
北斗三号试验卫星对短基线RTK定位性能影响分析
2018-12-03 07:11:04刘金海黄小东张鹏飞卢晓春
导航定位学报 2018年4期
刘金海,张 睿,涂 锐,黄小东,张鹏飞,卢晓春
(1.中国科学院 国家授时中心,西安 710600;2.中国科学院 精密导航定位与定时技术重点实验室,西安 710600;3.中国科学院大学,北京 100049)
0 引言
北斗卫星导航系统(BeiDou navigation satellite system,BDS)是中国着眼于国家安全和经济社会发展需要,自主建设、独立运行的卫星导航系统,是为全球用户提供全天候、全天时、高精度的定位、导航和授时服务的国家重要空间基础设施[1]。BDS的发展分为3个阶段:第1阶段,北斗一号,4颗卫星被部署到地球静止轨道(geostationary Earth orbit,GEO)组成试验系统;第2阶段,北斗二号,由5颗GEO卫星、5颗倾斜地球同步轨道(inclined geosynchronous orbit,IGSO)卫星、4颗中圆地球轨道(medium Earth orbit,MEO)卫星组成北斗区域导航定位系统,从2012年12月27日开始为亚太地区用户提供连续的定位、导航、授时(position,navigation,timing,PNT)服务[2];第3阶段,北斗三号,将在2020年为全球用户提供定位导航授时服务。已经完成的北斗一号和北斗二号发挥了及其重要的作用,为北斗三号的建设奠定了基础。
从2015年3月开始,已经发射了5颗北斗三号试验卫星,其中2颗IGSO(C31,C32)卫星、3颗MEO(C33,C34,C35)卫星,增加了BDS实时动态(real time kinematic,RTK)定位可视卫星数,增强了观测卫星的图形强度,而且卫星激光测距(satellite laser ranging,SLR)的验证结果表明北斗三号试验卫星的轨道性能比北斗二号卫星略优[3]。理论上来说,将对BDS RTK定位精度以及可靠性有一定的提升。但是目前的文献尚缺少研究北斗三号试验卫星对BDS RTK定位性能的验证与分析。因此,本文在亚太地区以澳大利亚为例,利用MGEX提供的实测数据,设计了2组试验,对BDS短基线RTK定位性能进一步验证与分析,为BDS RTK在实际应用和科学研究提供参考。
1 BDS RTK模型
RTK技术,常用双差观测模型,对于短距离用户,可以采用非组合观测值,不考虑电离层、对流层等大气残差;对于长距离用户,电离层残差可以采用双频无电离层组合模型消除或与对流层残差一样,引入未知参数进行估计补偿[4-10],来提高模糊度浮点解的精度,从而实现高精度定位。
1.1 观测方程
双差观测方程不仅消除了卫星钟差、接收机钟差,而且大大削弱了电离层延迟误差、对流层延迟误差以及卫星轨道误差等误差的影响,因此本文采用双差观测值求解载波相位整周模糊度。伪距和载波相位双差观测方程为
Δ
(1)
λΔ
Δ
(2)
1.2 整周模糊度解算
整周模糊度解算是实现RTK的关键,可以分为以下3个步骤[11]:
1)P码伪距和载波相位观测值组成Melbourne-Wübbena组合(M-W),计算双差宽巷整周模糊度ΔNw,采用多历元均值滤波可削弱观测值噪声的影响,然后进行四舍五入取整即可解得双差整周宽巷模糊度[12],双差方径为
Δ
(3)
式中:下标W表示宽巷;f为载波频率。
2)双差伪距观测值和双差载波相位观测值进行无电离层组合(ionosphere-free,IF),采用序贯平差方法解算得到双差无电离层组合模糊度的实数解ΔNIF+,双差观测方程可表示为
(4)
式中下标IF表示无电离层组合。
3)根据1)中解算的双差整周宽巷模糊度、2)中解算的双差无电离层模糊度实数解和相应的方差协方差矩阵得到双差B1模糊度的实数解和对应的方差协方差矩阵,然后使用最小二乘去相关算法[13](least-squares ambiguity decorrelation adjustment,LAMBDA)搜索并固定双差B1整周模糊度。
2 BDS RTK试验及结果分析
2.1 试验数据及方案
试验采用MGEX提供的2017年年积日(day of year,DOY)第125天测站STR1和TID1的观测数据,采样间隔为30 s,国际GNSS监测评估系统(international GNSS monitoring & assessment system,iGMAS)提供的广播星历,模拟实时解算。测站基本信息如表1所示,测站坐标精确已知,基线长约10 km。STR1和TID1观测数据中BDS卫星可视情况随协调世界时(coordinated universal time,UTC)时刻的变化图分别见图1和图2。

表1 测站基本信息
为了研究北斗三号试验卫星对BDS RTK定位精度的影响,本文在完整弧度卫星数较多的观测时段UTC 17∶ 00—20∶ 00共设计了表2所示2组BDS RTK试验,考虑全部卫星参与解算的结果和选择C01、C03、C04、C07、C08、C10、C12、C13、C31、C32、C33参与定位解算的结果差异很小,因为在该观测时段开始时,C09的高度角就小于高度角阈值10°,然后逐渐观测不到;而在该观测时段后期,C11慢慢升起来,在大于高度角阈值10°时才开始参与解算,对定位结果精度改善很小,由于其高度角较低,测量噪声偏大,甚至会使得定位结果变差。
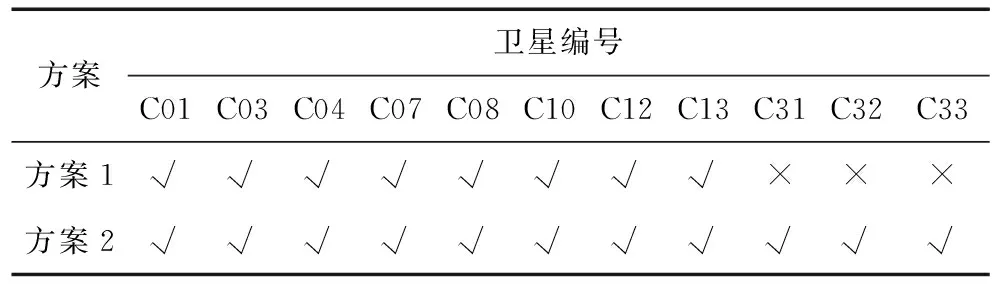
表2 BDS RTK实验方案
注:“√”表示该卫星参与定位解算,“×”表示该卫星不参与定位解算。
2.2 不同方案定位精度比较
图3~图4显示了UTC 17∶00—20∶00不同方案下的北(N)方向、东(E)方向和天顶(U)方向的定位误差时序图,可以看出不同方案下BDS RTK都能够提供较稳定的定位结果,绝大部分的定位结果N、E、U方向上的偏差优于0.07 m。方案2相比于方案1,增加了3颗北斗三号试验卫星,对定位结果有一定程度的改善,证明了北斗三号试验卫星在BDS RTK中的可用性,并且对BDS RTK定位精度的提高有一定的贡献。
表2给出了BDS RTK试验方案中定位结果标准偏差(standard deviation,STD)的统计结果,水平方向优于0.01 m,高程方向优于0.02 m。统计结果表明,增加北斗三号试验卫星对BDS短基线RTK定位结果U方向精度提升不明显,N、E方向精度的提升比较明显,分别达到33.3 %、12.5 %。

表2 BDS RTK试验方案N、E和U方向STD统计 m
3 结束语
本文在亚太地区以澳大利亚为例,基于MGEX 2017年DOY第125天测站STR1和TID1的观测数据,iGMAS提供的BDS广播星历,模拟实时解算,研究分析了不同方案下北斗三号试验卫星对BDS短基线RTK定位精度的影响,得到以下几条结论:
1)BDS短基线RTK能够提供较稳定的定位结果,绝大部分定位结果N、E、U方向上的偏差优于0.07 m;
2)BDS短基线RTK试验方案中定位结果STD水平方向优于0.01 m,高程方向优于0.02 m;
3)增加北斗三号试验卫星对BDS短基线RTK定位结果U方向精度提升不明显,N、E方向精度的提升比较明显,分别达到33.3 %、12.5 %。
另外,本文研究主要集中在短距离BDS RTK定位,对于中长距离BDS RTK的数据处理模型、定位性能以及三频数据处理等问题,还有待进一步深入研究。
猜你喜欢
北京大学学报(自然科学版)(2022年4期)2022-08-18 06:41:26
大地测量与地球动力学(2022年1期)2022-01-11 10:23:02
空间科学学报(2021年4期)2021-08-30 08:31:16
空间科学学报(2021年2期)2021-07-21 08:43:28
高技术通讯(2021年3期)2021-06-09 06:57:46
大地测量与地球动力学(2021年10期)2021-04-17 00:51:00
科学(2020年5期)2020-11-26 08:19:14
石油地球物理勘探(2017年4期)2017-12-18 07:14:49
雷达学报(2017年6期)2017-03-26 07:53:02
舰船电子对抗(2016年5期)2016-12-13 08:41:14
