
旅客捷运系统在超短安全防护距离下的列车停站信号控制方案
2018-11-16 06:55王之峰陆惠丰
城市轨道交通研究 2018年11期
王之峰 陆惠丰
(上海市政工程设计研究总院(集团)有限公司, 200092, 上海//第一作者,高级工程师)
1 研究背景
1.1 工程条件
上海浦东国际机场旅客捷运系统工程(以下简称“本工程”)采用钢轮钢轨地铁A型车,设计规范基本参照现行的《地铁设计规范》。具体的车站及线路布置如图1所示。其中,T2航站楼站的工程条件为:列车总长度94.4 m,在轨道东线准确停站时(列车中心线与车站中心线对齐),北端车头距轨道端头18.3 m。列车在T2航站楼站准确停站位置示意如图2所示。
1.2 面临的问题
上述工程条件中,站后安全距离仅为18.3 m,与现行GB 50157—2013《地铁设计规范》、STB/ZH-000001-2012《上海城市轨道交通工程技术标准》中关于安全防护距离与安全线的设置标准值(50 m或40 m)差值较大。因此,必须对本工程信号系统进行针对性的特殊设计,才可确保捷运列车运行(进站、停车)的安全性。
1.3 研究思路
鉴于上述情况,为确保捷运列车运行(进站、停车)的安全性,并尽可能兼顾旅客舒适度和列车运行效率,本工程信号系统在实施前需要考虑:
(1) 信号系统需在土建实际条件下,结合行车、车辆、轨道等参数对列车进入T2航站楼站的减速-停车控制方案做特殊设计。
(2) 需要结合信号系统供应商的具体系统做进站-停车的仿真计算,初步确定信号系统控制方案原理及其可行性。
(3) 相关信号系统供应商需在实际的轨道交通线路上做进站-停车的现场测试,对软件仿真结果进行验证。
(4) 以上研究获得的数据和结论,可作为后续信号系统设备招投标、深化设计、系统安装调试、竣工验收等工作的技术支撑文件。
2 标准安全制动模型
IEEE 1474.1—2004中对移动闭塞下的安全制动模型做出规定,如图3所示。

注:ATP—列车自动防护; GEBR—紧急制动保障率
图3 IEEE 1474.1安全制动模型
IEEE 1474.1安全制动模型要求,在充分考虑速度不确定性、位置不确定性的安全前提下,车载信号系统需根据车辆的最不利反应对列车前方的授权终点进行紧急制动(EB)防护,以保护行驶中的列车,包括触发安全防护后静止的列车都不会越过移动授权终点。本工程信号系统的设计同样需要基于IEEE 1474.1安全制动模型。
3 本工程安全制动模型
本工程信号系统将不可撞击的车挡位置处的列车速度设为0进行防护,即不可越过的位置。根据车辆相关参数,将IEEE 1474.1安全制动模型按最不利的安全侧方向简化为失控加速三阶段,进行安全制动模型的安全防护,如图4所示。
(1) 本工程信号系统持续测量列车的速度、位置,测速测距为安全功能。当对终端进行安全防护时,信号系统向安全侧考虑列车最不利情况,即最大可能速度(当前车速+速度不确定性)和最远的车头位置(当前车头位置+位置不确定性)。
(2) 最不利情况下,判断触发EB后,信号系统设计保证了最长的EB继电器落下时间为t0;
(3) 最不利情况下,列车处于全牵引工况,判断触发EB后,车辆最长牵引切除时间t1为t0+最不利车辆牵引切除时间。
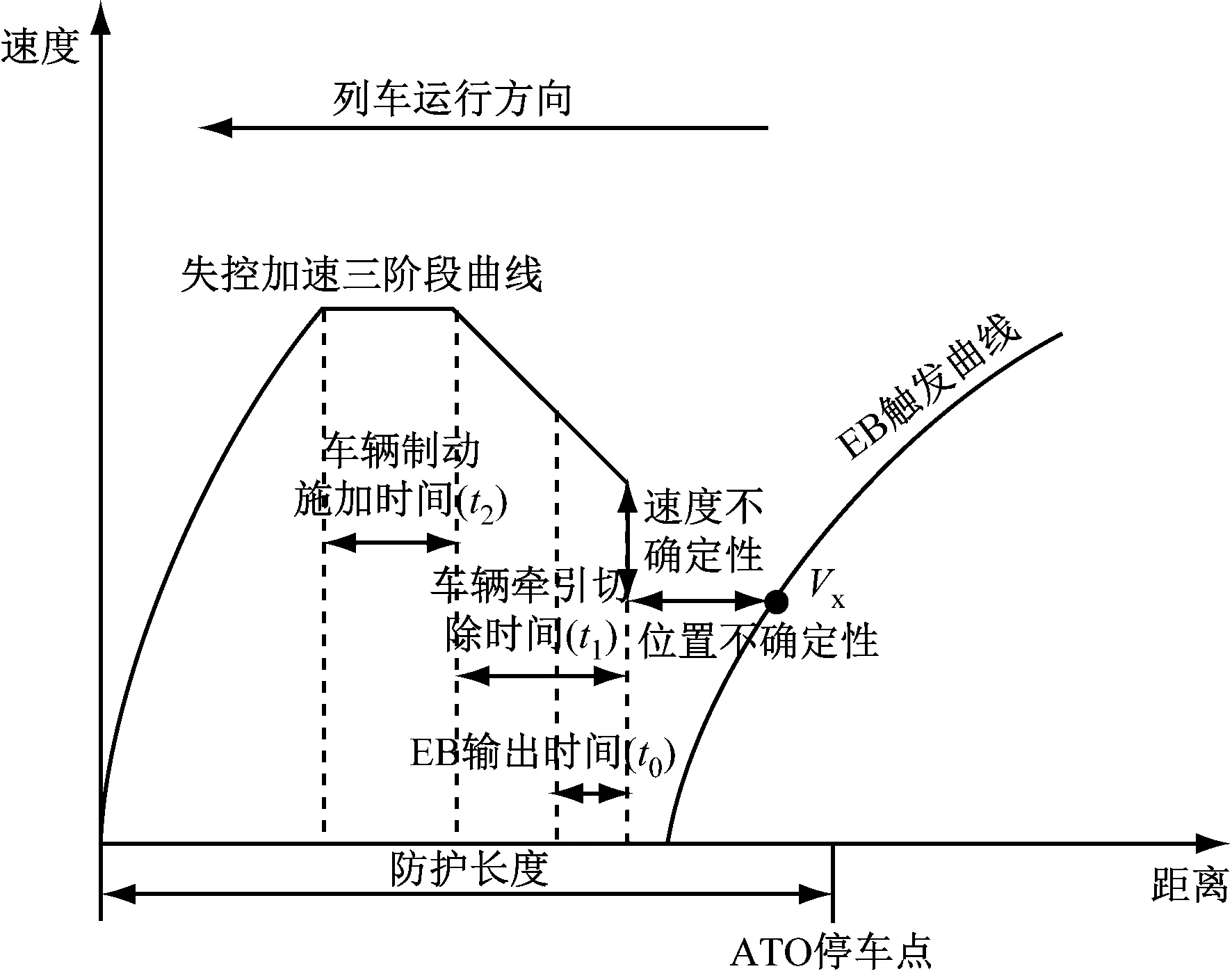
图4 三阶段安全制动模型
(4) 最不利情况下,判断触发EB后,车辆最长制动施加时间为牵引切除后的t2;
(5) 最不利情况下,车辆施加的紧急制动率为列车保证的紧急制动率。
基于上述安全制动模型,本工程信号系统编制了相应的算法软件,由于涉及信号系统供应商的知识产权,本文在此不做具体说明。
4 安全防护下的列车自动运行(ATO)控制策略
当列车以ATP或ATO方式运行时,信号系统时刻防护列车冒进终端。
当列车以ATO方式行车时,将时刻受ATP的保护,ATO更关注调整列车速度,以避免频繁触及ATP EB制动触发曲线,导致EB,进而产生系统可用性较差问题。
如图5所示,在充分考虑信号系统的性能、车辆的性能、命令反应时间等因素的基础上,在EB触发曲线的基础上减去一个ATO控制门限(可调,典型值不大于1 m/s)作为允许速度-距离曲线,使ATO能将车速控制在此允许速度-距离曲线范围内而不触发EB。即允许速度-距离曲线为ATO的可控速度顶棚。
ATO将车速控制在允许速度-距离曲线下方则不会触发EB。其也可采用比该曲线更低的速度曲线使列车停靠在允许速度-距离曲线下方的目标停车点,但会造成:① 列车过早以较慢速度进站,不必要地牺牲了效率;② 进站时间拉长,乘客需要更加耐心等待;③ 列车先降至低速,再以低速进站(如图5中普通站台的ATO停车曲线),停站的环节中造成更多的加速度变化而影响舒适度。
因此,本工程不推荐过早降速进站的方案,而推荐采用允许速度-距离曲线作为ATO停车曲线的控制依据,以使进站效率最大化。
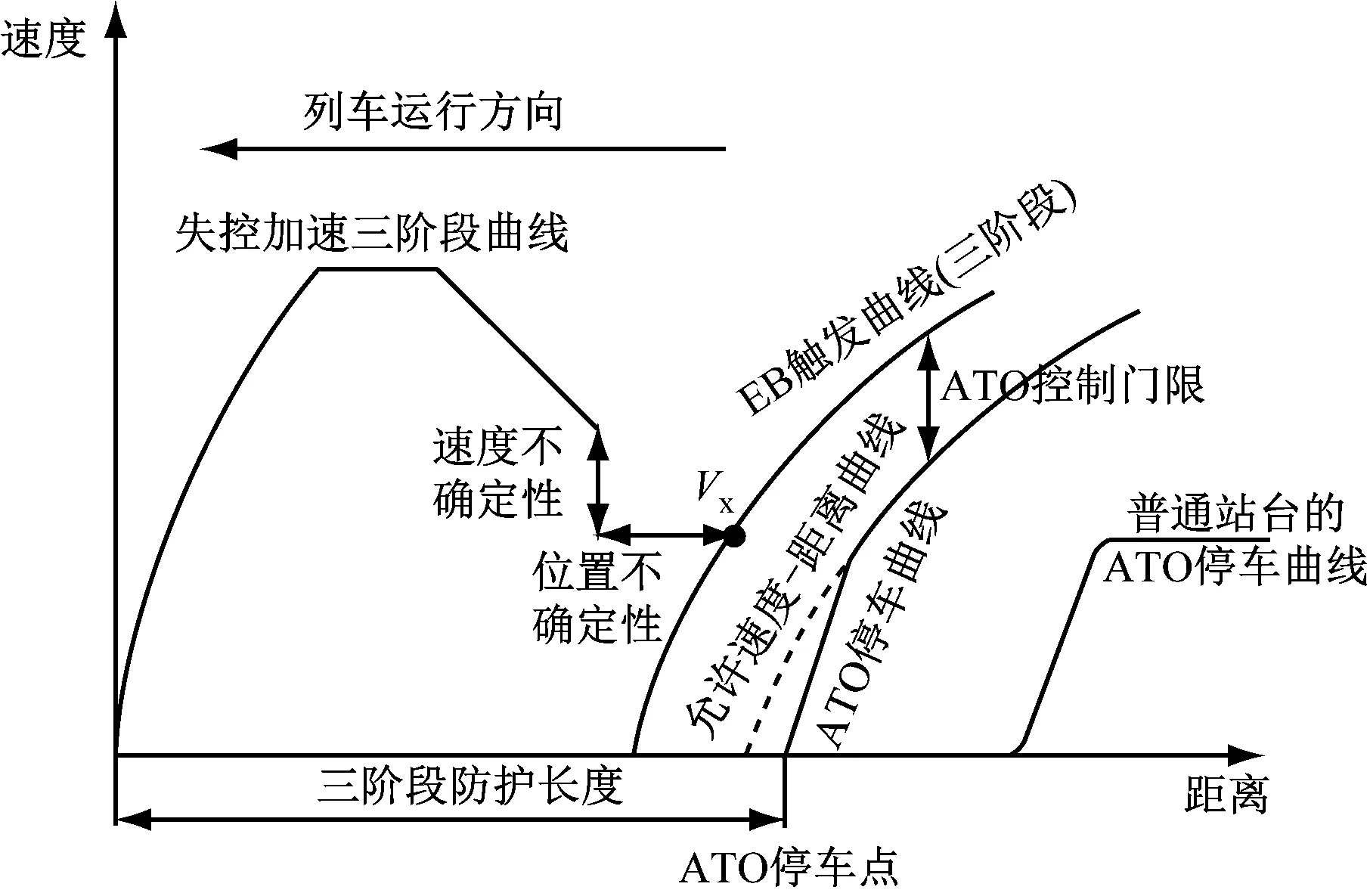
图5 ATO行车曲线示意图
该方案能在终端防护距离一定(即ATP防护速度一定)时,使ATO最大限度地利用行车速度的空间,将效率最大化。当ATO停车点位于允许速度-距离曲线下方时,该停车点即可认为是可控的ATO停准位置。根据本工程的线路情况和安全参数条件,经仿真计算,本方案支持极限情况下低至9.112 m防护距离的ATO进站停车。如图6所示。

图6 极限情况下的ATO进站曲线图
5 现场测试
相关信号系统供应商利用在线测试系统,模拟本工程实际条件,在特定的系统参数值设置条件下进行现场测试。建设单位、设计单位及信号系统供应商全程参与、见证了现场测试过程。
(1) 主要系统参数值:与仿真计算条件一致。
· 车辆切牵引时间:0.5 s(暂定);
· 车辆切牵引后至施加90%紧急制动时间:1.2 s(暂定);
· 车辆失控加速度:1 m/s2(车辆典型参数);
· 紧急制动保障率:0.95 m/s2(暂定);
· 信号系统最不利的EB时间:0.53 s(含车辆接口继电器落下时间);
· 加加速度限制:0.75 m/s3;
· 站台最高限速:40 km/h(可运行达到的速度,命令速度)。
(2) 测试目的:对列车的ATO精准对站与ATP超速防护功能进行验证测试;对仿真计算的结果进行验证。
(3) 主要测试结果:见表1。
① 列车以正常的ATO方式进站时:存在进站停车对位的“欠”与“过”情况,但差值不大,均在规范允许的范围之内;采用缓冲车挡与采用固定车挡没有太大区别。
② 列车以一定速度(29 km/h)触发EB后:进站停车对位的情况基本为“欠”;采用固定车挡优于采用缓冲车挡。
③ 列车以低速(4 km/h)触发EB后:进站停车对位的情况为“过”,但停车位置均未超过本工程车挡(按距离测算);采用缓冲车挡优于采用固定车挡。

表1 列车进站停车的主要测试结果
6 结语
分析信号系统供应商的仿真计算和现场测试结果,可以初步确定:针对本工程的特定安全防护距离条件,信号系统基于IEEE 1474.1安全制动模型进行特殊的列车进站控制方案设计,可以实现捷运列车运行(进站、停车)的安全性,并能适当兼顾旅客舒适度和列车运行效率。
猜你喜欢
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
铁道通信信号(2020年1期)2020-09-21
铁道通信信号(2019年9期)2019-11-25
小学生学习指导(低年级)(2019年6期)2019-07-22
铁道通信信号(2018年12期)2019-01-31
铁道通信信号(2018年7期)2018-08-29
祖国(2018年6期)2018-06-27
阅读(科学探秘)(2018年8期)2018-05-14
铁道通信信号(2016年11期)2016-06-01
