高斯束叠前深度偏移在普光气田的应用研究
2018-11-14 07:50欧阳甜子
非常规油气 2018年5期
欧阳甜子
(中国石化中原油田分公司物探研究院,河南郑州 450000)
普光探区地处四川盆地东北部大巴山南麓,属复杂山地地表条件。该区地下构造复杂、断裂发育,主要目的层长兴—飞仙关组上覆膏盐岩体巨厚且厚度变化大,导致地震波场十分复杂,偏移成像困难。普光探区中深层以嘉陵江组上部至雷口坡组下部膏盐岩为上主滑脱层,以中下寒武纪统页岩为下主滑脱层,形成了上、中、下3个形态各异、构造特征不同的形变层[1]。受多期构造运动影响,形变层内部地层断裂扭曲严重,逆掩断裂带的存在使得高陡构造边界成像不清楚、褶皱强烈地区成像精度低、下伏构造成像困难、地层不易准确归位成像。
在复杂介质条件下,叠前深度偏移技术能提供很好的构造成像结果。高斯束偏移是一种准确、灵活、高效的深度域成像方法,其不但具有接近于波动方程偏移的成像精度,还保留了Kirchhoff偏移灵活、高效的特点以及对复杂地表条件良好的适应性[2]。它不仅具有时效短、效率高等特点,更具有复杂地区陡倾角成像方面的优势,其成像效果堪比单程波算子,同时还能克服单程波算子的倾角限制,满足复杂构造的成像精度。
本文提出了一种适用于普光气田等复杂地表的高斯束偏移方法,通过分层速度扫描、优选拾取参数和GAMMA体控制RMO深度误差曲线等方法,对速度模型进行了由浅至深的逐层网格层析反演,解决纵、横向构造变化对速度反演的影响,满足复杂构造速度反演精度,为高斯束叠前偏移成像提供了精确的深度域速度模型,最终的高斯束偏移成像结果在一定程度上改善了负向构造影响的问题,对低信噪比地区构造成像有明显提升,构造特征明显,负向构造影响减弱,具用较高的应用和推广价值。
1 高斯束偏移方法原理
Hill[3]给出了叠前高斯束偏移的方法。在共偏移距偏移中,通过对所有偏移距射线参数进行扫描找到使总走时虚部最小的炮点射线参数和检波点射线参数的组合。这种扫描可以在稀疏的偏移成像点网格上执行,然后将值再内插到较密集的成像网格点上,因此具有较高的计算效率和精度。
高斯束形式表达的偏移成像公式:
(1)
其中,C0是与高斯函数相关的系数:
Hale[4]对克希霍夫、倾斜叠加和高斯束3种偏移方法进行了详细比较,揭示了三者间的联系与区别,认为在时间域做高斯束偏移要比在频率域效率高,并给出了单个高斯束对地下成像贡献的时间域表达式:
(2)
(3)
其中,Bj(ω,px)为第j个高斯窗内通过倾斜叠加得到的频率域结果,其具体表达式为
(4)
式中,C为与高斯窗函数相关的振幅系数;Fj(ω,kx)为地震记录fj(x,t)的二维Fourier变换。
关于高斯窗函数的空间间隔与波束射线参数采样间隔的关系,Hill[3-6]和Hale均进行了详细的讨论,我们采用了Hill给出的参数选取准则[2]。
2 主要流程
高斯束偏移是一种优异的叠前深度偏移成像方法,它既保留了传统射线类处理方法运算效率高的优点,且具有接近波动方程类方法的成像精度[7]。本文总结了一种适用于普光气田复杂构造区域的高斯束叠前深度偏移处理流程(图1)。精准的速度模型是偏移成像成功的关键,为了提高速度反演的效果,在初始速度模型基础上加入地震层位约束,并在嘉陵江组和二叠系底加入了速度扫描,来解决目的层速度横向由高到低变化太快的问题。在速度反演的过程中,对剩余曲率精确的拾取是速度反演的最重要环节,在拾取过程中,往往由于参数选取不当,或者远偏移距拾取弯曲等问题造成反演失败,为了保证反演的效果,本文采取了叠前去噪的方法来提高道集的信噪比,便于拾取,优选拾取参数,并生成了GAMMA体控制拾取结果,确保速度反演正确有效进行。
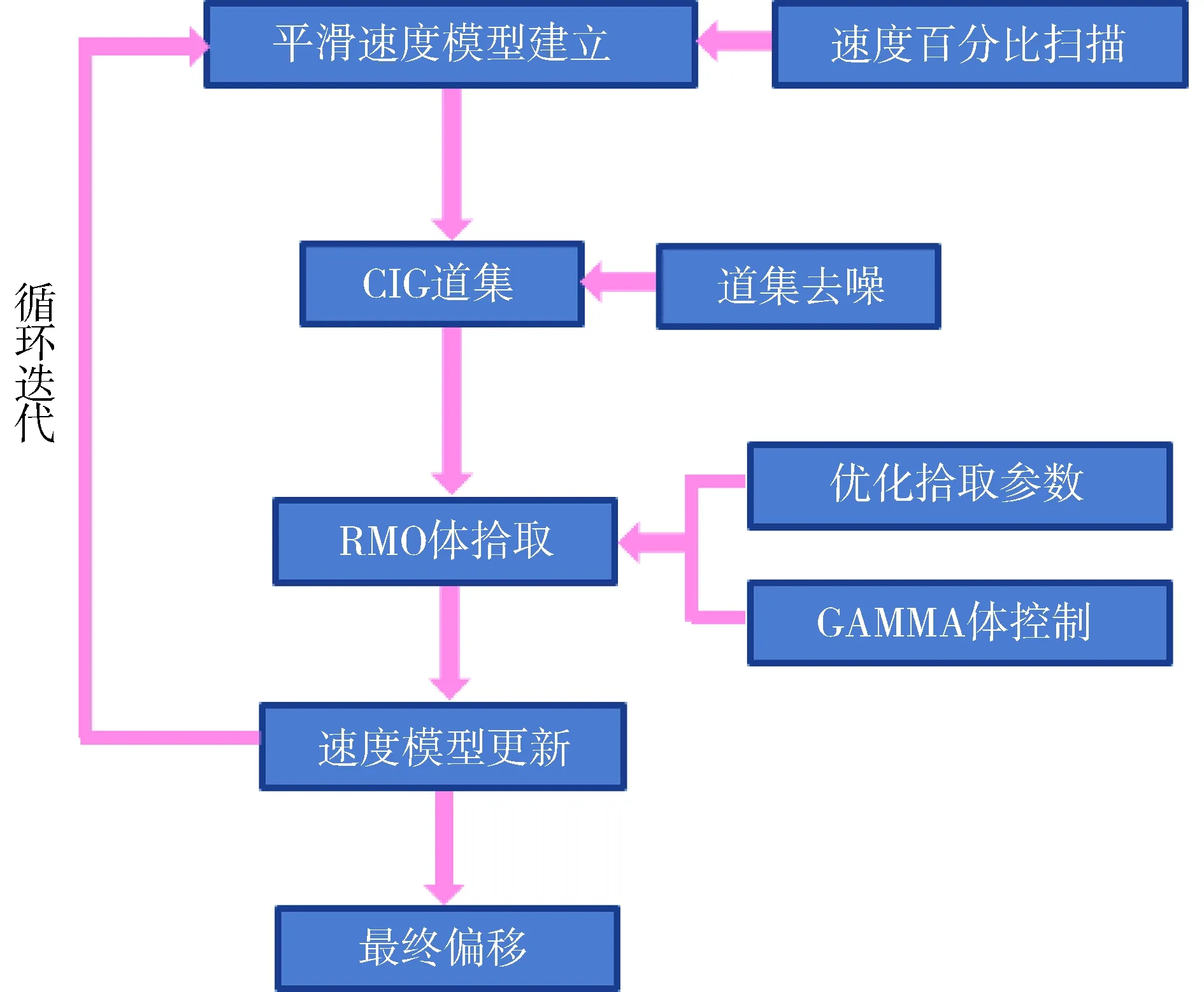
图1 高斯束叠前深度偏移处理流程Fig.1 Gaussian beam prestack depth migration processing
2.1 初始速度的建立
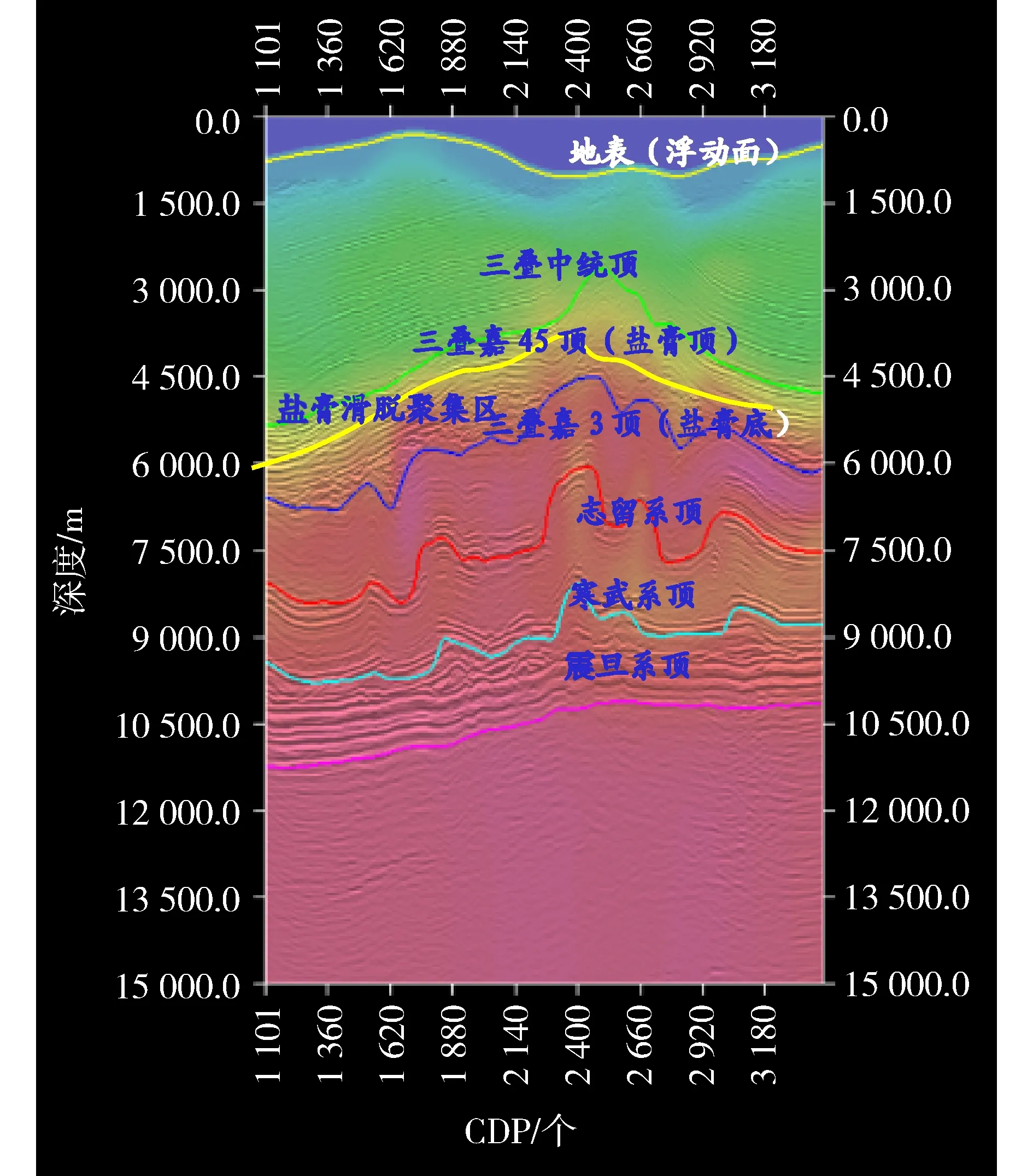
图2 深度域初始速度模型Fig.2 The initial velocity model of the depth domain
在叠前深度偏移处理中,偏移成像的效果在很大程度上依赖于层速度模型的正确性[8-9],成功的关键是建立一个精确的深度域速度模型。如图2所示,为本工区建立的初始速度模型,为了求取深度域的层速度体,把均方根速度场做地学统计法的平滑,通过DIX公式把均方根速度转换成层速度,把时间域的层速度转化成深度域的层速度,通过内插和外推,建立深度域的层速度体,并在此基础上加入地质层位控制。初始速度模型是由时间偏移的速度转化而来,由于深度域偏移对速度更加敏感,所以初始速度模型不满足深度域偏移的精度和要求,需要在此基础上进行多次更新,才能得到满足深度域成像的速度模型。
依据本区的构造特点,嘉陵江组厚度变化大的膏岩层对岩下地层成像影响较大,尤其是在厚度突变点处对下伏地层成像有较大干扰,因此可以在纵向沿海相嘉陵江组膏岩底边界首先获取准确的膏岩层速度,解决膏岩层对岩下地层成像的影响。
综合以上分析,在第一轮速度更新以后对速度体加入两套层位:三叠系嘉3顶(盐膏底)、寒武系顶,以这两套层位为目的层,保持其他层位的速度不变,并在此基础上对这两个层位进行94%、96%、98%、100%的速度扫描。用不同百分比的速度做目标线偏移,然后跟第一轮速度分析的结果进行对比,选择一个比较接近真实速度场的速度体加密偏移体,为速度更新做准备。目标线偏移结果表明,速度过低不利于偏移成像,速度过高偏移无法到达准确的位置,因此本文选取96%的速度体作为第二轮速度更新的初始速度。如图3为96%的速度模型。
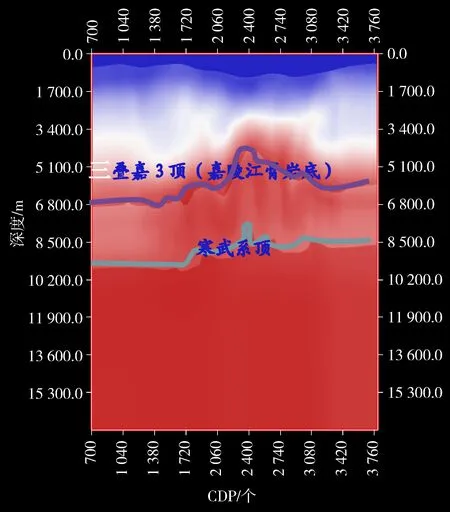
图3 96%的速度模型Fig.3 Model of 96% velocity
2.2 叠前去噪
高信噪比地震资料是做好叠前偏移的基础[10]。叠前偏移对噪声有放大作用,因此要做好叠前去噪处理,尽可能提高信噪比。本区普遍存在比较强的面波干扰,采用分频衰减方法,尽可能减少有效成分损失;采用地表一致性区域异常振幅衰减对炮记录中存在的低频大脉冲或高频尖脉冲振幅异常现象进行压制,消除叠前道集中存在的较强干扰波。如图4为偏移道集去噪前后对比,从图中可以看出,偏移道集去噪以后,信噪比明显提高。
高质量的道集数据是做好速度反演的前提和基础。由于信噪比的提高,使得RMO曲线的拾取更加准确有效。如图5为偏移道集去噪前后拾取情况的对比图,偏移道集去噪前的拾取(a),RMO曲线表现出弯曲、抖动的情况,这在速度反演的过程中只会起到负面作用,影响最终偏移效果;偏移道集去噪后的拾取(b),同相轴更易于辨认,RMO曲线的拾取准确度和精度提高。因此叠前去噪是偏移速度正确反演的前提和保障,是速度反演的根本和基础。
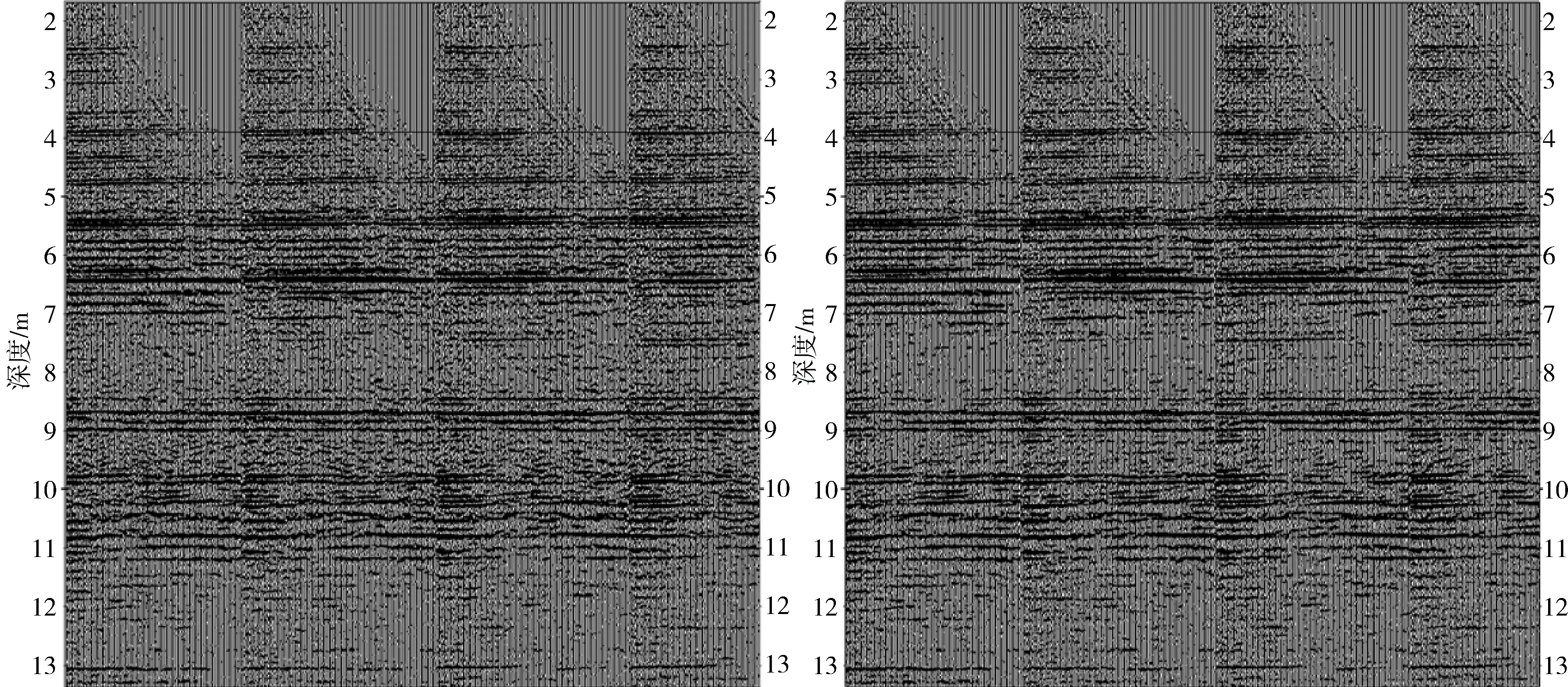
图4 偏移道集去噪前(左)后(右)对比Fig.4 The offset gathers denoising contrast before (left) and after (right)
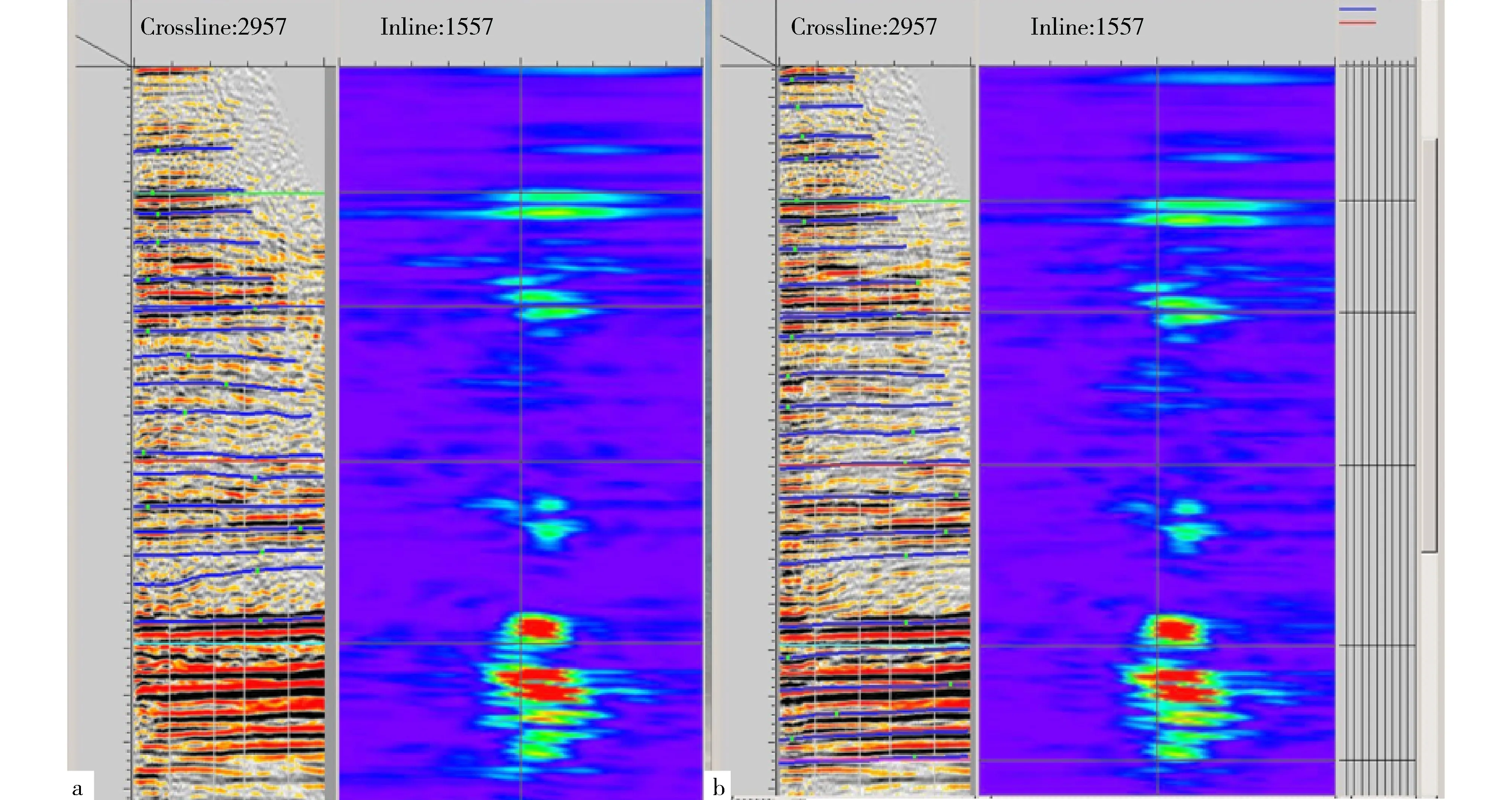
图5 道集去噪前(a)后(b)拾取情况Fig.5 The offset gathers denoising picking contrast before (a) and after (b)
2.3 速度模型更新
2.3.1 优化拾取参数
在叠前去噪后的偏移道集上进行RMO曲线的拾取,拾取参数的选择也至关重要,不合适的拾取参数不仅会影响拾取的效率,也会增加反演失败的风险。本文选择了几个比较重要的参数进行反复的试验和摸索,最终拾取的效果有大幅提高,为速度的反演提供了很好的技术保障。
振幅门槛值:描述拾取的最大能量值。振幅门槛值越大,拾取的同相轴的能量越强。本文采用15%门槛值,如果门槛值过大,只会拾取能量强的同向轴从而漏掉能量弱的同向轴;门槛值过小,拾取的同向轴过多,可能拾取到噪声,从而影响反演效果。拾取的原则是有效轴都拾取上而不要引入噪声。
Max Number:拾取的最大的数值。本文采用的200,这个数值指的是RMO曲线的数值,200或100均可。
Separation:拾取的RMO曲线的间隔。本文采用的100,这个间隔如果过小,密度太大,拾取太多没有必要;间隔如果太大,可能会漏掉有效的同向轴。
Gamma Limit:GAMMA体的范围,用于控制拾取的RMO体。本文采用的0.7~1.3(系统默认参数)。
如图6为优选拾取参数以后RMO曲线的拾取情况,从图中可以看出优选拾取参数前(a),RMO曲线的拾取过于集中,中间有效的同向轴没有拾取上,优选了拾取参数后(b),RMO曲线的分布更加均匀,对同向轴的拾取更加准确有效。
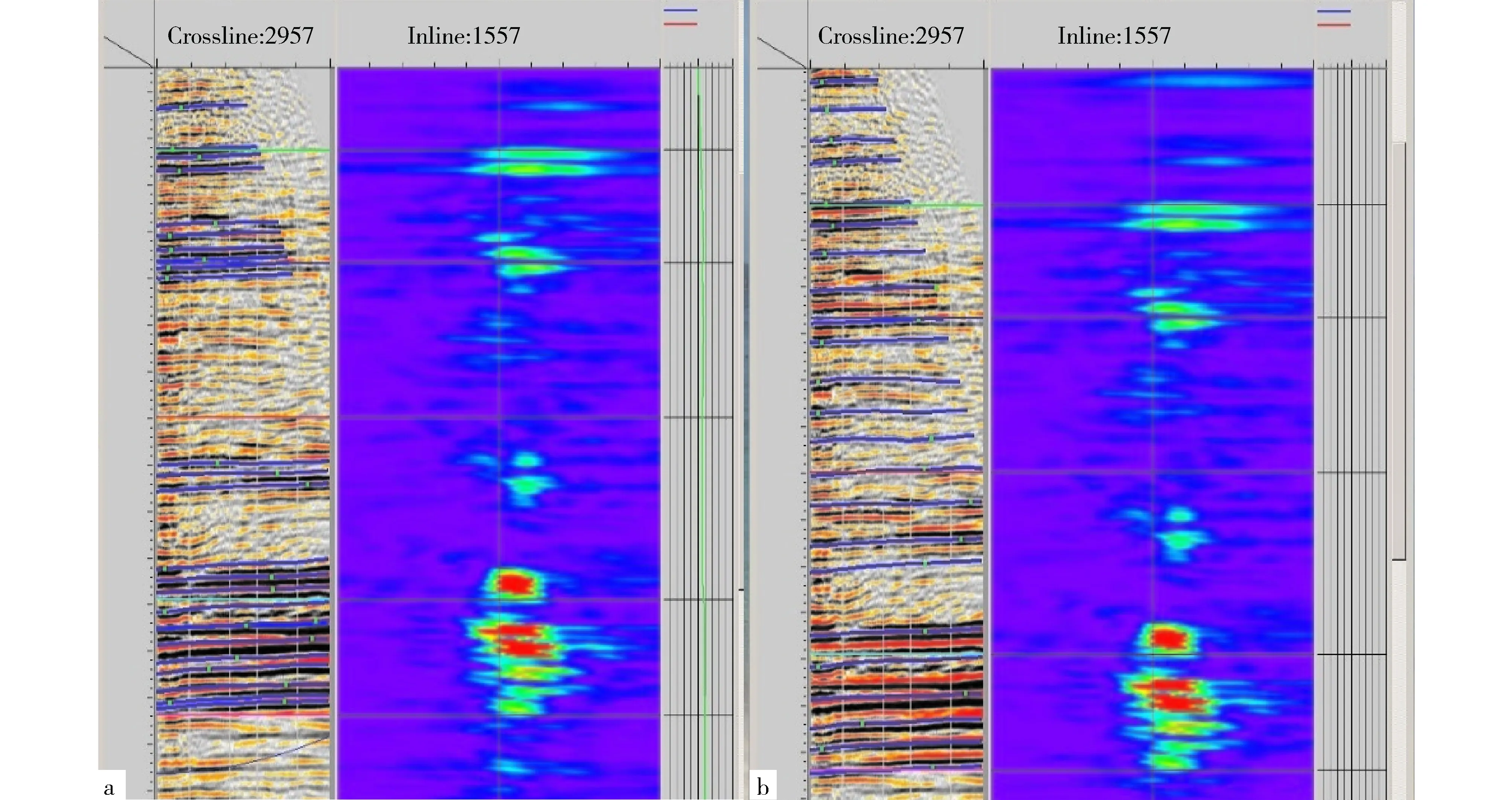
图6 优选拾取参数前(a)后(b)RMO曲线的拾取情况Fig.6 Optimizing parameters on picking RMO curves contrast before(a) and after(b)
2.3.2 RMO深度误差曲线
RMO曲线描述从零偏移距到最大偏移距深度的误差,这个误差描述出这个点的位置与RMO曲线模拟抛物线的一个形态。形成角度体、能量体、剩余曲率体,做多偏移距层析成像反演,把原来没拉平的CRP道集拉平,在拉平的过程中做射线追踪、计算新的旅行时,计算模型的准确位置,反复迭代,保证CRP道集拉平。
输入建好的初始速度模型,在地震层位约束的前提下分构造区域分别定义不同的拾取参数,做RMO体的拾取,以适应复杂构造带拾取的需求。根据拾取文件得到新的炮检点偏移距、方位角、旅行时等信息进行反演,在RMO曲线趋于最小化时,输出最终的速度模型,做最终的高斯束叠前深度偏移。
由于RMO曲线在拾取过程中易出现抖动和远偏移距扭曲等现象,需要利用GAMMA体去控制RMO曲线拾取的准确性。拾取文件先创建GAMMA体,得到GAMMA体文件以后,再用GAMMA体反推拾取文件以达到RMO曲线平滑的目的,确保速度模型更新的效果。如图7为GAMMA体控制前后的RMO曲线对比图,(a)为未用GAMMA体控制的RMO曲线,远偏移距抖动或弯曲的现象比较明显;(b)为用GAMMA体控制以后的拾取情况,可以看出GAMMA体控制后的RMO曲线明显平滑,远偏移距弯曲的现象得到明显改善。
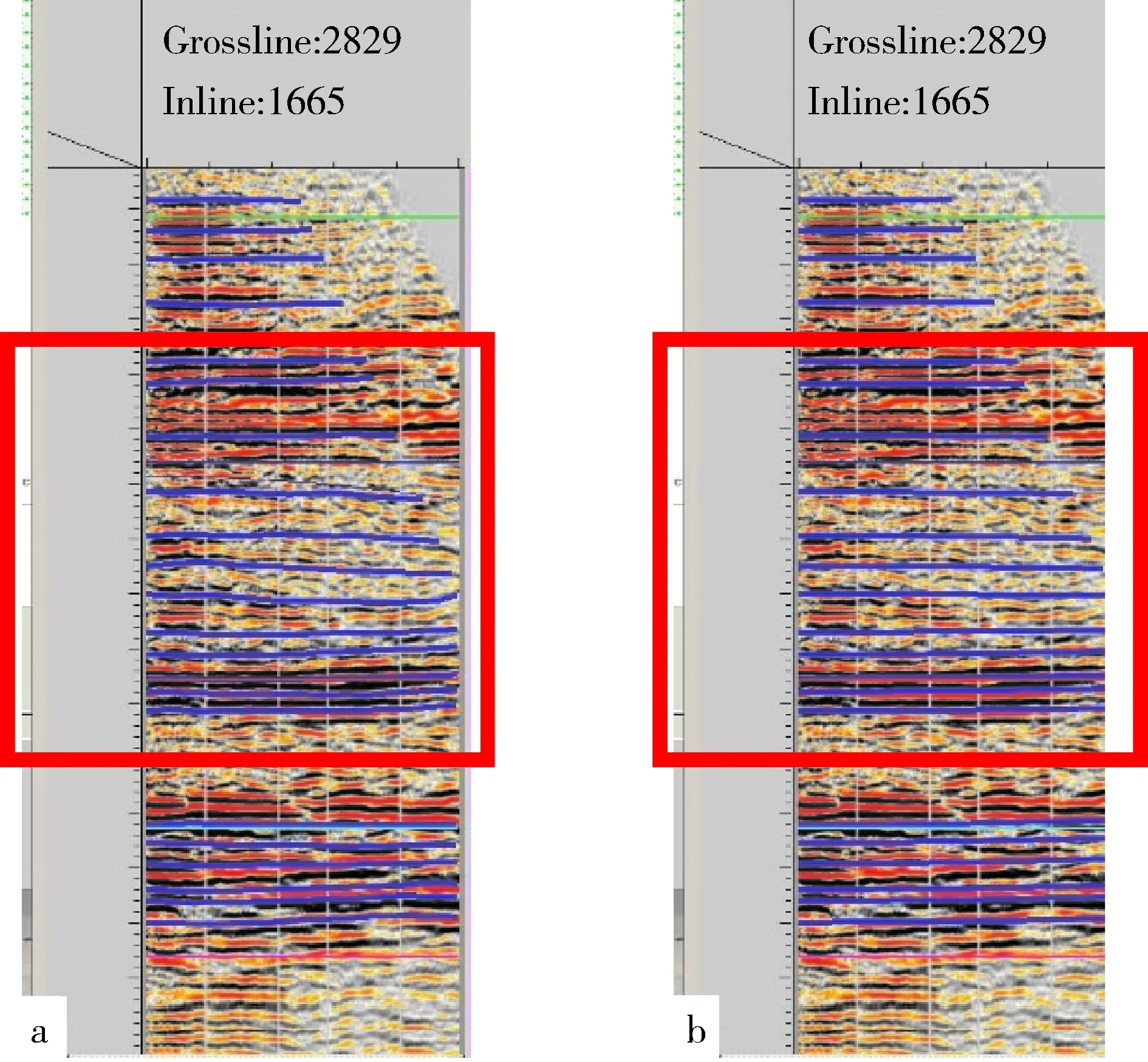
图7 GAMMA控制前(a)后(b)的RMO曲线对比Fig.7 The comparison of RMO curves before and after the control of GAMMA
初始速度模型(图2)经过三轮速度模型的更新,现初始速度模型较平滑,由浅至深速度值平稳增加,横向上没有剧烈的速度变化,整体没有体现出膏岩层、碳酸盐储层和复杂构造对速度的影响。图8为3次速度更新以后最终的深度域速度模型,可以看出速度不再是由浅至深逐渐增大的趋势,而是由嘉陵江组膏岩层开始速度增加明显,嘉陵江组下出现高速地层,在地质分析中对应海相碳酸盐岩地层;在横向上3次更新后深度域层速度模型与地层构造也显示出了较高的吻合性[1]。
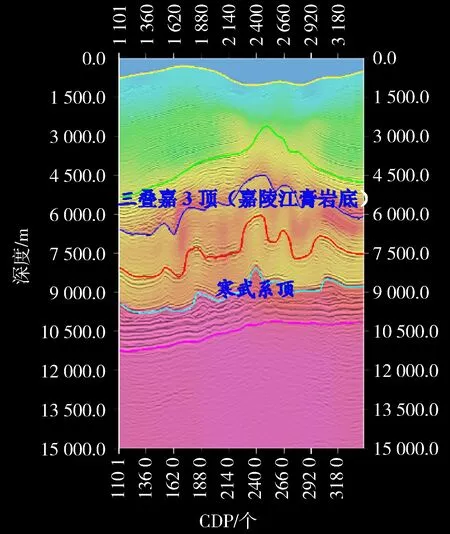
图8 深度偏移最终速度模型Fig.8 Depth migration final velocity model
3 应用效果分析
将高斯束叠前深度偏移算法应用于普光地区的实际资料成像处理。研究区地质条件复杂,速度横向变化剧烈,存在高陡构造,而且原始资料品质差,深层高速岩体存在,导致盐下成像困难。经过3次速度模型更新以后,得到了比较精准的速度模型,最终的高斯束偏移成像较好地解决了高陡倾角成像和盐下成像问题,实现了盐下断层的准确归位,改善了对弱反射能量的成像,更易于进行构造解释和异常体识别;对断背斜成像更加合理,断点清晰,盐下背斜成像精度大大提高,并与波动方程偏移精度相当,而且在时效上减少了偏移时间,效率高。如图9和图10所示,高斯束偏移成像的盐下构造成像准确,绕射波收敛,同相轴连续稳定。如图11高斯束与波动方程的局部对比可以看出,高斯束偏移的盐包络成像更加准确清晰,干扰波明显减少,易于构造解释。如图12,波动方程的绕射波未收敛,曲界面成像不足,高斯束偏移在陡倾角成像上有明显优势。
高斯束深度偏移在普光探区的应用,改善普光盐下构造成像,提升海相飞仙关、长兴组的成像质量,可以有效降低勘探风险,同时也会直接或间接地给普光气田带来一定经济效益,该技术也可以进一步在东濮地区推广应用。
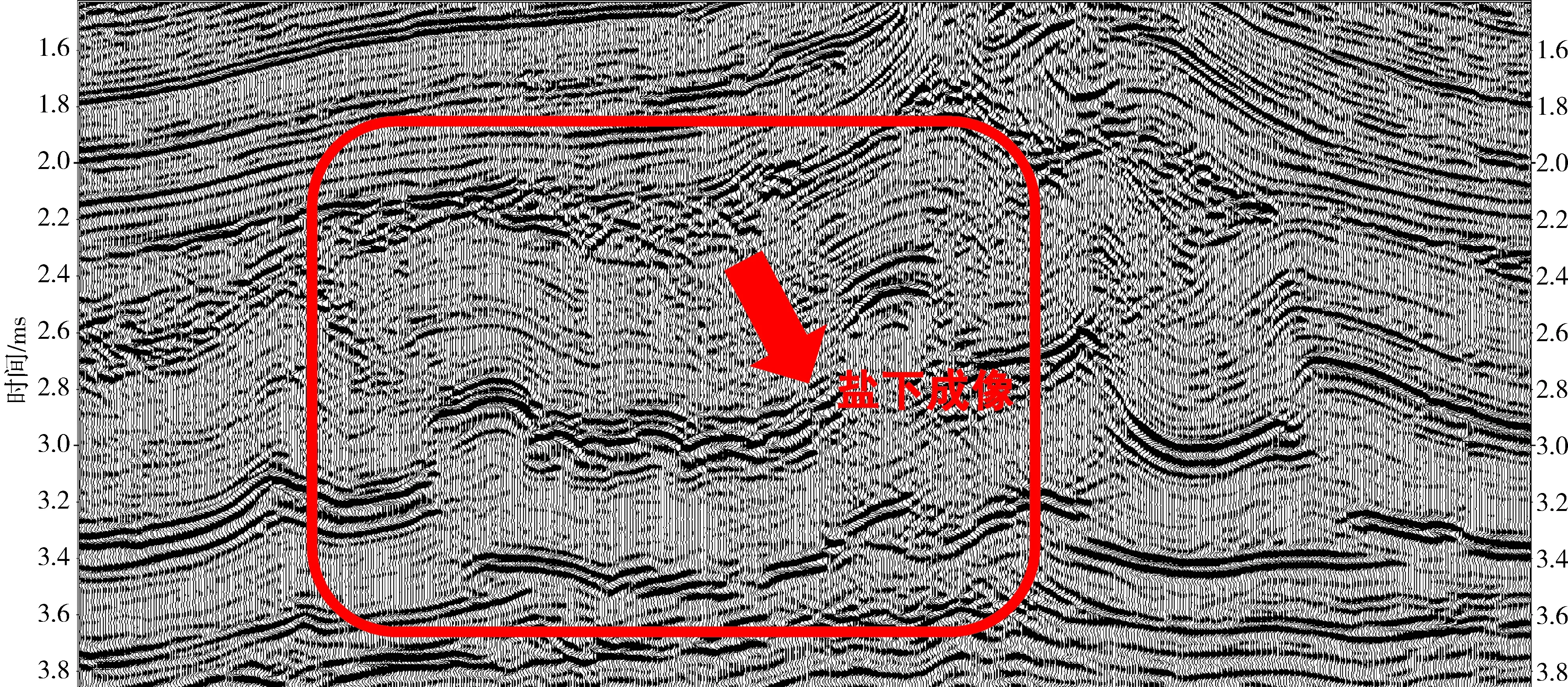
图9 波动方程偏移1517线Fig.9 Wave equation migration of line 1517
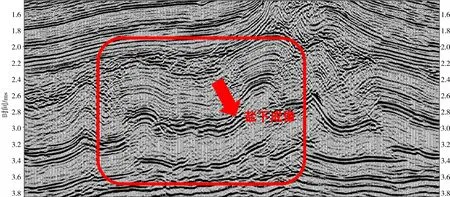
图10 高斯束偏移1517线Fig.10 Gaussian beam migration of line 1517
4 结束语
(1)叠前时间成像方法在油气田勘探中一直处于主要地位,目前油田勘探面临的复杂地下地质条件对地震成像方法有进一步的要求,叠前时间成像方法对如高陡构造、逆掩地层、膏岩地层、岩性横向变化大等情况存在应用上的不足。叠前深度偏移能较好地解决实际勘探中复杂构造成像和岩性成像的问题。高斯束偏移方法保留了射线方法灵活高效、无倾角限制的优势,同时克服了焦散、阴影区、多值走时等问题。
(2)准确的深度域速度模型是保证叠前深度偏移成像质量的关键,其建模过程中初始速度模型是基础,在速度模型更新中RMO体的拾取是非常重要的环节,高质量的叠前数据是做好叠前深度偏移的前提和保证。
(3)普光探区高斯束深度偏移数据验证了高斯束偏移方法在陡倾角构造、低信噪比资料成像方面的优势。高斯束深度偏移技术能适应速度横向变化大的复杂断裂区,改善复杂陡倾角断裂和地层的成像效果,使复杂小断块区断裂位置更加清晰可靠。
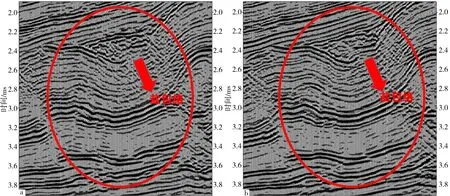
图11 高斯束偏移(b)与波动方程偏移(a)的叠加对比(1677线)Fig.11 Comparison of Gaussian beam migration (b) and wave equation migration (a) (line 1677)
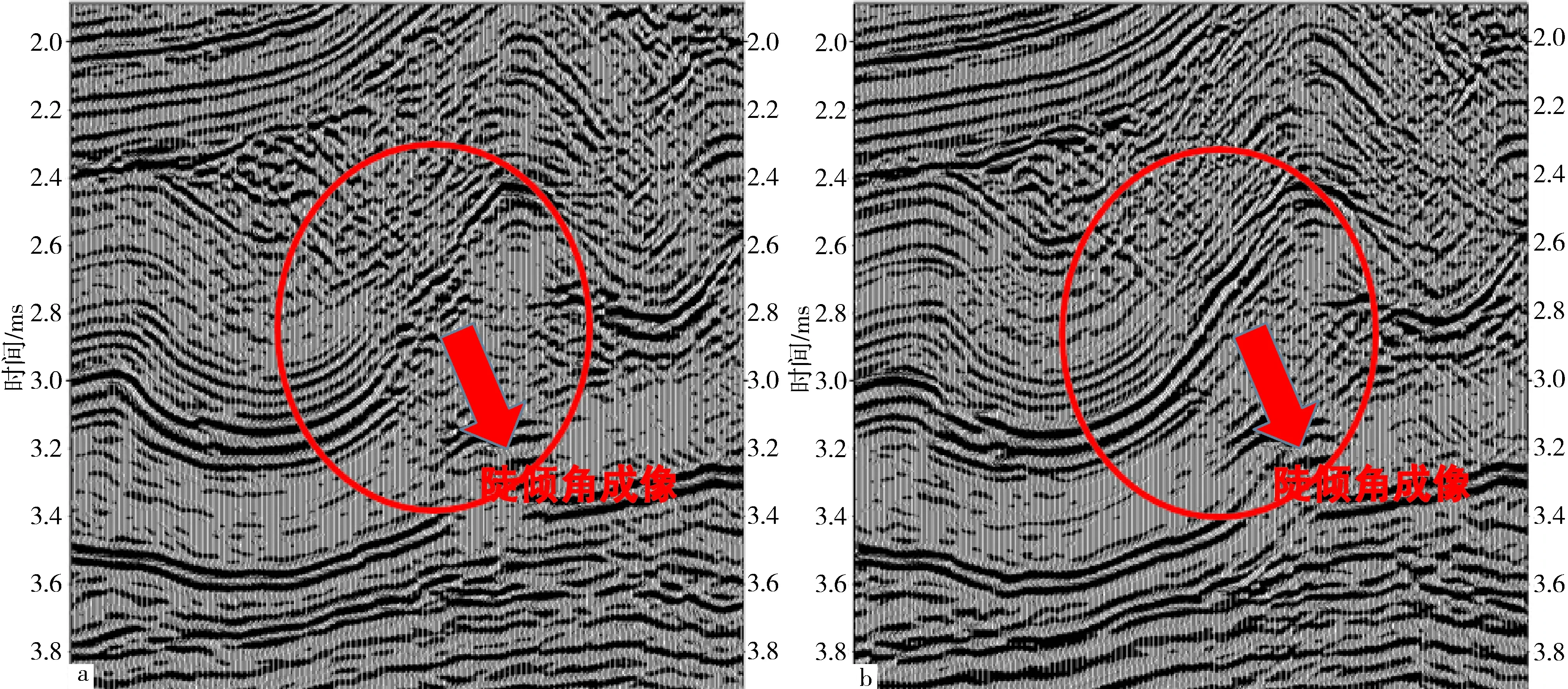
图12 高斯束偏移(b)与波动方程偏移(a)的叠加对比(1797线)Fig.12 Comparison of Gaussian beam migration (b) and wave equation migration (a) (line 1797)
猜你喜欢
中等数学(2022年5期)2022-08-29
石油化工管理干部学院学报(2021年5期)2021-08-06
石油化工建设(2019年4期)2019-10-10
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
重庆科技学院学报(自然科学版)(2017年6期)2018-01-10
信息记录材料(2016年4期)2016-03-11
电影故事(2015年16期)2015-07-14
新疆石油地质(2015年2期)2015-02-28
物探化探计算技术(2015年2期)2015-02-28