DC/DC变换器的预测函数控制
2018-11-12 02:32吴津庆葛芦生陈宗祥丁烨
常州工学院学报 2018年4期
吴津庆,葛芦生,陈宗祥,丁烨
(安徽工业大学电气与信息工程学院,安徽 马鞍山 243032)
DC/DC变换器应用广泛。如何运用先进的控制技术提高其稳态性能和动态调节性能,越来越受到学者们的关注[1-5]。模型预测控制(model predictive control, MPC)作为一种先进控制技术,目前已应用到DC/DC变换器的控制中[3-5]。预测函数控制(predictive functional control, PFC)是第三代模型预测控制算法,它将控制输入结构化,不仅克服了模型预测控制存在的控制输入不规律的问题,而且有效减少了在线计算量,提高了响应速度。文献[6]采用PFC-PID串级控制策略来控制主汽温控系统,提高了系统的鲁棒性。这种方法简单,而且具有实际应用价值。文献[7]将预测函数控制应用于并联机器人控制,并与计算转矩控制(computed torque control, CTC)和PID算法进行了对比,发现预测函数控制具有更好的跟踪性能和抗干扰性。
由于预测函数控制具有实时计算量小、鲁棒性强的特点,因此适用于快速控制系统[8]。鉴于此,本文设计了基于预测函数控制的Buck变换器,采用状态空间平均法建立预测模型,并进行反馈校正调节,通过优化二次型性能指标推导出占空比的表达式。最后通过仿真验证了该Buck变换器具有良好的稳态精度和较快的动态响应。
1 预测函数控制基本原理
1.1 控制变量
预测函数控制不仅具有模型预测控制的三大特征:预测模型、滚动优化、反馈校正,还有其独特的优点。PFC算法把每个时刻的控制输入看成是一系列已知基函数的线性组合:
(1)
式中:u(k+i)为(k+i)时刻的控制输入;P为预测优化时域长度;N为基函数的个数,N≤P;gkj(i)为基函数在t=iTS时刻的值,其中TS为采样周期;μj(k)为基函数的线性组合系数。由于基函数是已知的,对控制输入量的计算就转化成了对线性组合系数的计算。基函数可以根据被控对象的特性和设定值进行选择,通常选择阶跃函数、斜坡函数、指数函数等。
1.2 预测模型
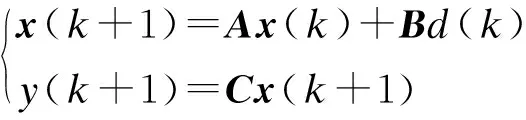
PFC算法的预测模型采用线性离散状态空间描述方程的形式:
(2)
式中:Xm是预测模型的状态变量;ym为预测模型的输出;u为系统的控制输入;A、B、C是相应维数的矩阵或者向量。
1.3 参考轨迹
在实际控制过程中,为了让系统的输出值平滑地达到设定值,从而避免大幅度超调或者振荡现象,可以规定一条渐趋于设定值的曲线,即参考轨迹。参考轨迹可以选择多种形式,对于渐近稳定系统,通常采用一阶指数的形式:
yr(k+i)=c(k+i)-βi(c(k)-y(k))
i=1,2,…,P
(3)
1.4 性能指标
预测函数控制的优化是对有限区域进行优化,通过时间的推移滚动式地进行下去。通常为使优化点上的预测值与参考轨迹值差值的平方和最小,优化的性能指标选取为

ri[u(k+i-1)]2}
(4)
式中:qi为差值的权重系数;ri为控制输入的权重系数;yp是校正后的模型预测输出值。
yp(k+i)=ym(k+i)+hie(k)i=1,2,…,P
(5)
式中,hi为误差系数,当模型存在误差时,可以调节hi使输出达到设定值;e为预测误差,可取为
e(k)=y(k)-ym(k)
(6)
为使式(4)能够取得最小值,令
(7)
式中,μ(k)=[μ1(k),μ2(k),…,μN(k)]T。对式(7)求解,可以得到基函数的线性组合系数,从而推导出控制输入的表达式。
2 Buck变换器的PFC控制器设计
2.1 Buck变换器数学模型
Buck变换器采用同步整流的方式,其拓扑结构如图1所示。
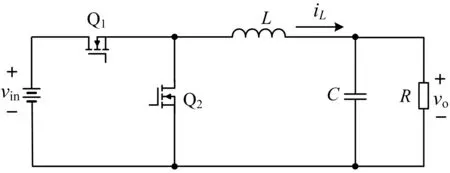
图1 同步整流Buck变换器拓扑结构
图1中,Q1为主开关管;Q2为同步整流管;L为电感;C为输出电容;R为负载电阻;vin和vo分别表示输入电压和输出电压。当Q1导通、Q2关断时,由KCL和KVL得到电路方程:
(8)
式中,kTs≤t≤(k+d(k))Ts。
当Q1关断、Q2导通时,电路方程为
(9)
式中,(k+d(k))Ts≤t≤(k+1)Ts。
运用状态空间平均法,将式(8)、(9)联立得
(10)
式中,kTs≤t≤(k+1)Ts。
选取电感电流iL(t)和输出电压vo(t)构成系统的状态向量,即x(t)=[iL(t)vo(t)]T,用欧拉前向差分离散的方法对式(10)离散化,得
(11)
2.2 PFC控制器设计
施加PFC的Buck变换器原理图如图2所示,整个系统可以看成是单输入单输出系统,输入变量即为控制输入d(k),输出变量为输出电压vo。对Buck变换器进行控制是为了得到一个稳定的输出电压,这相当于设定值固定不变,在此选择阶跃函数作为基函数[9],则控制变量为
d(k+i)=μii=0,1,…,P-1
(12)
递推得到(k+i)时刻的模型预测值:
(13)
由式(3)—(6)可以推导出
J(k)=‖D(k)-Gk·μ1‖2Q+‖H·μ1‖2R
(14)
式中:
D(k)=[D(k+1),D(k+2),…,D(k+P)]T,
D(k+i)=(1-βi)c(k)+βiy(k)-CAix(k)-hie(k);
Q=diag (q1,q2,…,qp);
R=diag (r1,r2,…,rp);
H(p×1)=[1,1,…,1]T。
由式(7)可得
μ1=MD(k)
(15)

由于PFC采用滚动优化的控制策略,因此实际作用于被控对象的是控制序列的第一个控制量。控制输入可改写为
d(k)=k0c(k)+k1y(k)-K2x(k)-k3e(k)
(16)
式中:
k0=M[1-β,1-β2,…,1-βp]T;
k1=M[β,β2,…,βp]T;
K2=M[CA,CA2,…,CAp]T;
k3=M[h1,h2,…,hp]T。
可见,对于一个可用离散状态空间方程表示的系统,当c(k)、P、β、hi参数已知时,k0、k1、K2、k3都是已知量,可通过离线计算得出,y(k)、x(k)可通过对电路进行实时采样得到,因此PFC算法具有在线计算量小、易于实现的特点。
3 仿真验证
为了验证PFC算法对Buck变换器控制的有效性,在MATLAB/Simulink仿真环境下搭建了仿真模型。为了更好地模拟实际情况,在仿真模型中加入了电感和电容的寄生电阻参数。Buck变换器具体电路参数如表1所示。
表1 Buck变换器电路参数
仿真中,对电感电流和输出电压进行采样,输入到PFC控制器,由式(16)计算出占空比d(k),然后与峰值为1的三角波进行比较,产生PWM控制信号,控制开关管Q1和Q2导通和关断。PFC控制器的控制参数分别为:c(k)=2.5;Tr=1.5×10-5s;p=4;Q=diag(1,1,1,1);R=0.01 diag (1,1,1,1);h=[5 4.5 3.5 2.9]T。仿真波形如图3所示。
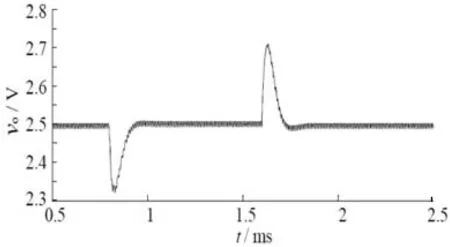
(a)输出电压vo波形
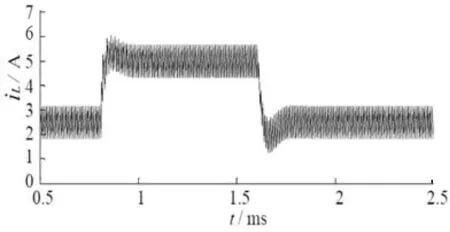
(b)输出电流iL波形
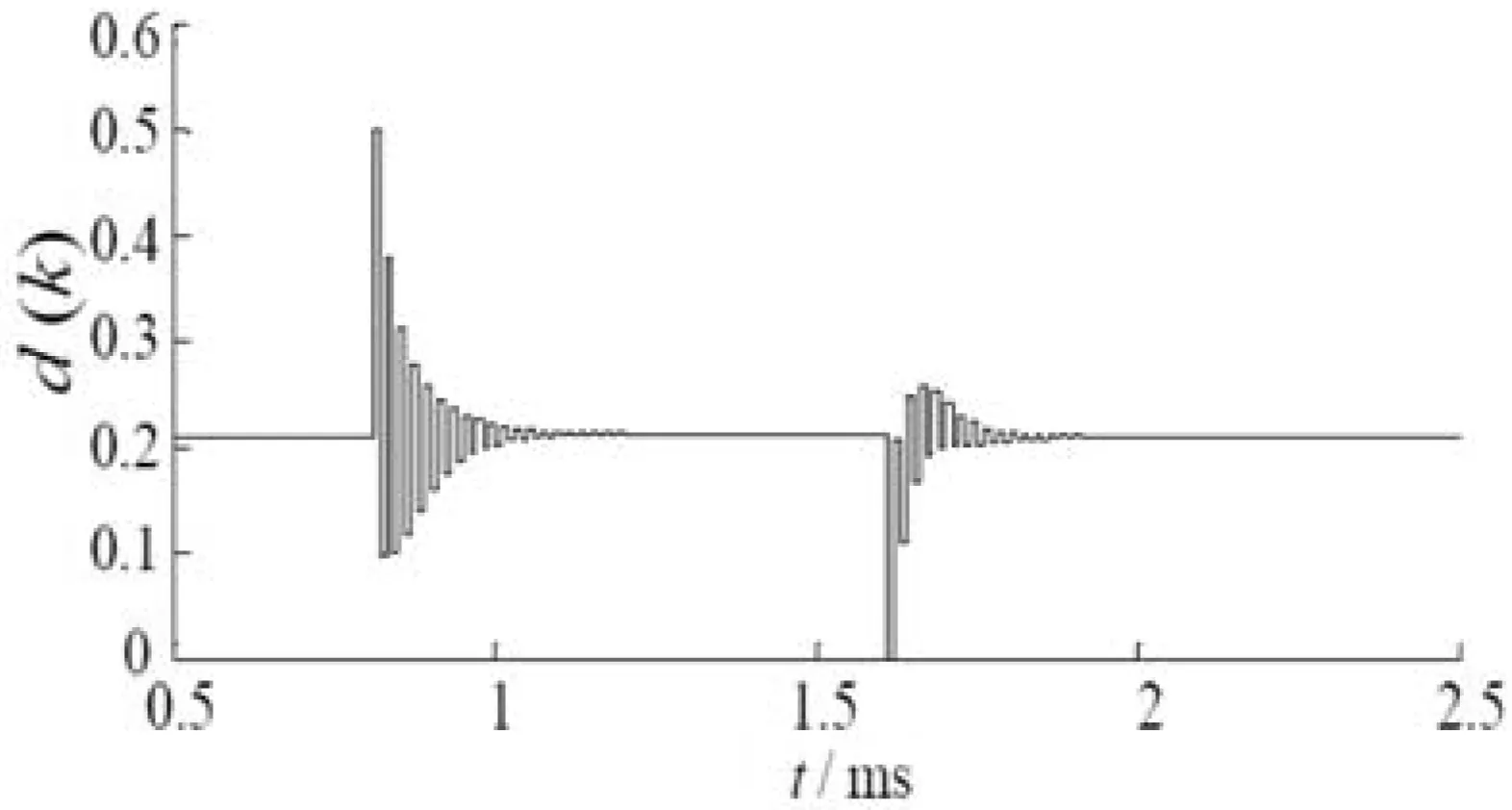
(c)占空比d(k)波形
在t=0.8 ms之前,Buck变换器的负载是1 Ω,输出电压稳定在给定值2.5 V,电感电流的平均值为2.5 A;在t=0.8 ms时,变换器的负载电阻从1 Ω切换到0.5 Ω,负载突然加大,输出电压有轻微下跌,下跌量约为0.18 V,接下去在PFC控制器作用下,输出电压快速跟踪到给定值2.5 V(经过12个开关周期);在t=1.6 ms时,负载电阻又从0.5 Ω切换到1 Ω,负载减小,输出电压产生0.2 V左右的超调量,经过12个开关周期调节后恢复到2.5 V。在跳变负载时,占空比变化很大,这有助于快速调节输出电压到给定值;而在稳态时,占空比几乎没有波动,从而使得输出电压非常稳定,不会产生波动。
4 结论
本文介绍了预测函数控制的基本原理,结合状态空间方程计算控制输入,通过对Buck变换器进行状态平均法建模得到预测模型,进而推导出占空比的表达式。通过仿真,验证了本文设计的预测函数控制器能使Buck变换器具有良好的稳态性能和快速动态调节能力。
猜你喜欢
湖北农机化(2021年7期)2021-12-07
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
自动化仪表(2015年5期)2015-06-15
汽车维修与保养(2015年6期)2015-04-17
电测与仪表(2015年16期)2015-04-12
质量技术监督研究(2015年1期)2015-04-09
电测与仪表(2014年13期)2014-04-04
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28