基于VGOS系统的UT1初步观测与计算
2018-11-09 08:37:02姚当弓剑军马浪明刘佳吴文雅徐磊吕林蔚吴元伟张秀忠王广利舒逢春杨旭海
时间频率学报 2018年3期
姚当,弓剑军,3,马浪明,刘佳,吴文雅,徐磊,吕林蔚,吴元伟,张秀忠,王广利,舒逢春,杨旭海,3
(1.中国科学院 国家授时中心,西安 710600;2.中国科学院大学,北京 100049;3.中国科学院 精密导航定位与定时技术重点实验室,西安 710600;4.中国科学院 上海天文台,上海 200030)
0 引言
甚长基线干涉测量(very long baseline interferometry,VLBI)是实现天球参考架和地球参考架的关键技术,主要由于它观测的目标为遥远的河外射电源,在空间上其位置是固定的。VLBI通过确定特定射电源的位置来实现国际天球参考架(ICRF),并通过标定30个分布全球的射电望远镜的位置和速度来实现国际地球参考架(ITRF)。VLBI通过测量确定地球定向参数(EOP),包括只能由其测定的UT1和章动,来连接ICRF和ITRF。
国际测地测天VLBI服务(IVS)组织协调全球天线进行观测研究,主要包括8~10个站的24 h全天观测,其世界时UT1测量精度在6~7 μs(相对于IERS C04 05系列),及2~4个站的每天1 h UT1加强观测,精度为15 μs[1]。为提高测量精度,IVS提出新一代VGOS(VLBI global observation system)系统:1 mm位置精度和0.1 mm/年的速度精度;连续测量站位置和地球定向参数及24 h内得到初始测地结果[2]。通过仿真研究,给出了使用12 m口径、转速快的小天线,宽带宽,灵敏度高,数据传输快等特点的天线系统来达到上述要求,同S/X双频观测系统相比较,天线口径明显减小,S/X系统的绝大多数天线口径都大于20 m;带宽增大,数据率明显提高,两者具体比较可参见表1,其中Jy=10-26W·m-2·Hz-1。

表1 S/X系统与VGOS系统对比
如今在天线制造,数字电子设备及数据传输技术飞速发展形势下,新一代射电天线成为可能。2010年10月,IVS VLBI计划执行组将部分可升级的S/X系统升级为VGOS系统,计划到2017年全球实现16个VGOS宽带系统的建设,2019年将实现30个,其中北半球23个,南半球7个[3]。
如图1所示,截至2017年初,全球陆续已有9台符合VGOS系统要求的站址建成,分别为KOKEE,GGAO,WESTFORD,YEBES,WETTZELL和ISHIOKA以及国内的吉林、喀什和三亚,还有11台正处于建设改造中,且从图1可发现绝大多数VGOS站集中于北半球,希望今后能有更多南半球VGOS站加入全球观测网中进行测地实验。

图1 2017年全球VGOS站分布
1 VGOS系统
中国科学院国家授时中心和上海天文台共同研制了“中科院VGOS系统”(如图2所示),包括:三亚、吉林、喀什3个观测站,和一个西安数据处理中心,其中喀什站是与新疆天文台合作建成,吉林站是与中科院长春人卫站合作建成。各站配备标准的VGOS天线,采用方位俯仰式13 m抛物面天线,主副面板精度分别为0.3 mm和0.1 mm;方位角范围为-270~+270°,转速和加速度分别为12°/s和3°/s2;俯仰角范围为5~90°,转速与加速度分别为6°/s和3°/s2;配备宽带接收机及宽带记录终端,并外接高稳定的氢原子钟,使用馈源制冷、宽带相关等技术,来提高测量精度。目前西安数据处理中心的观测纲要编制软件、三台站宽带VLBI硬件相关处理机、DIFX软件相关处理机、测地与定轨解算软件都已初步具备服务能力。
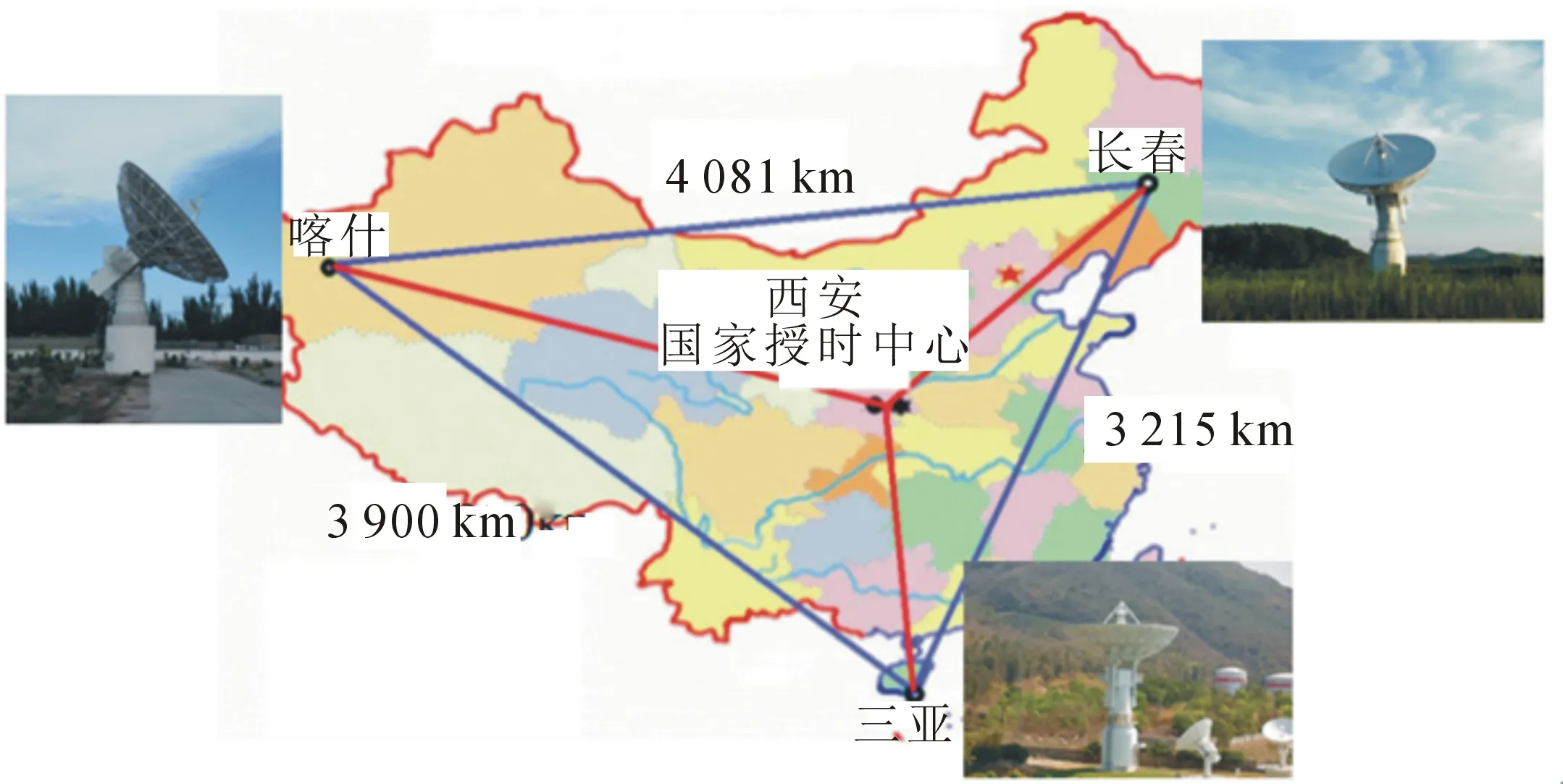
图2 中科院VGOS系统组成
接收机是天线系统的重要组成部分,其性能的好坏直接影响到整个观测系统。高灵敏度、高稳定度、高可靠性的超宽带接收机能够大大提高系统观测能力。馈源由四脊喇叭、耦合器、低噪声放大器(LNA)、3 dB电桥及连接电缆组成,全部置于制冷杜瓦内,满足台站系统噪声温度小于50 K的要求,然而对于喀什站,由于电磁环境差,噪声温度在80 K左右。真空泵作为前期辅助工具使杜瓦内的真空度低于0.001 pa,后通过氦气压缩机来维持杜瓦内温度处于12 K左右,以保障放大器的正常工作环境:低于70 K;接收机配备两级放大器,左旋、右旋极化信号首先经过一级低噪声放大器,后经过开与关可控的二级放大器来切换卫星和射电源观测模式(卫星信号太强,容易引起系统饱和)之后经过下变频器转换为中频信号再由记录设备采集数据并记录;系统的10 MHz信号由氢钟提供,相位校准源从信号接收口注入相位信号,以此拉平设备造成的相位跳动,具体可参见图3。

图3 VLBI 2010天线接收系统
每个测站天线的观测频段为1.2~9 GHz,每站配有4套相同的记录终端,每一套记录终端具有32个通道,每个通道32 MHz,每套记录终端最大可记录两路16通道的512 MHz,2 bit量化或者一路32通道的1 024 MHz,1 bit量化的宽带中频信号采样能力,记录的数据首先以Mark5B格式存储在本地磁盘阵列上,后通过专网传回西安数据处理中心。
数据处理流程如图4所示。数据传回西安后,各台站VLBI数据经过10 GE SFP+接口将数据高速送入相关处理机的数据缓存服务器,经分路处理后送入台站时延处理单元的FPGA芯片进行条纹旋转、傅里叶变换和小数比特延迟补偿运算,然后再同步送入基线单元进行交叉相乘得互相关函数的谱,并进行短时标的累加积分经网口按规定的格式将结果送存储服务器存储。硬件相关处理机在基于观测纲要生成的工作文件安排下运行,后处理进行带宽综合,提取观测时延,数据分析软件根据观测时延数据,利用最小二乘方法,解算并得到EOP及大气等参数。

图4 数据处理流程
2 实验与数据处理
2017年8月20日至8月22日对中星12号卫星(定点东经87.5°)进行差分VLBI观测,射电源观测频率在3.5~4 GHz,卫星为3.82 GHz,选取的参考射电源与目标卫星的角距小于15°[4]。因系统初建成,尽量选取C波段流量在1 Jy以上且在之前实验中系统能够得到条纹的射电源,主要有1741-038,2008-159,2134+00,0003-066,0106+013,0420-014,0605-085,0742+103,1055+018,3C273B和1510-089等,具体参见表2。
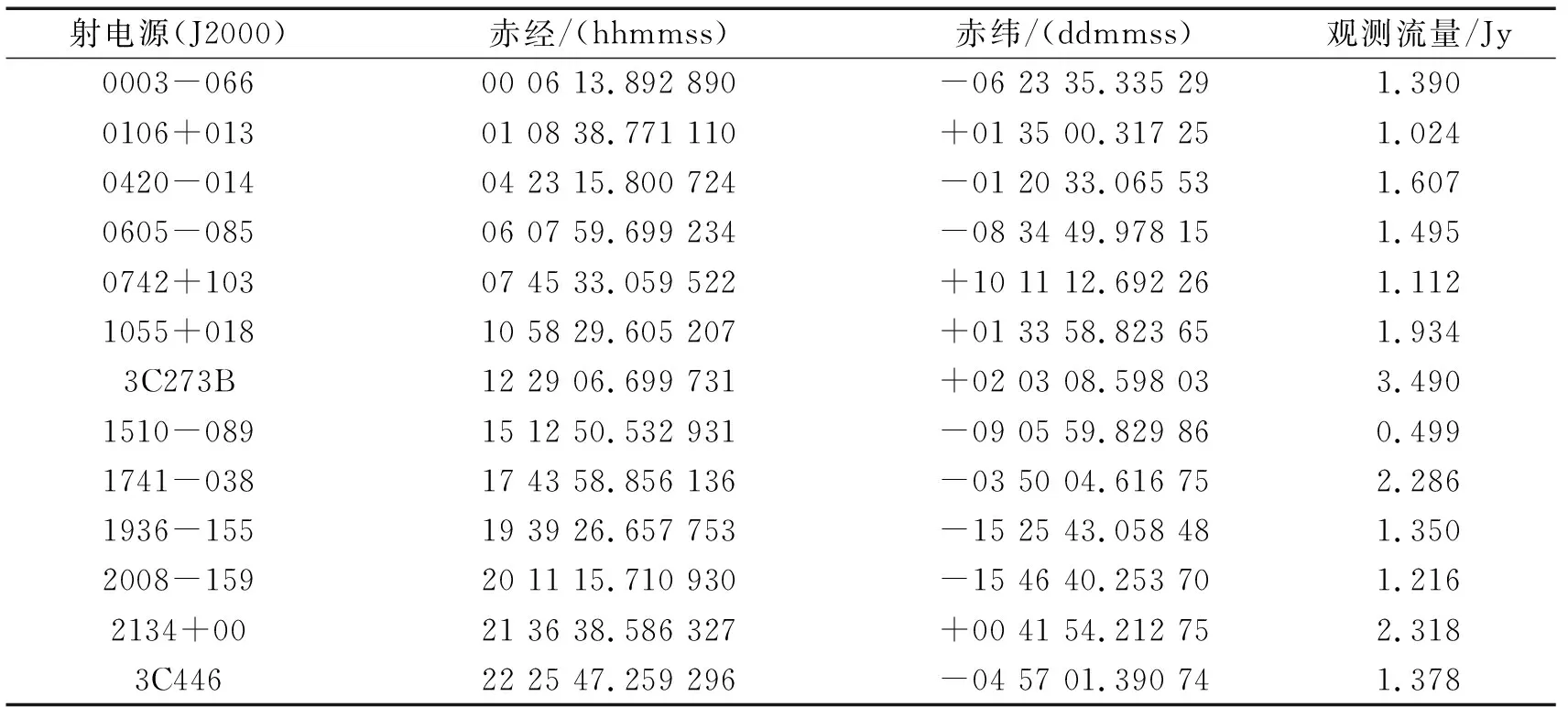
表2 观测射电源简介
因射电源的时延测量精度与SNR(signal noise ratio)和带宽成正比,SNR与源流量、观测时长、带宽成正比,所以在射电源观测中,120 s为一个周期,射电源跟踪记录90 s,天线转动30 s,采用512 MHz带宽2 bit量化,观测频率为3 522~4 034 MHz进行实验观测。
各站数据经专网传回西安数据处理中心后,通过硬相关机处理,得到各通道的频谱值,后处理从相位信息中提取时延值,并经过带宽综合处理,将3 522~4 034 MHz综合到3 826 MHz频率处,从中提取出射电源观测群时延,再结合三站气象站采集的温度、湿度、气压数据,生成分析软件所需的NGS数据格式文件[5],如图5所示。
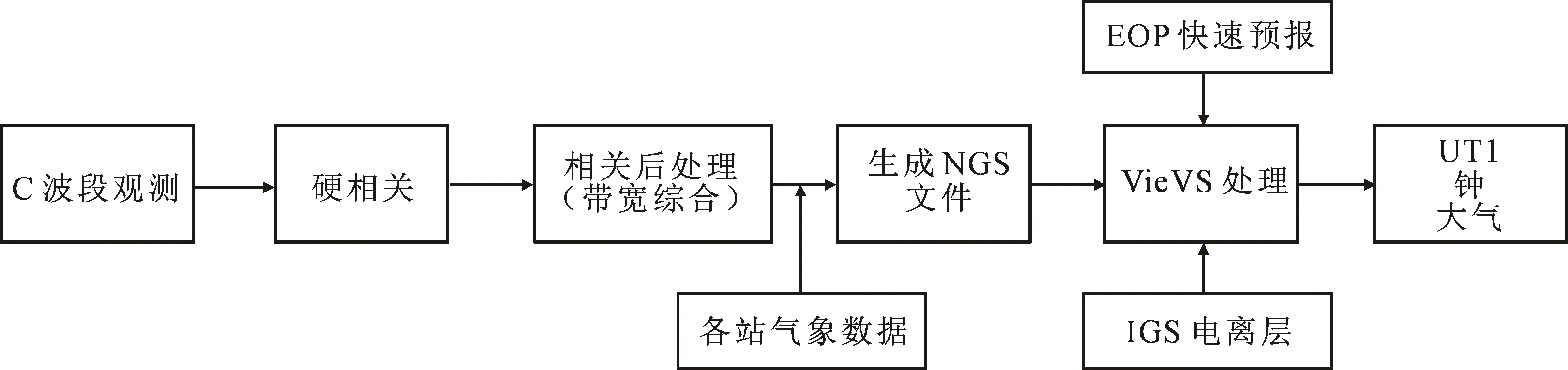
图5 数据处理流程
信号到达接收机的观测时延主要包括几何时延、对流层时延、电离层时延、天线形变引入的时延等。在观测时延中扣除对流层时延、电离层时延、天线形变等非几何时延后,同理论计算的几何时延相减后进行最小二乘求解所需参数,具体流程如图6所示。

图6 解算流程图
由于初次实验,并未深入研究设备时延、源结构、天线热形变等影响,所以在解算中这些误差源都未扣除,解算时只扣除了电离层、对流层时延,其中电离层采用IGS(International GNSS Service Center)提供的电离层文件插值获得,对流层则采用GMF(graphical definition model)模型。具体的时延模型公式为:
(1)
式(1)中,i表示观测数,j表示待解算参数个数,Oi为观测时延,vi为残差,φi(x)为几何时延,Ttrop,i为大气时延,Tion,i为电离层时延,Tclock,i为钟差,Tother,i为设备、射电源结构等引入的时延。在不考虑设备、射电源结构等误差源的情况下,解算结果可表示如下:
Toc,i=Oi-φi(x0)-Tion,i-Ttrop,i-Tclock,i,
(2)
(3)
vi=Aδx-Toc,i。
(4)
式(2)~(4)中,Toc,i表示观测值与理论值之差,A表示求解参数的偏导数矩阵。使用数据分析软件VieVS(vienna VLBI and satellite software),采用单次解模式,射电源坐标来自ICRF2[6],站坐标由GPS测量提供,岁差章动采用IAU 2006/2000A模型,EOP初值由IERS公布的EOP C04 08给出,每次观测解算估计以下参数:各站湿大气天顶距时延改正值ΔTzwd,站间钟差改正值ΔTclock及一个UT1改正值ΔUT1[7],如式(5)和式(6)所示。
(5)
(6)
式(5)中,mw(ε)为湿大气映射函数。由于此次观测时间长,超过15 h,钟差与大气变化快,同国际上1 h加强观测不同,其钟差估计间隔为1 440 min,本文需对湿大气和钟差进行分段估计。同时在解算过程中进行高频改正,采用拉格朗日方法将EOP初值序列插值到观测历元后,加入海洋潮汐影响和短周期UT1变化的高频模型修正[8],便于与IERS C04比较。
3 结果与分析
经过VieVS对3 d数据处理,解算结果参见表3,表中JL代表吉林站,SY代表三亚站,KS代表喀什站,ΔUT1表示解算结果与IERS C04 08数据文件中(UT1-UTC)参数值之差。从表3中可知3次的精度基本一致,为0.2 ms左右,且3次实验的解算结果在UT1约1σ情况下是吻合的。

表3 实测数据解算结果
为验证此次结果的合理性,采用蒙特卡罗仿真分析方法[9]对观测进行仿真测试,生成各个观测的仿真时延,并得到仿真时延与理论时延之差,具体过程如图7所示。仿真参数主要包括3部分:①钟;②湿大气;③白噪声(表征系统误差)。钟的模拟采用Allan标准方差1×10-14@50 min,符合当前站上氢钟的频率稳定特性[10];因系统不稳定因素多,白噪声设为30 ps;对流层模型根据湍流理论[11]及由Nilsson提出的策略[12]进行仿真,三站对流层参数在仿真中设置一致。

图7 仿真流程图
因系统误差影响是随机的,所以对2017年8月20号的数据进行30次仿真(3 d观测纲要基本一致),得到一个可信的统计结果来分析比较实际解算结果。在理想情况下(无站坐标、电离层误差,只含钟及大气误差)统计结果如图8所示,图8(a)表示VieVS解算得到的ΔUT1(UT1-UTC)值与IERS C04 08中事后精密值比较,实心点表示VieVS值,中间横线表示IERS值;图8(b)表示偏差值ΔUT1VieVS-ΔUT1IERS,其偏离IERS(UT1-UTC)参数平均为0.0 761 ms,方差为0.1 399 ms。

图8 理想情况下仿真结果(2017-08-20)
目前三站站坐标采用GPS测量获得,同国际上测地观测方式得到的精确站坐标存在十几厘米的误差,这对解算结果中的偏差有很大影响[13],为更好分析其对结果影响,在喀什站站坐标加入Δx=10 cm,Δy=10 cm,Δz=10 cm偏差,仿真结果如图9所示,平均偏差为0.188 7 ms,方差为0.139 9 ms,可见站坐标误差主要影响偏差。
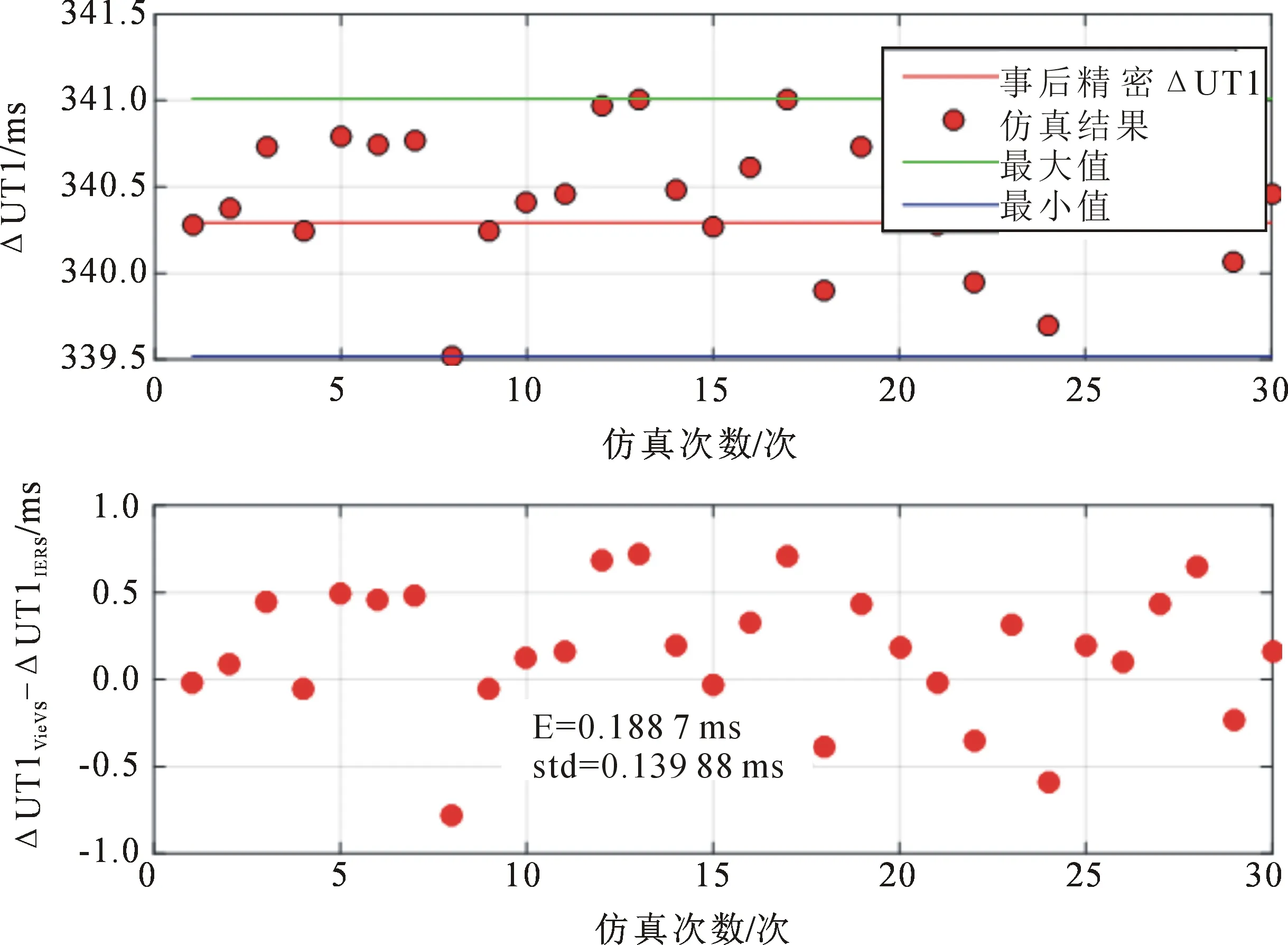
图9 站坐标偏差影响(2017-08-20)
3 d观测都是在C波段单频观测,不同于国际上S/X双频观测,它能有效地扣除电离层时延,本文在解算过程中则采用IGS提供的电离层网格插值获得,这势必将存在几个TECU的误差,仿真中加入0.1倍电离层时延到观测时延中,结果如图10所示,平均偏差为0.048 3 ms,方差为0.278 9 ms,可见电离层对方差影响大。
综上分析,在站坐标不精确,无法有效扣除电离层情况下,经仿真可知,该模式下的解算精度在0.2 ms左右,同实测结果在一个量级上,可证实在观测数据少的情况下,实测解算结果是合理的,同时也为后续开展相关工作提供了经验。
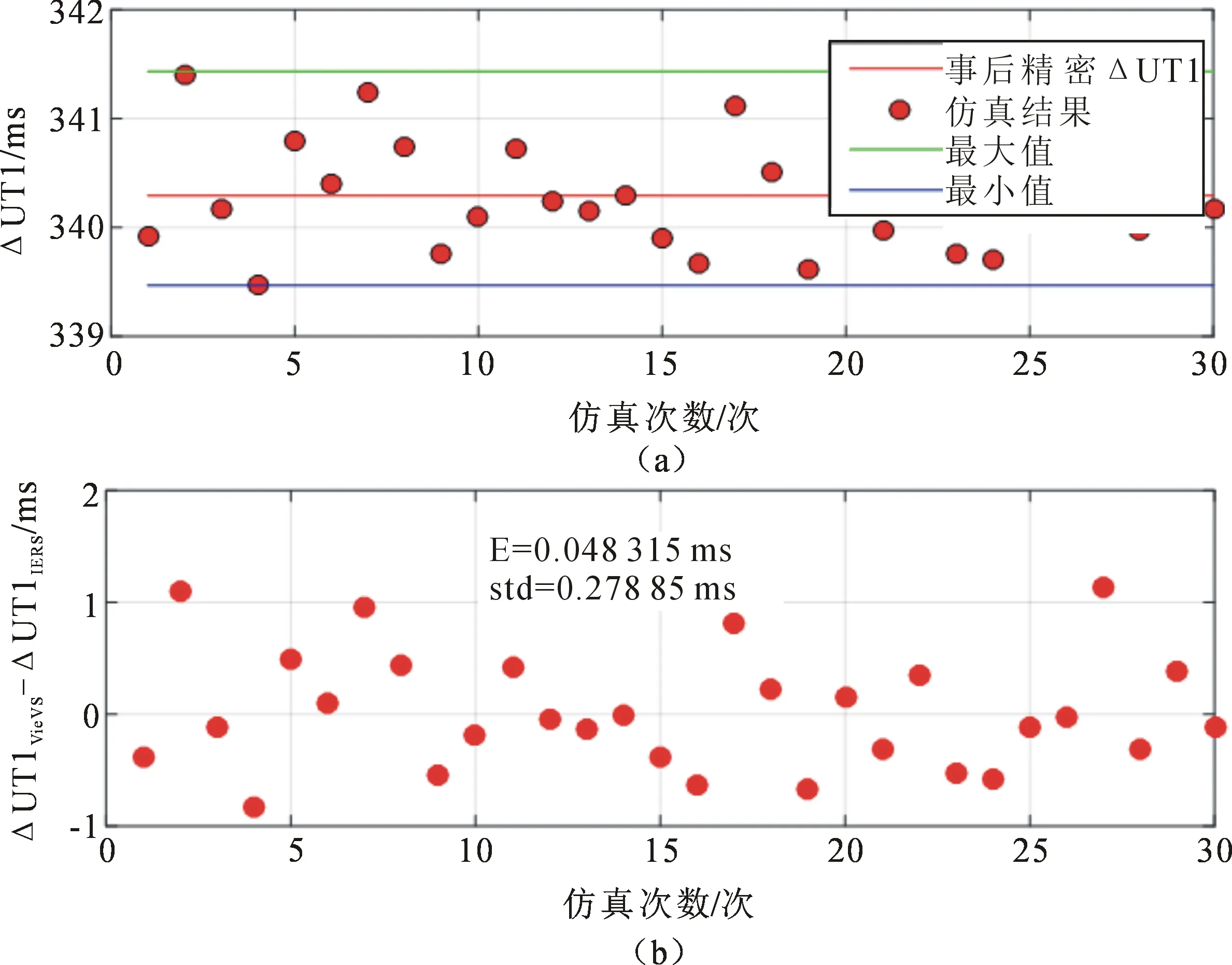
图10 电离层影响(2017-08-20)
4 结语
当前中科院首先在国内建立3台VGOS天线,并有相应的数据处理中心;近期利用3台天线开展了射电源与卫星的观测,通过上述实测数据结果及分析可知,本次解算结果与IERS事后精密值在≈1σ下基本吻合,这表明三站能独立自主地开展UT1测量,这对授时单位来讲是非常重要的,同时在卫星定轨精度上也有改进。后续将在C波段开展专门的UT1观测模式,测试系统的测量精度。
致谢:在此感谢上海天文台的钱志翰老师,张秀中老师,舒逢春老师,王广利老师等在观测、硬相关及数据处理上的指导,并对合作单位新疆天文台与长春人卫站表示感谢,正是在他们的运营维护下,基础设施才有了保障。
猜你喜欢
心理学报(2022年4期)2022-04-12 07:38:02
空间科学学报(2021年4期)2021-08-30 08:31:16
水泵技术(2021年3期)2021-08-14 02:09:20
空间科学学报(2021年2期)2021-07-21 08:43:28
电子制作(2019年23期)2019-02-23 13:21:12
测控技术(2018年6期)2018-11-25 09:50:10
雷达学报(2017年6期)2017-03-26 07:53:02
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
电测与仪表(2016年17期)2016-04-11 12:38:28
中国惯性技术学报(2015年1期)2015-12-19 13:12:17