
滑模控制在有源电力滤波器直流侧中的应用
2018-11-06 07:44,,,
电气开关 2018年2期
,,,
(广西大学电气工程学院,广西 南宁 530004)
1 引言
随着电力电子技术的飞速发展,电力系统中的非线性电力设备的应用日趋广泛,给电力系统带来的的谐波污染也日趋严重。谐波不仅降低了电网电能的质量而且还有可能导致电力设备的故障。APF能够对谐波进行动态的跟踪和补偿[1-3]。
补偿电流发生电路是并联型有源电力滤波器的重要组成部分之一。补偿电流发生电路由电压型PWM逆变器、驱动电路以及电流跟踪控制电路组成,为保证其有良好的补偿电流跟随性能,必须将逆变器的直流侧电压控制为一个适当的值[1]。
滑模变结构控制可以对滑动模态进行设计且与对象参数及扰动无关,这就使得变结构控制具有快速响应、对参数变化及扰动的不灵敏、无需系统在线辨识、物理实现简单等优点[4]。采用滑模控制设计三相三线制有源电力滤波器的电压环可以改善系统的鲁棒性和补偿效果。
2 APF的工作原理
三相三线制并联型APF的主电路拓扑如图1所示,APF通过谐波检测电路检测并分离谐波成分,在通过PWM电压型逆变器产生于谐波大小相等方向相反的补偿电流补偿至电源端,以达到抑制谐波的功能。
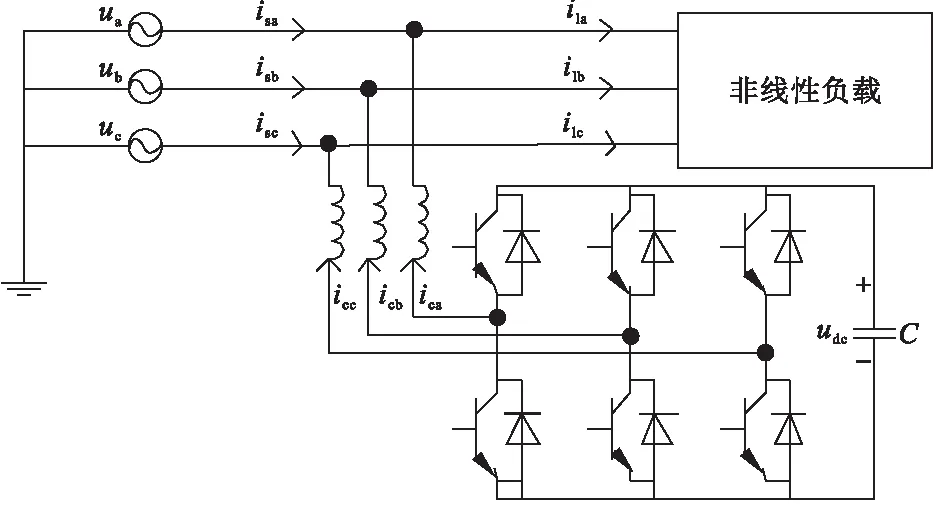
图1 并联型有源电力滤波器主电路拓扑结构图
3 APF控制策略
目前,APF直流侧控制的传统方法是在控制过程中采用比例积分调节器进行直流电压控制,通过APF装置的PI升压控制将APF直流侧电容电压值调节到参考值处。PI参数整定方法有自适应比例积分微分控制)、模糊逻辑、神经网络以及非线性控制方法[5-8],但该类方法难以在APF装置中实际应用。
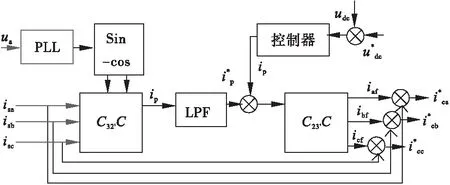
图2 APF电压控制原理图
4 APF软启动方法
由于APF的交流侧电感很小,直流侧仅有电容,如果不经过软启动过程直接将较大的指令电流送给指令跟踪控制电路,将产生很大的冲击电流,导致直流侧电压波动较大,对功率器件的安全造成威胁[9]。
针对APF启动的特点提出软启动方法和步骤:
(1)预充电过程
开始启动时,电容处于无电压状态,将利用IGBT的反并联二极管经限流电阻将直流侧电容电压预冲至电网线电压的峰值537V左右。当直流侧电压检测回路检测到电压达到一定值时,将限流电阻切除。
(2)电压环软启动
切除限流电阻后,启动电压环对直流侧电压进行控制。直流侧电压与电压给定值还有很大的差距,传统的PI控制在容易引起直流侧电压的超调,进而损害IGBT和直流侧电容。而采用滑模控制代替传统的PI控制,可以实现APF直流侧电容电压平稳上升并达到给定值且无电压超调。
5 基于趋近律的准滑模变结构控制系统的设计
滑模变结构控制器的设计一般分为两步:①设计切换平面s(x),使它具有良好的渐进稳定性和动态性。②设计满足达到条件的滑模动态控制律u±(x),从而使在切换面上形成滑模动态[4]。
其中切换面s(x)应满足滑动模态的达到条件即:
(1)
滑动模态的达到条件仅能保证系统的状态在有限的时间内到切换面而无法限制趋近运动的轨迹和速度,这样就会产生很大的抖振。
采用趋近律的方法设计滑模控制器,对系统向切换面的运动过程进行控制可以有效的减小抖振。
(2)
则有状态方程为:
(3)
(4)
设滑模切换面方程为:

(5)
式中c为常数。
采用幂次趋近律设计滑模控制器,幂次趋近中,趋近速度由运动点到切换面的距离的大小决定,距离越远速度越大,随着运动点距离切换面越来越近,趋近速度逐渐减小,保证了快速趋近的同时削弱了抖振。幂次趋近律:
(6)
式中,ε和α都是常数;slaw为滑模控制器的趋近律,其中sgn(s)为符号函数。
由于变结构控制是一种非线性控制,在实际应用中,由于存在着时间的延迟和空间的滞后等限制因素,往往使光滑的滑动模态叠加了抖动。从相轨迹的方面来说,理想的滑模动态控制是使在一定范围内的状态点都被吸引至切换面。设置一领域使一定范围内的状态点都被吸引至领域内,通常将此领域称为边界层。它可以使控制系统在边界层内进行结构变换而不需要再切换面上进行变换,从而削弱了抖动。这采用饱和函数sat(s)代替控制律中的符号函数sgn(s):

(7)
式中q=1/Δ,Δ为大于0的常数。
将式(5)~(7)带入式(3)中得到准滑动控制控制律:
(8)
6 仿真结果与分析
采用滑模控制时APF直流侧的电压如图3所示。由图3可知在0~0.18s期间直流侧电容由IGBT的反并联二极管进行充电。当0.18s时电容充电到接近线电压峰值500V,切除限流电阻,解锁IGBT驱动脉冲,引入控制器对电容继续充电。滑模控制下的电容电压上升平缓,且无电压过冲,在0.3s左右到达700V,并保持不变,实现了软启动。
APF的电源侧a相补偿前(后)电流如图4所示,由图4可以看出在0.18s投入滑模控制器后的电源侧a相电流侧电流接近正弦,且过冲电流很小,实现软启动。
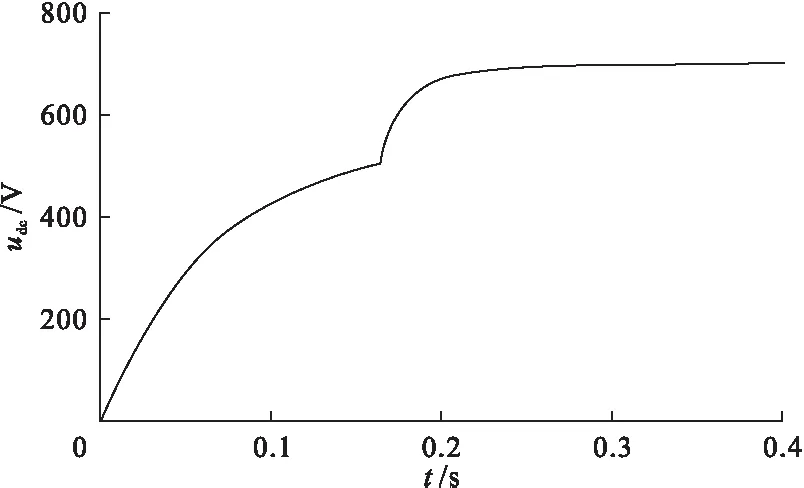
图3 APF直流侧电压
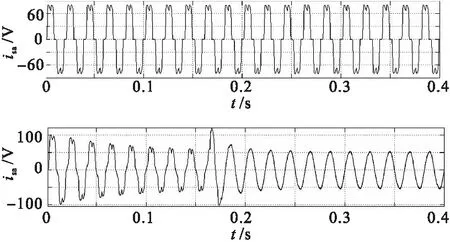
图4 APF的电源侧a相补偿前(后)电流
APF的电源侧a相补偿前后电流频谱如图5所示,由图可看出补偿后电源侧的谐波率由补偿前的25.22%下降到3.42%,补偿效果良好,验证了滑模控制在并联型有源电力滤波器直流侧的应用的可行性。
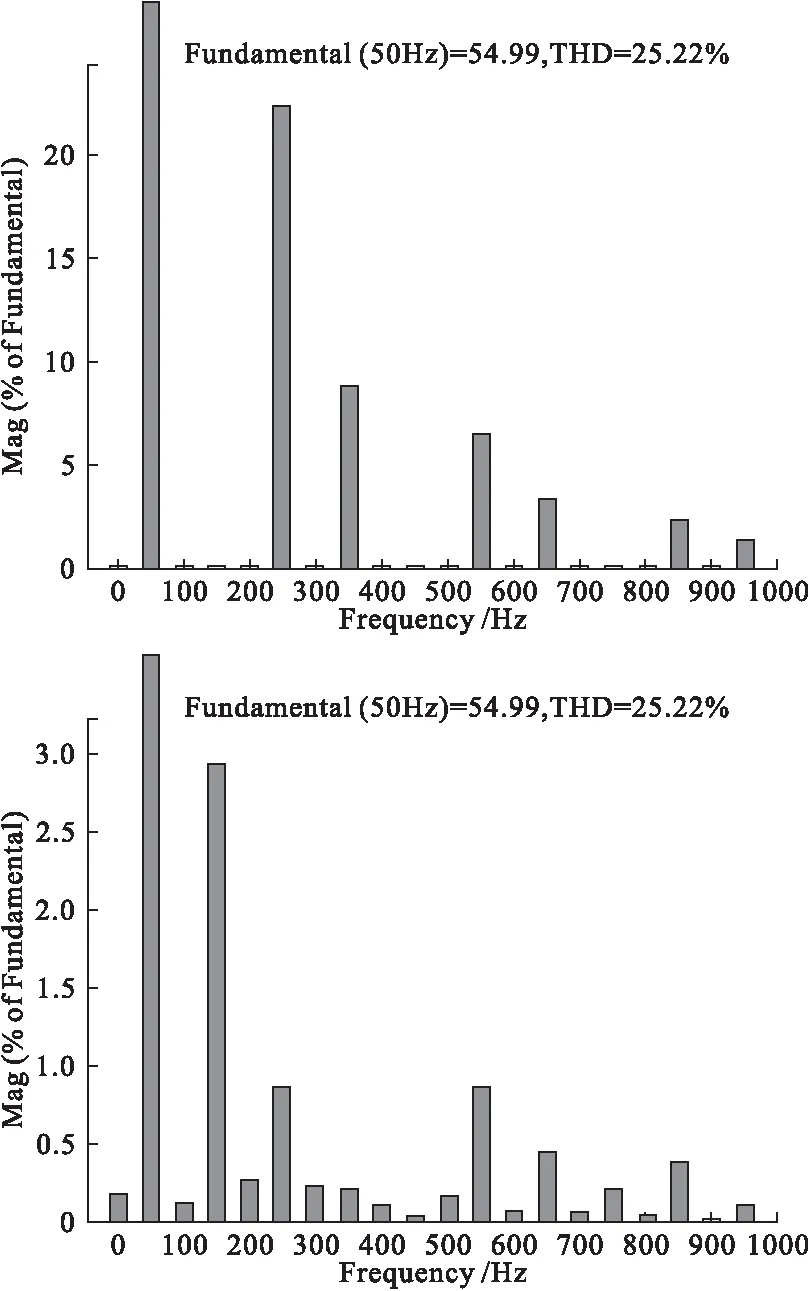
图5 APF的电源侧a相补偿前(后)电流频谱
7 结语
根据传统的直流侧电压控制策略所存在的不足,结合滑模控制理论设计了一种基于趋近律的滑模控制方法用于实现软启动和提高鲁棒性。通过MATLAB对该控制算法进行了仿真,验证了该算法的正确性,仿真结果表明该控制算法具有良好的动态性能及鲁棒性,并且实现了软启动,抑制了过冲电压。相对于传统的控制方法有着更加优越的性能。
猜你喜欢
电气技术(2022年1期)2022-01-26
中学生数理化·中考版(2021年10期)2021-11-22
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
上海公路(2017年1期)2017-07-21
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
中国科技信息(2015年18期)2015-11-10
