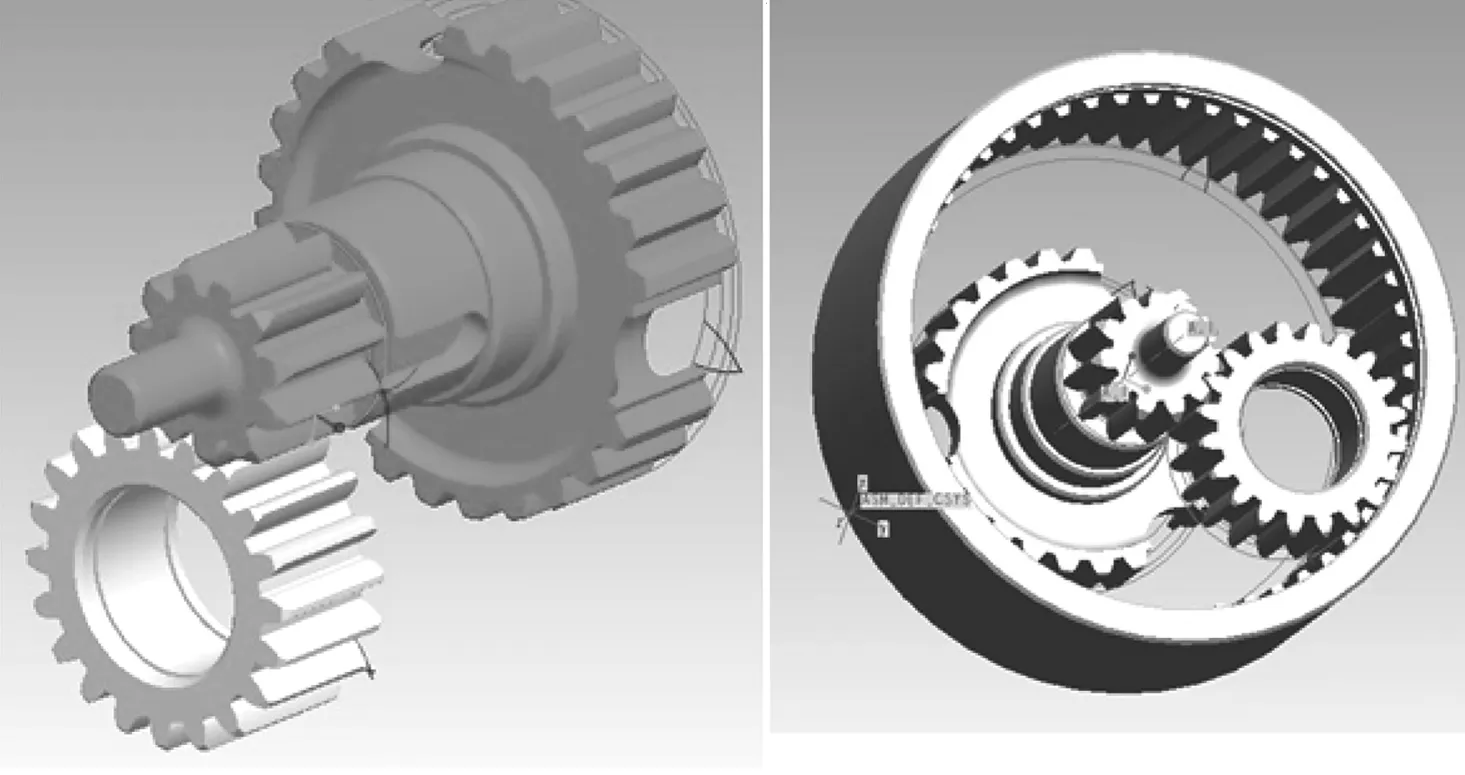
图4 行星轮与太阳轮装配图 图5 行星轮系总装配图

图6 牛顿-拉普森迭代法
2.2 修正的牛顿-拉斐逊方法
2.3 模型导入及网格划分
在表3的基础上,进一步对实体模型进行构建。建模过程中,需要结合有限元分析软件的具体需求,在符合要求的前提下,去掉一些和分析没有关系的部件,从而使模型得到简化。模型的构建如图7所示。在操作过程中,借助于Pro/E与Ansys之间的数据传输来完成三维模型导入。
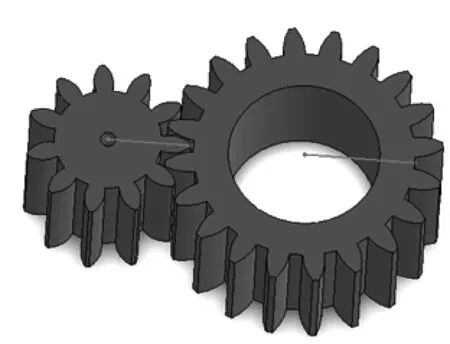
图7 行星齿轮啮合对装配与简图

齿轮材料20CrMnTiσFP693MPaσHP750MPaTa168N·M模数m2.5 mm弹性模量207 GPa压力角20°泊松比0.25齿宽25 mm重合度2.4齿数za=11zb=20变位系数xa=0.65xb =0.31
对单元类型以及材料的属性进行定义。材料属性的界定,需要严格按照表3中的相关参数来进行,以此为依据,划分有限元网格,完成有限元模型的建立,得到的模型包含节点共计45959个,单元27284个,如图8所示。

图8 行星齿轮啮合对有限元模型
2.4 定义接触对
把太阳轮和行星轮确定为接触面及目标面。相关的数据如表4所示。最终得到的具体模型如图9所示。
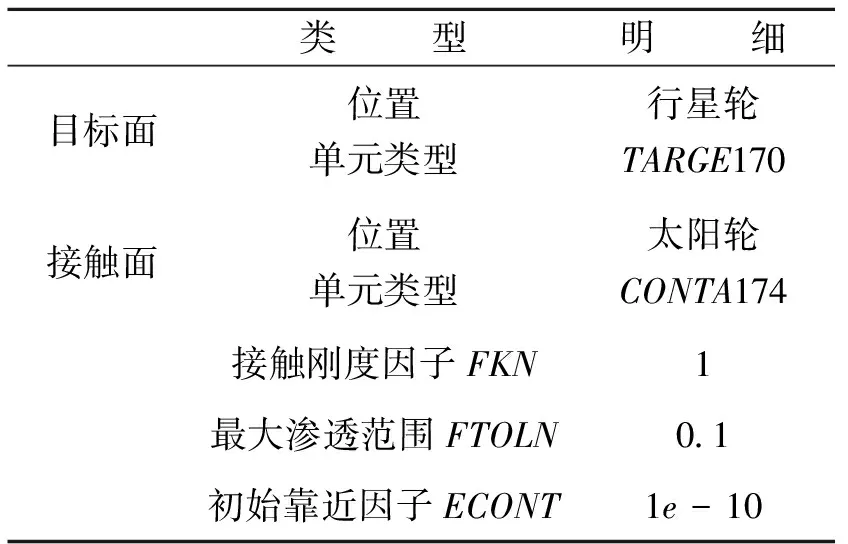
表4 接触对明细表

图9 接触对有限元模型
3 边界条件及载荷施加
3.1 边界条件
在模型建立以及接触对设置完成基础上,还应当对相关的节点等作进一步的处理。二者啮合时,将行星齿轮视为静止,只考虑太阳轮的运动,而不作其他运动的约束条件。
3.2 载荷施加
对于通过齿轮传动的机械,两个齿轮相互接触时,往往是线接触,由于接触面之间存在着塑性变形,线接触极易形成面接触。受力分析时,将载荷集中在一条线上时,将会出现较严重的应力集中现象,因此为了避免此现象的出现,可通过添加圆周切向力进行调节,如图10所示,以等效传递扭矩(假设传递效率为1),则行星轮的圆周切向力为
(Ta-转矩;d-内圈直径;n-节点数;fn-切向力)

图10 对行星轮加载圆周切向力
由表3中数据得到动力传动到行星轮的转矩为Ta=168N.M,d=45.3mm,n=4860,圆周切向力
具体加载设置如表5所示,加载如图11

表5 行星轮加载

图11 加载图
4 求解结果
在正式进行求解时,还需要先设置好具体的非线性求解特性,并且设置变形模式为LargeDisplacementStatic。求解过程中,时间设定为1,子步数和最大子步数分别为20和50。此外,还需要将LineSearch项置On。不仅如此,还要进一步将DOFsolutionpredictor项置为Onforallsubstep。进行求解工作,图12为啮合齿轮对的等效应力分布图,数值显示出现在太阳轮受力轮齿的侧齿根处。图13为等效应力分布情况,最大应力数值为78.1MPa。
5 结果分析及优化
5.1 结果分析
如果借助于表3中的具体参数来建立齿轮,并施加一定的约束和载荷,此时有σmax=979MPa。对于齿面接触部位来说,最大应力为78.1MPa。
与表3做对比,齿面接触强度在规定数值之内,然而齿根弯曲应力数值偏大,最大齿根弯曲应力超出齿轮材料许用弯曲应力的45%,情况严重会导致轮齿折断,齿轮工作失效。
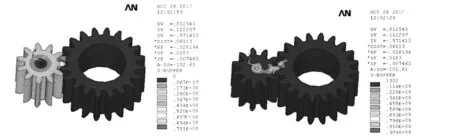
图12 啮合齿轮对分析应力云图 图13 轮齿齿面接触应力云图
5.2 优化
齿面修形。在对啮合齿轮进行齿面修形时,可以通过两种途径来实现。具体如表6所示。首先,可以采用齿轮高度变位的方式来进行。两个轮的变位系数分别为xa=0.77和xb=0.25。进行分析之后获得啮合齿轮对的等效应力分布及大小如图14所示。齿面接触应力云图如图15所示。其次,可以在第一种途径的基础上,调整齿轮的压力角,从一开始的20°调整为24°。在此基础上,再次进行仿真求解。最终的应力分布及大小和齿面接触应力云图分别如图16和图17所示。
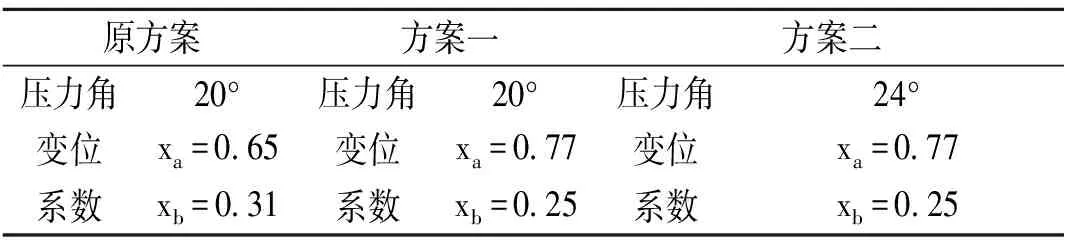
表6 太阳轮与行星轮修形啮合参数优化方案
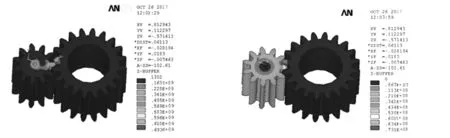
图14 太阳轮轮齿根弯曲应力云图(方案一) 图15 齿面接触应力云图(方案一)
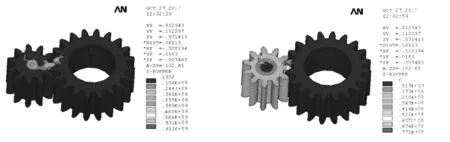
图16 太阳轮轮齿根弯曲应力云图(方案二) 图17 齿面接触应力云图(方案二)
由此可见,对于不同的齿轮参数,得到不同的应力数值,对这三种方案进行分析如下表7:

表7 各方案分析比较
通过对上述两种优化途径的分析可以看出,第一种主要是对变位系数进行调整;第二种途径不仅要调整变位系数,而且还要调整压力角的大小。通过增大压力角,能够使得齿轮的承载能力得到提升,但亦存在某些方面的不足,如齿轮加工精度不足、要求使用特殊刀具等。综上所述,根据现实状况,对所分析的行星齿轮对运用方案一来增强太阳轮与行星轮的承载能力比较合理。
6 结论
借助于ANSYS软件对电叉车轮边减速器行星齿轮传动中的行星轮系进行有限元分析,根据分析结果,结合材料性能的要求,对相关的参数作进一步的优化处理,齿轮啮合副能够更好地满足要求,从而使得轮边减速器的可靠性得到进一步的提升,使得设计周期得到缩短,最终实现节省生产成本的目的。
猜你喜欢
中国储运(2022年11期)2022-11-30
中国储运(2022年11期)2022-11-30
中国储运(2022年11期)2022-11-30
西北工业大学学报(2022年3期)2022-07-21
中国重型装备(2022年2期)2022-04-19
科学技术创新(2021年19期)2021-07-16
西安科技大学学报(2021年3期)2021-06-17
南京工程学院学报(自然科学版)(2021年4期)2021-02-23
建材发展导向(2019年10期)2019-08-24
中国科技纵横(2017年17期)2017-10-19
