
基于PSCAD/EMTDC的复转矩系数法的时域实现及对电气阻尼影响的研究
2018-11-16 01:25
传感器世界 2018年2期
北京信息科技大学自动化学院,北京 100192
一、引言
电力系统次同步振荡(Sub-synchronous Oscillation,SSO)是指电力系统受到扰动导致偏移其平衡点后,电网与汽轮发电机组之间在一个或多个低于系统同步频率的固有频率交换能量而产生的一种状况或现象[1]。
近几年来,我国一些大型电厂采用较高串联电容补偿度的对网输电模式。由于存在串补输电、交直流混合输电系统导致的次同步振荡,对电网和发电机组造成重大威胁。
对SSO的分析方法主要有频率扫描法、特征值分析法、复转矩系数法等。
频率扫描法主要是定性分析与筛选发电机组,筛选出存在次同步振荡风险的机组,计算方法比较简单、易懂且快速,但缺点是误差比较大[2];
特征值分析法是小扰动分析法,其优点是理论严密、分析准确度高,但缺点是存在严重的“维数灾难”;
复转矩系数法是在特征值分析法的基础上发展起来的方法,由I. M. Canay 提出[3],并建立了包括电气、机械两部分的扭振方程以及稳定性判据,它也是基于系统线性化原理的一种方法,但比特征值分析方法简单,主要用于分析电力系统次同步振荡和轴系扭振[4-5]。
本文基于PSCAD/EMTDC电磁暂态仿真平台对复转矩系数进行实现研究,为了提高仿真精度,对实现过程中作出了一些改进,并给出可参考的标准。以IEEE第一标准测试系统为研究模型,分析了线路串联电容补偿度对电气阻尼的影响。
二、复转矩系数法的基本原理
复转矩系数法是一种频域分析方法,其主要基于线性化模型。复转矩系数法的原理如下:

典型大型汽轮机的发电机组轴系一般有6个质量块,分别为发电机、励磁机、高压缸、中压缸和2个低压缸,通常把这些质量块视为集中质量块,每个质量块之间为无质量的理想弹簧连接,形成多质量—弹簧系统,如图1所示。通常发电机轴系运动方程为:

式中,δ—轴系质量块电气角位移,δ=(δ1δ2δ3δ4δ5δ6)T,其中,δ5为发电机转子的电气角位移;
ωi—轴系第i个质量块的电气角速度,其中,ω5为发电机转子的电气角速度;
ω0—运行状态稳定下的发电机的角速度;
τ—轴系质量块惯性时间常数矩阵,τ=diag(τi,τ2,τ3,τ4,τ5,τ6);
T—轴系质量块的转矩矩阵,T=(T1T2T3T4T5T6)T;
K—发电机轴系的弹性系数矩阵,其中,Ki,i+1为相邻质量块之间的弹性系数;

D—发电机轴系的阻尼矩阵,其中,Dii为第i个质量块的自阻尼系数,Di,i+1为相邻质量块之间的互阻尼系数。

首先,在运行点进行线性化,之后可得:


Δδ—相邻质量块的电气角位移差;
ΔTe—电磁转矩增量;
ΔTM—机械转矩增量。
忽略汽轮机出力变化,并消去发电机以外质量块转角可得:

式中,km(p) —机械转矩系数;
Δδ5—发电机电气角位移差。
定义等式(3)的第一项为“机械系统转矩增量”,ΔTm(p)=km(p)Δδ5,其等效于轴系动态元件,与轴系相对应的一个虚拟转矩增量,与式(2)中的ΔTM是两个不同的概念。式(3)可以表示为:

如果电磁转矩增量也满足线性化条件,即可表示为:ΔTe(p)=ke(p)Δδ5,则式(4)表示为:

式中,ke(p) —电磁转矩系数。
其次,同步频率λ下的相量形式为:

其中,km(jλ)—机械复转矩系数;
ke(jλ)—电气复转矩系数;
则有:

式中,k(jλ) —总复转矩系数;
K(λ) —弹性系数,与转角变化同相;
λD(λ)—阻尼系数,与转速变化同相。
根据式(7)可以判定轴系的稳定性,其稳定判据为:
当D(λ)|K(λ)=0>0 时, 轴 系 稳 定; 当D(λ)|K(λ)=0=0 时,为临界阻尼,临界稳定。当D(λ)|K(λ)=0<0 时,为负阻尼,轴系不稳定,将在频率λ下产生发散振荡。
对于系统中频率为λ的振荡分量,可以采用相量来表示前面的关系,即发动机电磁转矩增量的相量形式为 :

式中:Ke(λ) —电气弹性系数;
De(λ) —电气阻尼系数;
根据上述的稳定性判据时可知:当电磁转矩增量ΔTe(λ)和发电机角速度增量Δω5两者之间的相位在-90°~90°之间,即相位在右半平面时,对应的电气阻尼系数为正值,则发电机轴系稳定。反之,当相位在左半平面时,电气阻尼系数为负值,发电机轴系不稳定,将在次同步频率λ下产生发散振荡。
将式(8)变形,可以得到:

电气阻尼转矩系数De(λ)的值可以根据式(9)求解,即:
三、时域仿真实现步骤
根据定义可知,复转矩系数可以分为电气部分和机械部分,对于电气复转矩系数有两种方法可以求出,一种方法是可以通过系统的传递函数得到,另一种方法是通过曲线计算得到,而机械复转矩系数一般是利用系统的传递函数模型来计算,再根据稳定性判据来分析轴系是否稳定[4]。
由于次同步振荡频率远离工频,因此需要采用电磁暂态仿真软件PSCAD/EMTDC来计算复转矩系数。
PSCAD/EMTDC是一种时域仿真计算软件,其计算原理为:首先对电力系统中表示每个元件中机械和电气特性的微分方程,将其转化成差分方程,再利用节点分析方法联立,并采用固定计算时间步长来求解系统各运行变量在每一个计算时刻的瞬时值[6]。所采用的计算方法以隐式梯形积分法为基础,该方法同时包括了后退欧拉法的计算方法,两者结合达到了改善计算过程的数值稳定性的效果。
以计算电气阻尼转矩系数为例,来说明计算复转矩系数的时域计算方法。系统要求发电机轴系模型采用单刚体模型,而且电气部分采用完整的数学模型,具体时域仿真实现步骤具体如下[5]:
(1)利用电磁暂态仿真软件PSCAD/EMTDC建立系统的电磁暂态仿真模型,并且调试成功;
(2)当系统运行状态已经达到稳定后,在系统的发电机的转子上即PSCAD所建模型的输入端Tm施加一串频率为f0整数倍的小幅脉动激励转矩:
式中,φk—给系统施加脉动转矩的初相位;
Tk—给系统施加脉动转矩的幅值,Tk要求值较小,如果太大的话,就会导致系统非线性化,不满足假设条件。
(3)当待研究的系统运行状态再次达到稳定后,截取脉动转矩一个公共周期内的发电机电磁转矩Te和发动机角速度ω;

(5)根据式(10)可以得到激励频率下的电气阻尼转矩系数De(kf0),从而可以判断系统的稳定性。
下面针对上述5个步骤依次讨论和分析各步骤的具体执行。
四、系统仿真模型的建立
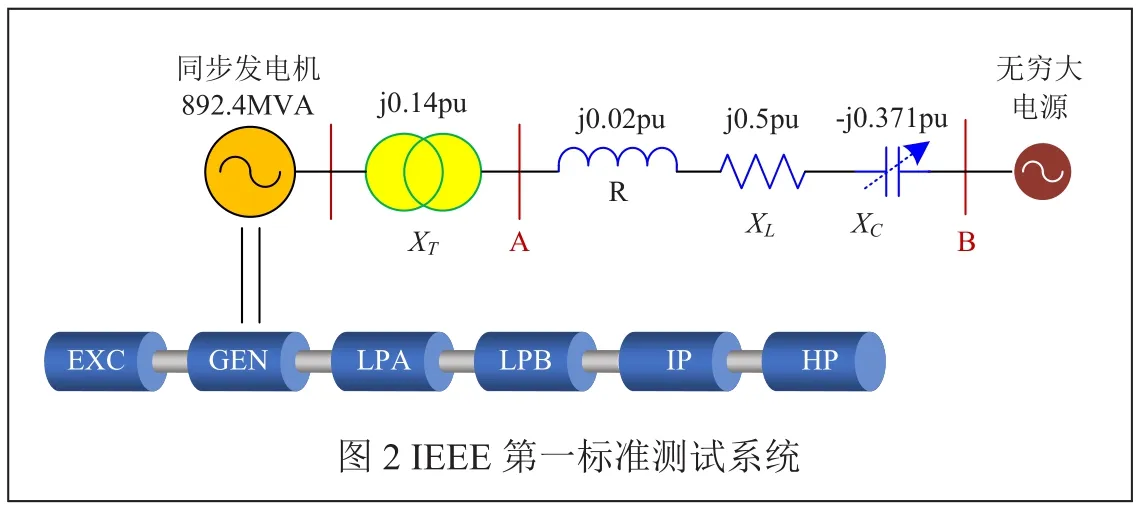
本文所研究的系统为IEEE第一标准测试系统,此系统主要用于次同步振荡的研究,如图2所示。系统主要以500kV的传输系统和892.4MVA的发电机组为基础,其模型轴系含有6个质量块,分别为励磁机(EXC)、发电机(GEN)、高压缸(HP)、中压缸(IP)、2个低压缸(LPA和LPB)。
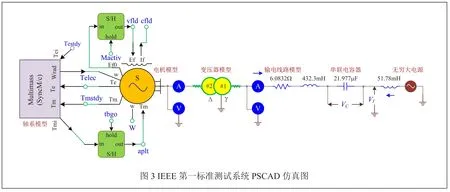
利用软件PSCAD/EMTDC中提供的标准模型库,建立如图3所示的IEEE第一标准测试系统模型,其中包括发电机、串联电容器、无穷大电源等模型,由于发电机轴系需要采用单刚体模型,发电机模型需要忽略多质量块。在建模过程中,其相关参数值见参考文献[6],建模完整图如图3。
五、扰动模型的建立
幅值的大小会影响仿真精度,系统对接入的脉动转矩幅值的要求较小,建议幅值为0.005~0.05之间,一般取0.01pu。如果幅值太大的话,就会破坏系统可线性化的前提条件。在加入脉动转矩的时候,需要考虑两个问题:
(1)如果每次只加入一个频率值的小值脉动转矩的话,既费时又统计困难;
(2)选择一次性加入多个频率不等的脉动转矩时,则会造成各频率值之间相互干扰的后果,如下式:

式中,f0—基频。
这里取f0=0.5Hz,因次同步振荡的频率最大为50Hz,所以k最大取值为100,这样加入脉动转矩的方法会导致叠加后的幅值较大,从而破坏了系统的可线性化性。
综合上述问题,本文提出的方法是:在对系统同时加入扰动转矩前,先对各个频率分量的转矩进行处理,即加上一个滞后相位如下:


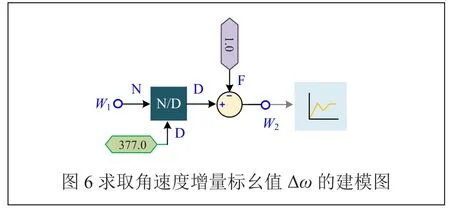
图4是未加滞后相位的扰动波形和加了滞后相位的扰动波形对比图。从图中我们可以看出,未加滞后相位时,幅值已经达到0.8pu,不满足要求。加了滞后相位之后,扰动量的幅值减小了4倍左右,并且没有破坏系统的可线性化条件。等式(13)中的n值取为5,这样叠加的扰动信号会比较平缓,不破坏系统的线性化条件。局部扰动模型细节见图5,图5中为扰动模型15Hz~16Hz的建模图,其模块中的三个输入分别为Phase(相位)、Mag(幅值)、Frep(频率)。
六、角速度增量标幺值Δω的求取
待系统运行状态再次稳定之后,截取发电机同一个公共周期电气转矩Te和发电机角速度ω。本文所分析的算例中,系统的采样频率为1000Hz,即采样公共周期为0.001s。软件PSCAD/EMTDC中输出的转速ω即为发电机角速度的真实值,得到真实值之后要转换成标幺值,再求取角速度增量的标幺值。在PSCAD上搭建模型求取Δω如图6。图6中,W1为输出的发电机角速度的真实值,377.0为基准角速度值(设置工频f=60Hz,则基准电气角频率为2πf=377rad/s ,产生发电机基准转速真实值也为377rad/s),W2即为角速度增量的标幺值Δω:

七、Fourier分解以及电气阻尼系数的求取
软件PSCAD中的在线FFT模块如图7,可以用于Te和ω的Fourier分解,更直观、实时地观测每个频率下幅值(A)和相位值(φ)。
以Δω为例,幅值相位建模如图7所示。FFT模块参数设置时,考虑到次同步振荡频率为5Hz~50Hz,所以参数设置的范围要涵盖次同步振荡频率范围,即基频f0参数设置为0.5Hz,对应的谐波数设置为127,则其频率范围为0Hz~63.5Hz,从0Hz~63.5Hz中选出满足次同步振荡的各个频率分量。图7中,输出W2Mag和输出W2Ph分别为各个频率(0Hz~63.5Hz)下相对应的幅值和相位值,图7中first-Ph、second-Ph、third-Ph分别是第一、二、三次谐波(即0Hz、0.5Hz、1Hz)对应的相位,这样可以清楚地知道某一谐波对应的相位输出图,幅值也是类似。



八、线路串补度对系统电气阻尼的分析研究
针对IEEE第一标准测试系统,分析研究串补度对电气阻尼的影响,固定其他参数不变的前提下,系统只改变串补电容值。取串补电容值分别为21.977μF、30.75μF、47.09μF,其所对应的串补度分别为74.1%、53%、34.6%,利用上述方法在待研发电机转子上,从而可以得到电气复转矩曲线。三个线路串补度(74.1%、53%、34.6%)对应的电气阻尼系数如图8所示。

由图8可见,当线路串补度为74.1%时,电气阻尼系数在11Hz~29Hz区间为负,在21Hz附近达到最小值,由于机械系统的正阻尼一般比较小,因此系统的谐振频率的总阻尼为负,则说明此系统存在次同步振荡不稳定问题。其它两种情况与此类似。
综合可以看出,当线路串补度分别为34.6%、53%、74.1%时,串补度越大,系统阻尼系数峰值所对应的电气频率越低,电气谐振点的负阻尼越大,则系统潜在发生次同步振荡的危险性也就越高;反之,线路的串补度越低,系统阻尼系数峰值所对应的电气谐振频率越高,系统的电气谐振点负阻尼越小,发生次同步振荡潜在的危险性相对越低。但是如果线路串补度越低的话传输能力就会越小,因此应综合考虑各方面的因素,选择最合适的线路串补度。
九、结论
本文基于复转矩系数法,运用电磁暂态仿真软件PSCAD/EMTDC对复转矩系数法进行了时域仿真实现,并作出一些改进,在实现过程中遇到的一些问题做了全面的分析并给出可参考的标准:
1、对于含串联电容补偿度的系统,系统接入脉动转矩幅值的要求较小,建议取0.01pu左右。
2、考虑到快速性和满足不破坏系统的线性化的假设条件下,在对系统同时加入扰动转矩前,对各个频率分量的转矩都加上一个滞后相位。
最后以IEEE第一标准测试系统为分析模型,求取电气复转矩曲线,分析了线路串补度对电气阻尼系数的影响,线路串补度的值与电气谐振频率成反比,即线路串补度越高,电气谐振频率会越低,对应的电气谐振点的负阻尼也就越大,系统潜在发生次同步振荡的危险性也就越高。
猜你喜欢
防爆电机(2022年3期)2022-06-17
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
船舶标准化工程师(2019年4期)2019-07-24
北方工业大学学报(2019年5期)2019-03-30
中学生数理化·高一版(2017年3期)2017-07-08
舰船科学技术(2016年1期)2016-02-27
火控雷达技术(2016年1期)2016-02-06
船海工程(2015年4期)2016-01-05
