
基于改进全桥驱动电路的电机控制器设计
2018-11-14 08:53刘国松万彦超
重庆理工大学学报(自然科学) 2018年10期
刘国松,唐 帅,万彦超
(1.中国人民解放军陆军勤务学院 军事设施系, 重庆 401331; 2.军事科学院 系统工程研究院 军事新能源技术研究所, 北京 100091; 3.中国人民解放军63926部队, 北京 100192)
随着物联网的快速发展,人工智能机器人的研发与应用已成为一个研究热点。电机作为机器人的“关节”,是机器人能够自由运动的关键部件,而电机控制器又是连接电机和主控制芯片的关键部件。一个好的电机控制器能充分发挥电机的性能,同时能保护电机,延长电机的寿命。现有的控制器驱动电路存在电流不均、开关时间不一等问题[1-4]。本文采用改进的全桥驱动电路,对桥臂上开关统一采用N型场效应管,通过改变算法达到同样的控制效果,同时解决了电流不均、开关时间不一等问题。
1 电机控制器的基本结构
电机控制器[5]由通讯模块、控制模块、驱动模块、电源模块和检测模块5个模块组成,电机及各模块之间的关系如图 1所示。驱动模块控制电机的正反转及电机转速的调节;控制模块接收来自通讯模块的控制信号及检测模块的检测信号,并向驱动模块发送控制信号以实现对电机的控制及纠正,同时将信息反馈给通讯终端;电源模块则用于保证整个控制器及电机的稳定供电。

图1 电机控制器模块构成
根据电机控制器模块功能不同,将控制器的驱动模块和控制模块分别置于PCB板两端,并增加地层和电源层,有效地隔离了驱动模块中的强电流对控制信号的干扰。控制芯片则采用独立的电源芯片(HDW-24S05)供电。该芯片是一款高性能的电源芯片,输出电压精度为±1%,输入电压幅值为18~36 V。同时,该芯片具有电磁兼容的特性,能在强磁环境下工作。另外,由于其采用一体化灌封,使其具有防腐、防潮、防震性能以及良好的导热性能。控制芯片采用高性能的TMS320F2808[6]控制芯片。该芯片为专门的数字信号处理器,主要有如下特性:高性能CMOS技术、32位CUP、多达16个脉宽调制(PWM)输出、多达2个正交编码器接口、多达2个控制器局域网 (CAN) 模块、12位模数转换器(ADC),16个通道。最终设计的PCB版实物如图2所示。
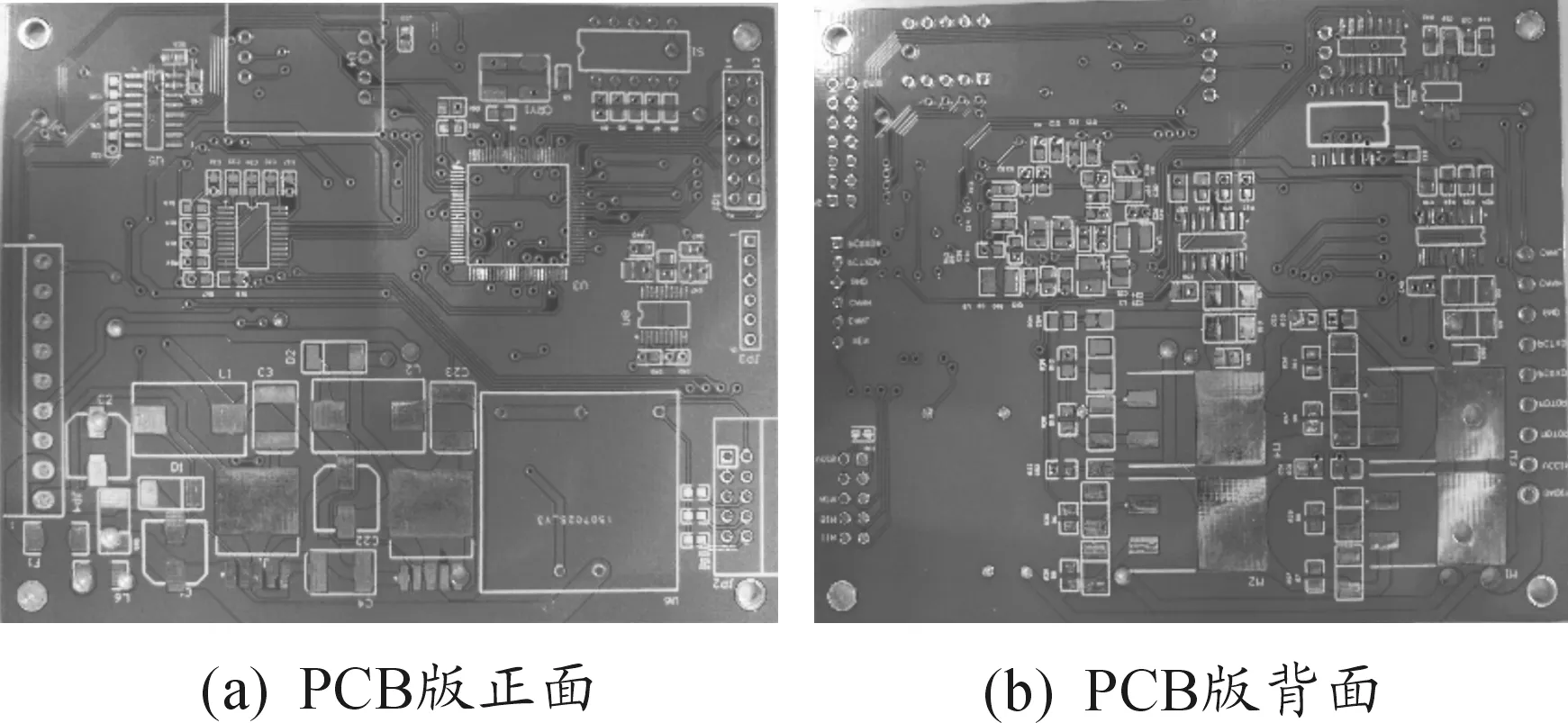
图2 PCB板实物
2 改进的全桥控制电路设计
典型全桥电路[7]如图3所示。它由2个P型场效应管Q1、Q2与2个N型场效应管Q3、Q4组成,所以又称P-NMOS 管H桥。桥臂上的4个场效应管相当于4个开关。通过控制开关的通断,可以实现对电机供电以及供电方向的控制。当Q2、Q3导通,Q1、Q4断开时,电机将沿箭头所指方向转动,通过调节Q2、Q3的导通与关断,可以实现对电机速度的控制;相反,当Q1、Q4导通,Q2、Q3断开时,电机将沿箭头所指方向反方向转动,通过调节Q1、Q4的导通与关断,同样可以实现对电机速度的控制。
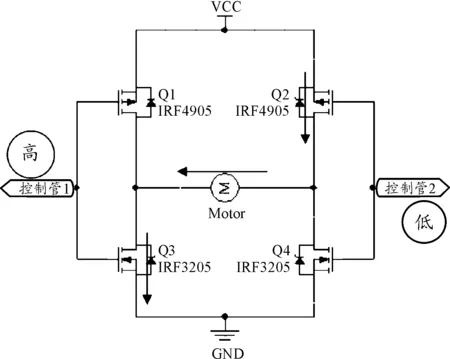
图3 典型H桥电路
但是,这种P-NMOS管H桥同时存在P型场效应管和N型场效应管[8],而这两种场效应管在性能上不可避免地存在着差异。因此,驱动电路中必然存在着电流不均、开关时间不一等不利影响。为了提高控制的精度,消除不同场效应管带来的影响,本设计对P-NMOS管H桥进行了改进:4个场效应管均采用N型场效应管。由于采用完全相同的场效应管,因此每个桥臂在相同电压下允许流过的电流将完全一致,同时开关时间也将相同,从而消除了不同场效应管间带来的误差。改进的全桥电路如图4所示。

图4 全桥驱动模块
全桥驱动模块采用4N-MOS管全桥驱动,驱动电压为12 V,同时加入了IR21834芯片,可将控制信号的5 V电压升到12 V。模块还加入了电流传感器芯片ACS712。该芯片由Allegro公司推出,是一种线性电流传感器,它内部有精确的低偏置线性霍尔传感器,能输出并检测到与直流或者交流电流成比例的电压。同时,该芯片带宽为50 kHz,总输出误差最大为4%,具有噪声低、响应时间快(对应步进输入电流,输出上升时间为5 s)、输出灵敏度高(66~185 mV/A)、使用方便、性价比高、绝缘电压高等特点。由于驱动电路采用4个N型场效应管,因此控制算法将与典型的全桥驱动电路不同,所以应重新设计控制算法。
3 控制算法设计
控制算法考虑流过电机的电流、电机的转速以及电机当前的位置3个因素的影响,设计了三环控制系统。
整个控制流程如图5所示。控制器包含位置环、速度环、电流环,后一环嵌入前一环。由于电流的响应急快,同时对电流的检测是评断电机是否过流的安全保证,因此将其作为最内环控制。速度环响应快于位置环,因此将速度环作为中间环,将位置环作为最外环。无论是位置环、速度环还是电流环,均采用PID控制算法[9-10],前一环的输出结果作为下一环的输入,形成相互嵌套的三环控制系统[11]。相应的控制程序流程如图6所示,左侧为主程序流程,右侧为调用的子程序。

图5 控制流程

图6 控制程序流程
4 实验测试与分析
实验采用90 W的带减速箱的Maxon电机进行。控制器实物如图7所示。测试实验共分为启动实验、轨跟随实验、堵转实验3部分,分别用于测试电机的启动响应、跟随性能和过流保护性能。

图7 控制器实物
3种实验均记录了电机的转速变化规律和电流变化规律。实验结果见图8~17。

图8 启动测试的转速曲线

图9 启动测试的电流曲线
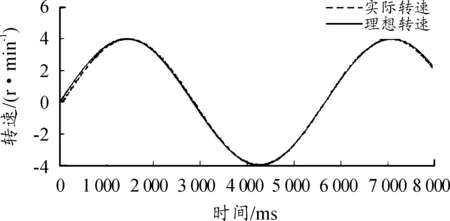
图10 正弦跟随的转速曲线

图11 正弦跟随的电流曲线

图12 方波跟随的转速曲线

图13 方波跟随的电流曲线

图14 未加限流条件下堵转测试的转速曲线

图15 未加限流条件下堵转测试的电流曲线

图16 加限流条件下堵转测试的转速曲线

图17 加限流条件下堵转测试的电流曲线
启动实验结果图8、图9所示,启动响应时间在0.1 s左右,响应较快。速度启动平滑,启动后能够稳定在最大速度值上,且误差小于5%,符合设计要求。由于加入了电流环,电流在启动时没有产生过流现象。跟随实验结果如图10~13所示,电机的速度能很好地跟随设定的速度,能满足设计要求。同时,电流能够维持在一个较低的值,没有突变的发生。电流在速度反向时会产生较小的波峰,但在误差允许范围内。电机堵转实验结果如图14~17所示,在未加过流保护的情况下,电流过流值达60 mA;在加入过流保护后,电流值被限定在30 mA以内,平均值在20 mA左右,在电机突然堵转的情况下实现了过流保护。
5 结束语
本文设计的电机控制器,针对驱动电路存在电流不均、开关时间不一等问题,采用改进的全桥控制电路,有效解决了这一问题,并设计了相应的控制算法。通过实验验证了电机能够控制启动电流,达到安全、稳定、快速的启动效果,同时具有良好的跟随性能和过流保护能力。该控制器能还可应用于机器人领域。
猜你喜欢
科技资讯(2022年21期)2022-10-30
纺织科学研究(2020年1期)2020-05-21
电子制作(2018年23期)2018-12-26
制造技术与机床(2017年6期)2018-01-19
电测与仪表(2016年7期)2016-04-12
电测与仪表(2016年4期)2016-04-11
通信电源技术(2016年5期)2016-03-22
铁道科学与工程学报(2015年4期)2015-12-24
西部广播电视(2015年21期)2015-10-18
舰船科学技术(2015年8期)2015-02-27
