
一类非零元个数最少的谱任意Ray 模式
2018-11-05 08:03邓将武
福州大学学报(自然科学版) 2018年5期
邓将武, 刘 月
(福州大学数学与计算机科学学院,福建 福州 350116)
0 引言
一个n阶矩阵A=(ajk)是Ray模式矩阵,是指A的元素ajk∈{eiθ|0≤θ<2π}∪{0},i2=-1.A的定性矩阵类为
QR(A)={B=(bjk)∈Mn(C)|bjk=rjkajk,rjk∈+, 1≤j,k≤n}
Ray模式是符号模式[1]的一种复推广.
n阶Ray模式矩阵A称为谱任意的,是指对任意的首一n次复系数多项式f(x),存在一个复矩阵B∈QR(A),使得B的特征多项式为f(x).
本研究将运用幂零-中心化方法研究Ray模式S的谱任意性. Ray模式A′和Ray模式S的形式如下
1 幂零-中心化方法
对于Ray模式A,若存在复矩阵B∈QR(A)和正整数k,使得Bk=0但Bk-1≠0,则B为幂零矩阵,从而A蕴含幂零,称k为复矩阵B的幂零指数.
设Ray模式P=(pjk)和Ray模式A=(ajk),如果对于ajk≠0, 都有ajk=pjk,则称Ray模式P=(pjk)是Ray模式A=(ajk)的母模式.
设A为n×n矩阵,若C(A)={B|AB|=BA,B∈Mn(C)} ,则称C(A)为A的中心,且B为A的中心化子矩阵.
下面的定理介绍了幂零-中心化方法.
定理1[9](幂零-中心化方法) 设A是一个n阶Ray模式,B∈QR(A)是一个幂零指数为n的幂零复矩阵. 如果在B的中心里满足条件C∘AT=0(这里C∘AT表示矩阵C和AT的Hadamard乘积)的矩阵C只有零矩阵,则Ray模式矩阵A及其每一个母模式都是谱任意的.
根据定理1,在第2节中,首先找到一个幂零矩阵B∈QR(S),其次证明满足条件C∈C(B)且C∘ST=0的矩阵C只能为零矩阵,进而证明Ray模式矩阵S是谱任意的.
2 主要结果
设n是一个正整数且n≥5. 考虑如下n×n复矩阵
(1)
这里α>0,β>0. 如果aj>0(1≤j≤n-1)和bj>0(1≤j≤n-1),则B∈QR(S). 记
(2)
其中
fk=fk(α,a1,a2, …,an-1;b1,b2, …,bn-1,β),gk=gk(α,a1,a2, …,an-1;b1,b2, …,bn-1,β)
分别表示λn-k系数αk的实部和虚部,k=1, 2, …,n.

以及
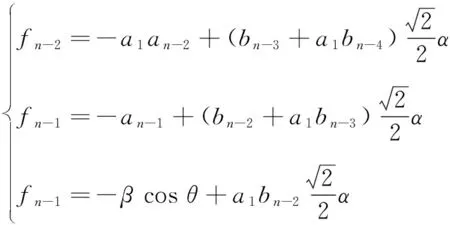
证明 对于2≤t≤n-2,记
由式子(2)可得
将|λI-B|按第一列展开可得
因此,可以得到
所以引理得证.
证明 设B有形式(1),若aj>0(1≤j≤n-1)和bj>0(1≤j≤n-1),使得在fk=0(1≤k≤n)和gk=0(1≤k≤n)则B∈QR(S)是幂零矩阵. 在式子(1)中,假设fk=0(1≤k≤n)和gk=0(1≤k≤n),由引理1, 则有
布局需要以物料流动为导向,Milk-run需要定制布局,避免长距离、大面积和较长的交付周期。在理想的情况下,每个加工零件都直接用于下一个生产工序,机器之间的运输步骤减少能简化Milk-run系统的使用流程。同时布局必须考虑道路容量,车道需要满足火车的正常行驶和转弯需求。用于存放物料的货架应放置在生产单元附近并与路线相邻,这样就可以让Milk-run司机轻松地把它们装满。除了Milk-run火车本身,提供生产的物料也需要空间。仓库需要提供足够的面积存放火车等运输设备。
以及
取0 下证 对j进行归纳. 当j=5时, 假设aj>0和bj>0对于任意的j 且 由归纳可知,当5≤j≤n-3时,aj>0和bj>0. 因为 从而an-2>0,bn-2>0,所以an-1>0,bn-1>0. 接着考虑 因此 由C∘ST=0,可知c1, i=0(i=1, 2,n-1,n),ci-1, i=0(i=2, …,n-1),c2, i=0(i=1, …,n-2,n),ci, n=0(i=3, 4, …,n-2,n-1),cn-1, n-1=0. 又因为CB=BC,CB的第一行和BC的第一行相等,则 所以,c1, i=0(i=3, …,n-3,n-2),c2, n-1=0. 则c1, i=0(i=1, 2, …,n-1,n),c2, i=0(i=1, 2, …,n-1,n). 依次类推可得,ci, j=0(i=3, …,n;j=1, 2, …,n). 因此,C=0. 由引理1可知,Ray模式矩阵S是谱任意的. 从而定理得证.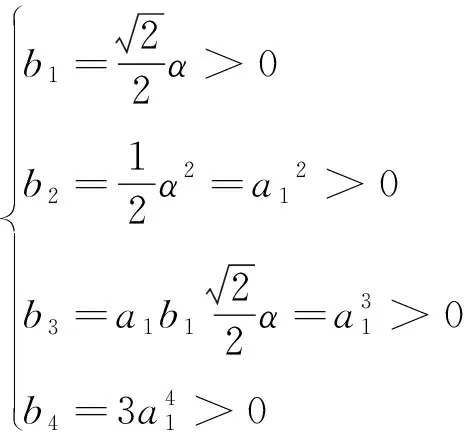

 猜你喜欢
黑龙江大学自然科学学报(2022年1期)2022-03-29小猕猴智力画刊(2021年11期)2021-11-28河北理科教学研究(2020年1期)2020-07-24中等数学(2019年8期)2019-11-25中学数学研究(广东)(2018年13期)2018-08-11新高考·高二数学(2017年6期)2018-03-29中等数学(2018年12期)2018-02-16能源(2017年5期)2017-07-06中国科技信息(2016年15期)2016-11-04中国卫生(2015年2期)2015-11-12
猜你喜欢
黑龙江大学自然科学学报(2022年1期)2022-03-29小猕猴智力画刊(2021年11期)2021-11-28河北理科教学研究(2020年1期)2020-07-24中等数学(2019年8期)2019-11-25中学数学研究(广东)(2018年13期)2018-08-11新高考·高二数学(2017年6期)2018-03-29中等数学(2018年12期)2018-02-16能源(2017年5期)2017-07-06中国科技信息(2016年15期)2016-11-04中国卫生(2015年2期)2015-11-12
