基于七维状态向量反向无迹卡尔曼滤波的弹道外推算法
2018-11-07 02:39谢恺秦鹏程
兵工学报 2018年10期
谢恺, 秦鹏程
(陆军炮兵防空兵学院, 安徽 合肥 230031)
0 引言
弹道外推算法是炮位侦察校射(简称侦校)雷达实现炮位侦察校射功能的关键,算法的适用性和优劣直接影响弹道外推的精度[1-2]。滤波外推法是当前炮位侦校雷达使用的主要算法,现有的滤波外推算法以弹丸位置和速度建立六维状态(简称六态)向量,通过扩展卡尔曼滤波(EKF)算法进行外推,但存在低伸弹道等情况下定位精度低的问题[2]。滤波外推算法需要建立弹道方程,其最初的目的主要是为了编制射表[3],因此弹道方程只是较好地拟合了火炮射程,但对整条弹道曲线的空间位置拟合效果并不理想,即弹道模型和真实弹道并不完全重合,存在模型误差,导致外推距离越远,外推误差越大。此外,现有的滤波外推算法假设弹道系数为常数,以相邻两点的速度、加速度滤波值代入弹道方程,只能进行粗略估计[4]。文献[5]通过经验公式求取弹道系数,但对先验条件要求苛刻,难以实际使用。弹道外推算法本质上是一个非线性估计问题,当采用EKF算法进行估计,如2阶Taylor级数以上项无法忽略时,线性化将会产生较大的误差。
基于以上考虑,本文对现有的外推算法进行了研究和改进。通过增加状态向量,选用无迹卡尔曼滤波(UKF)等非线性滤波算法建立反向外推模型,分别开展对弹道方程的七维状态(简称七态)向量算法、UKF算法及反向外推算法的研究,择优选取弹道外推所用算法。最终验证了基于七态向量反向UKF(简称七态反向UKF)外推算法。
1 基本模型
采用卡尔曼滤波算法计算弹道系数时,首先要建立弹丸运动状态方程。考虑到弹道外推的快速反应、实时性等要求[6],通常选用质点弹道模型[1-4]。弹道系数是影响弹道外推的重要参数,现有的滤波算法以弹丸在三维空间的位置和速度为状态向量建立状态方程,在认为弹道系数为常数的条件下,以相邻两点的速度、加速度滤波值代入弹道方程进行弹道系数粗略估计。这种估计方法存在一定的误差,有时甚至超出了理论范围,目前只能采取硬限幅进行限制。还有一种弹道系数估计方法,通过马赫数、阻力系数、弹丸速度等参数求取弹道系数[5],该算法对先验条件的要求较高,难以实际使用。
为精确求解弹道系数,可将其纳入滤波过程,选取弹丸位置(x,y,z)及其在相应坐标轴上的速度分量(vx,vy,vz)以及弹道系数Cb形成七态向量
X=[x1,x2,x3,x4,x5,x6,x7]T=[x,y,z,vx,vy,vz,Cb]T.
(1)
状态方程是描述动态系统各状态变量和输入之间关系的方程,通常采用状态变量1阶导数来描述各状态、输入和时间之间的关系。弹道估计时状态方程[5]为
(2)
测量方程是表达状态变量、测量变量和输入之间关系的方程,通常情况下测量值是状态变量的线性组合。炮位侦校雷达的测量值矢量可以表示为
Z=[Rβε],
(3)
式中:R为雷达到目标的距离;β为雷达探测目标的方位角;ε为雷达探测目标的俯仰角。引入零均值高斯白噪声V,其方差为Q,则量测方程[1,5]为
(4)
2 数据处理
2.1 UKF算法
UKF算法以无迹变换[7]为基础,采用卡尔曼线性滤波框架,具体采样形式为确定性采样,对非线性函数的概率密度分布进行近似;估计精度至少达到2阶,计算量与EKF算法处于同一量级;不需要计算Jacobian矩阵,可以处理不可导的非线性函数[7]。与EKF算法一样,UKF算法使用线性最小均方估计的方法进行测量更新。根据测量更新框架,使用无迹变换来处理均值和协方差的非线性传递,就可以得到UKF算法。
考虑如下非线性高斯离散时间系统:
(5)
式中:x(k)∈RLx为系统在k时刻的状态,z(k)∈RLz为k时刻的观测量,Lx、Lz分别指状态和观测量的维数;u(k)和v(k)分别为系统的模型误差引起的状态噪声和测量噪声,其协方差分别为R和Q.
针对(5)式描述的系统,UKF算法流程[8-9]如下:
1)设置状态的初始条件
0=E(x0),P0=E[(x0-0)(x0-0)T],
(6)
2)计算样点
计算2L+1个Sigma点,即采样点,
(7)
式中:L为状态维数;λ为一个缩放比例参数。
3)时间更新
样点集的一步预测
Xk|k-1=f[Xk-1];
(8)
系统状态量的一步预测及协方差矩阵为
(9)
(10)
式中:W为各采样点相应的权值,下标m为均值、c为协方差,上标i为采样点数。
预测的观测值
Zk|k-1=h[Xk|k-1].
(11)
4)测量更新
系统预测的均值及协方差
(12)
(13)
(14)
增益矩阵
(15)
系统的状态更新和协方差更新
(16)
式中:zk为k时刻的观测量。
(17)
计算各采样点对应的权值
第二种是对Thread子类进行定义,也对run方式进行重写:clasMyThread extends Thread{public void run(){}}
(18)
式中:λ=α2(L+κ)-L,用来降低总预测误差,α为控制采样点的分布状态,κ为待选参数,其取值应确保(L+λ)P为半正定矩阵;参数β可以合并方程中高阶项的动差,β≥0.
2.2 反向外推算法
如图1所示,目前的弹道方程外推采用卡尔曼滤波算法,沿时间轴的正方向对方程进行逐点线性化,Ss(起始波束)作为滤波初值,Se(截止波束)作为滤波终点。外推时从Se开始,按照估计的七态向量进行反向递推,状态转移方程为
Sk+1=ΦkSk+ωk,
(19)
式中:Sk为k时刻观测波束;Φk为状态转移矩阵;ωk为状态噪声。这种情况下弹道外推距离从Se延伸到炮位水平面。
为了减小外推距离、降低外推误差,本文提出了弹道方程反向外推算法,将跟踪的截止波束Se作为滤波起点,将起始波束Ss作为滤波终点,沿时间轴的负方向进行滤波外推。将弹道方程的状态方程转换为
Sk=ΨkSk+1+τk,
(20)
并重新逐点线性化,该算法的关键是推导(20)式。本文给出的反向滤波算法,保持状态转移矩阵Ψk=Φk和状态噪声τk=ωk,对时间“方向”取反向,将跟踪波束中的最后一点Ss作为卡尔曼滤波的起始点,各坐标轴上的速度分量为(-vx,-vy,-vz),于是(1)式可改写为
X=[x1,x2,x3,x4,x5,x6,x7]T=
[x,y,z,-vx,-vy,-vz,Cb]T.
(21)
沿弹丸运动轨迹反向滤波,得到跟踪起始点Ss的弹道方程七态参量,将参量中的速度分量取负数,用4阶龙格- 库塔方程[3]进行外推,就得到了炮位坐标。该方程的外推距离从Ss延伸到炮位面,此算法外推距离短、误差更小。
3 仿真及性能分析
表1中列出了10 000次蒙特卡洛仿真条件下各算法的外推终点圆中间误差和平均用时以及算法的改进效果。由表1可以得出结论:上述各算法的计算量处于同一量级,七态算法定位精度要优于六态算法;UKF算法定位精度要优于EKF算法;反向算法定位精度要优于正向算法。下面结合图2、图3对各算法优化项取得表1中优化效果的原因进行分析。
将靶场弹道精密测量雷达数据相邻两点的速度、加速度滤波值代入弹道方程,求得弹道系数,作为仿真中的真实弹道系数。计算各算法求得的弹道系数与真实弹道系数的误差。图2从10 000次蒙特卡洛仿真中随机抽取了20次七态算法得到弹道系数误差。从图2可以看出:将弹道系数纳入滤波过程,求得的弹道系数误差更小,有助于提高弹道外推的精度。
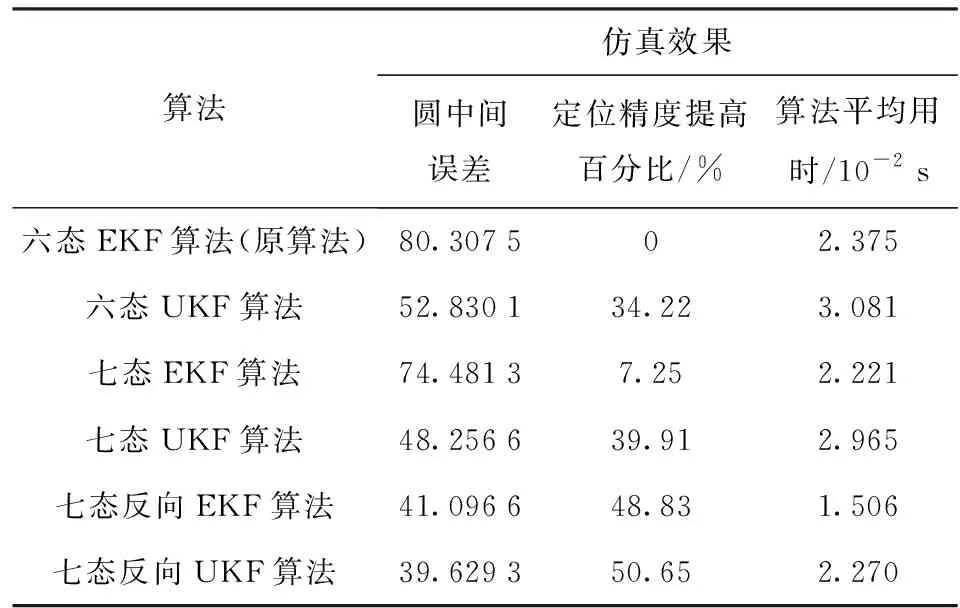
表1 外推算法仿真结果对照表
为方便观察,图3中列出了不同算法滤波处理后的位置误差、速度误差。经滤波处理后的终点作为外推起点,分析各图中滤波终点误差。由图3(a)、图3(b)可以看出:六态UKF算法位置误差略高于六态EKF算法,但其速度误差明显低于六态EKF算法。由图3(c)、图3(d)可以看出:七态UKF算法位置误差与七态EKF算法基本一致,但速度误差较小。由图3(e)、图3(f)可以看出,七态反向UKF算法位置误差、速度误差都要低于七态反向EKF算法。由于位置误差造成的影响将会直接叠加在外推落点上,而外推过程中的速度误差却通过误差累积使其影响不断扩大,因此速度误差对外推的影响更大。从图3(a)、图3(b)可以看出,UKF算法存在位置误差稍大的情况,但是由于其速度误差小,UKF算法的定位精度依然较好,如表1所示。
通过上文对弹道系数误差和位置误差、速度误差等比较项进行的分析可以看出:1)采用七态算法可以有效地降低弹道系数误差。虽然图3中七态算法位置误差在部分采样点大于六态算法,但由于其数值较小,而且位置误差基本是平移到定位误差上,与速度误差、弹道系数误差等放大到定位误差的累积效应相比,基本可以忽略。因此,七态算法定位精度仍要高于六态算法,如表1所示。2)采用UKF算法,可以降低滤波终点的弹道系数误差、位置误差和速度误差,外推精度高。3)与七态算法相比,七态反向算法对空气阻力建模不够全面,因而存在一定的位置误差、速度误差,二者弹道系数误差大小处在同一水平,如图2、图3所示。但反向算法减小了外推距离,降低了模型积累误差,而模型积累误差对定位精度的影响更大。因此,反向算法滤波外推效果更好,如表1所示。
基于以上分析,本文提出的七态反向UKF算法,在不显著增加计算量的基础上定位精度比原算法提高约50%,在炮位侦校雷达定位精度上体现了优越性。
4 结论
本文针对一定条件下炮位侦校雷达定位精度偏低的问题,提出了七态反向UKF算法。该算法将弹道系数纳入滤波过程,可以有效地提高弹道系数的精度。采用UKF算法进行非线性参数估计,比EKF算法具有更高的精度和稳定性。使用反向滤波算法能够减少外推距离,进而降低弹道方程的模型误差。理论分析与仿真表明,新算法在计算量相当的情况下,具有更高的定位精度。
本文所采用的外推算法虽然具有较高的精度,但主要工作是对滤波算法进行优化,没有充分利用先验信息,如弹丸的多普勒速度、弹丸的重力约束等。下一步将充分利用先验信息,建立更为完善的弹道外推模型。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
小哥白尼(趣味科学)(2022年3期)2022-06-09
导航定位学报(2021年4期)2021-08-29
数字海洋与水下攻防(2020年5期)2021-01-04
北京航空航天大学学报(2019年9期)2019-10-26
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电子制作(2019年9期)2019-05-30
电子制作(2019年7期)2019-04-25