
电磁波测距高程导线应用及分析
2018-11-02 05:23张金辉
测绘工程 2018年11期
张 勇,刘 江,张金辉
(1.信息工程大学 地理空间信息学院,河南 郑州 450000;2.河南恒星工程管理有限公司,河南 郑州 450000)
在国家三四等水准测量中规定:在几何水准测量有困难的山岳地带以及沼泽、水网地区可使用电磁波测距高程导线进行测量[1]。多数文献从误差来源及传播的角度进行分析,讨论出消除或减弱误差的方案。由于全站仪的发展和普及,测距和测角不必再进行归心计算,而且目前测角精度普遍达到了1″、测距精度更是高达1/10万以上[2]。如果使用特制的设备,不少学者甚至开始探讨这种方法替代二等水准测量的可行性[3]。由此地矿产业部制定了“光电测距高程导线测量规范”、原总参谋部批定了“军用电磁波测距导线测量规范”。一些内外业人员也提出了观测及数据处理中需要注意的事项[4],这些行业规范和文献提供更详尽的作业方法及设备选型,为测距三角高程替代等级水准测量提供支持。
1 电磁波测距高程导线隔点设站法
在三角高程中,以垂直角及距离计算出水平视线高度,因此特制了觇牌进行照准和测距,如图1所示。参照水准测量中的双转点法,在觇牌上标出上、下两个照准标志,必要时进行单程双测,在觇板的下面安装了一个用于测量距离的棱镜,当距离测出后需归算至照准点。
隔点设站法如图2所示,全站仪放置在前后觇牌的中间位置O,设仪器高为i;仪器分别测前后垂直角为α1,α2;距离为S1,S2;前后照准标志高为a1,a2;依椭球上三角高程仪器O至标志点1的高差为
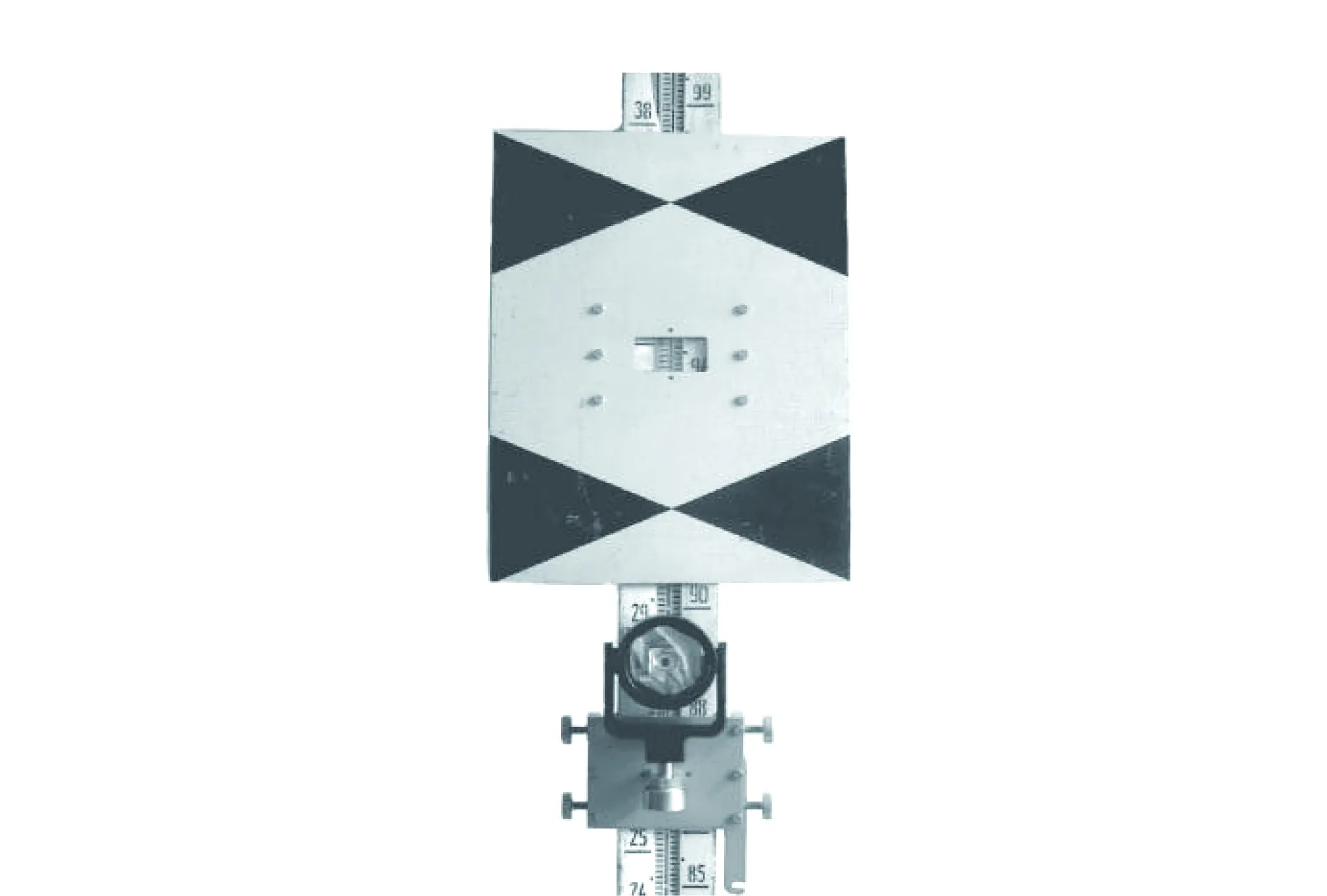
图1 军标中特制觇牌

图2 全站仪三角高程隔点设站原理
可求点2的高差为
h12=-h01+h02=-S1sinα1-
大气垂直折光影响与距离和垂直角关系密切,对于短边测量,大气垂直折光不是主要的[5]。特别是规范中规定了作业时垂直角不得大于15°,另外仪器设置在中央位置,因此两项气球差可认为近视相等,简化得到第一站高差:
h12=S2sinα2-a2-S1sinα1+a1.
不改变觇牌高且交替前进,第二站高差为
h23=S4sinα4-a1-S3sinα3+a2.
如果设计为偶数站,推出整个测段
h=∑S偶sinα偶-∑S奇sinα奇.
在实际作业中消除量高误差,仅测垂直角和距离,测量速度很快。
2 观测用电子手薄设计
依照规范,在进行单程双测时,一站需要采集超过100个各种数据。测回间需要计算指标差,垂直角也要进行约束,距离需进行气象改正、归算,计算量比较繁琐,编写了一套基于Windows mobile平台的软件进行数据自动采集及控制,硬件平台采用天宝junoSB电子手薄如图3所示。
图3 天宝juno SB
电子手薄软件开发环境为Visual Studio 2008,使用SDK版本为6.0、C#语言、SQL数据库、徕卡系列全站仪,接收数据结构采用徕卡GSI。 软件主界面如图4所示。
图4 软件主界面
“新建项目”主要是为了录入观测者、仪器型号、仪器常数、点名等信息。“通讯设置”需要设置串口参数与全站仪输出一致。在“数据管理”中可以实现查看、导出、设置项目等功能。开始测量后,
先录入温度、气压,然后进行斜距的测量,最后角度观测。角度观测中,若同一目标的4个测回角度及指标差互差超限后可补测。在测量中有语音提示,不再需要另配记录员也可完成作业。
另外,数据导出可生成打印版式直接打印。
3 测量质量及效率
随机选取了66条路线,其中最长的路线达到了46 km,最多测站路线有305站。最短路线只有4个测站,2 km。共2 085个测站进行了数据分析,这些数据分布我国中、东、南地区,具有一定的代表性,见表1。
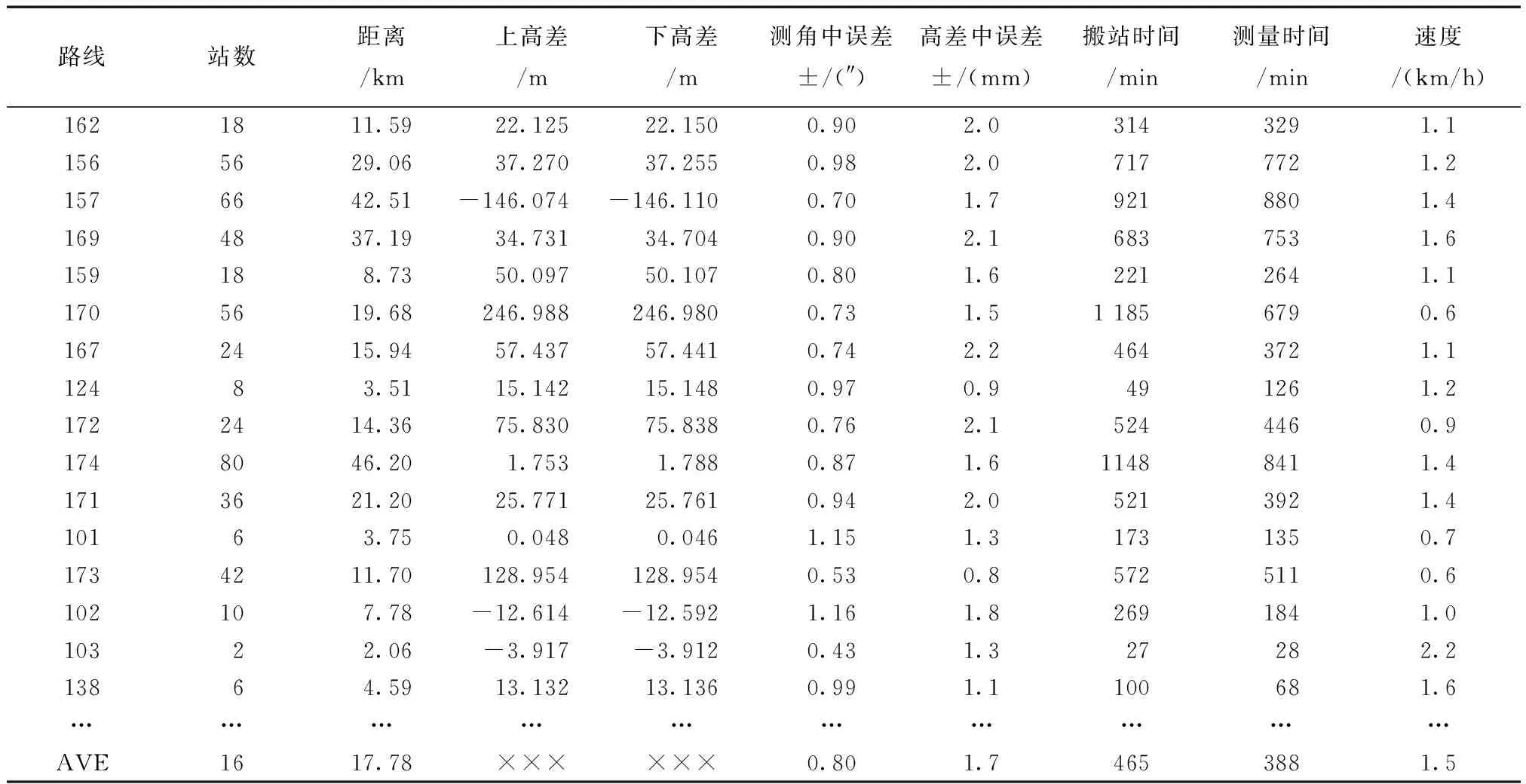
表1 部分路线数据统计
3.1 每km高差中数的偶然中误差
往返测较差可以评估水准测量的精度,以路线上标志高差与下标志高差为双次观测值:
式中:Δ为上下标志高差之差;R为测段长度,千米单位;n为路线数。
3.2 与已知水准路线比较
已知水准点作为起始点时,需要检核此水准点与邻近的水准点高差是否变化,此时检测路线只对上标志或下标志进行单测。若超限认为已知位发生位移,剔除此类点,由于符合的水准点一般等级较高,检测合限即认为已知高差为真值见表2。
由真误差计算每km高差全中误差:
式中:WT=[W1,W2,…,Wn],Wn为闭合到水准点上的高差之差;N为路线数;由于各条路线不相关,权逆阵Q-1为对角阵,其中对角元素为各路线的长度F
观测结果对比如表2所示。
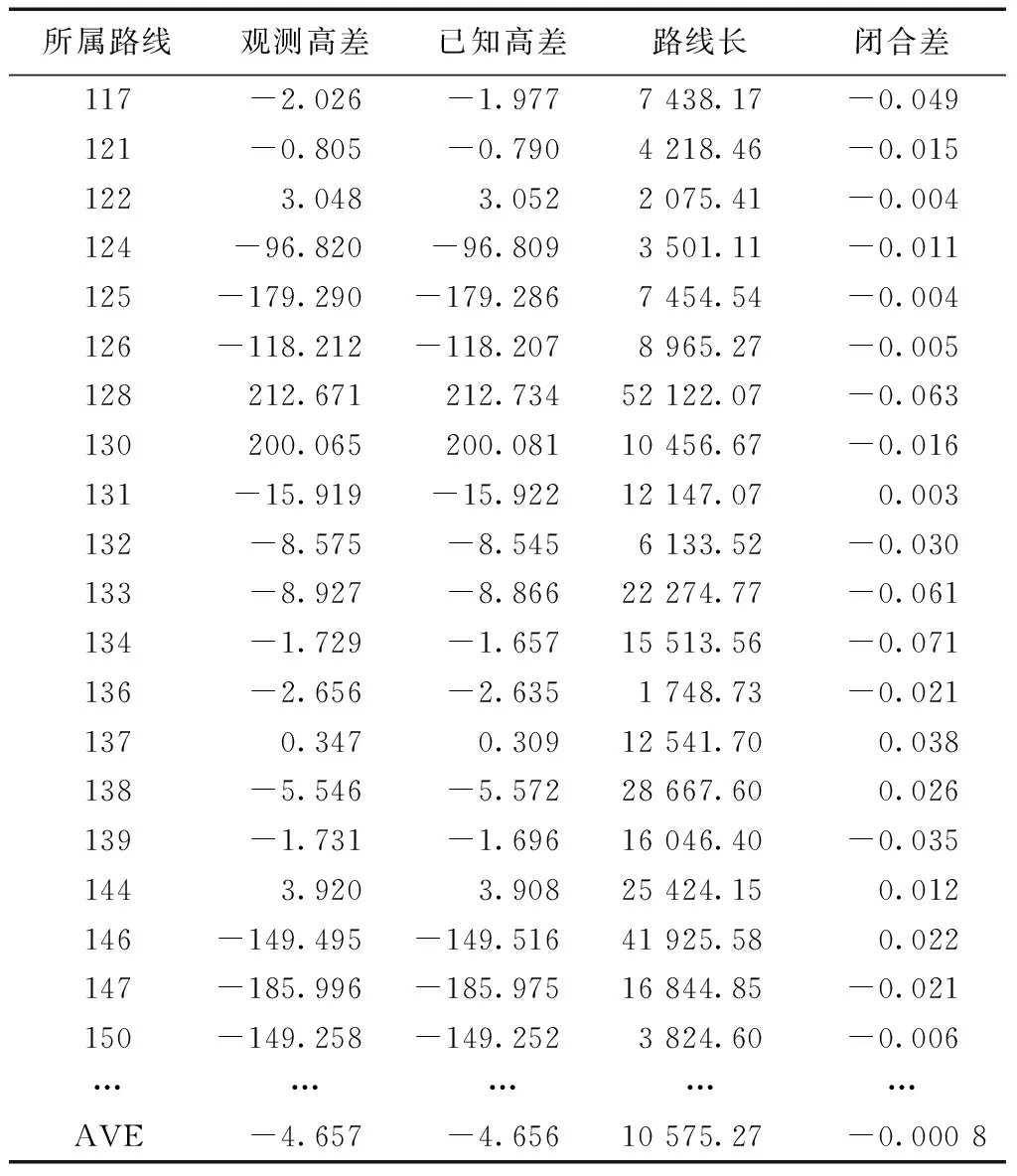
表2 部分检测路线闭合差 m
全中误差包含有系统误差、观测误差,精度指标低于高差中数中误差,但真实反映了三角高程的精度。
3.3 测角中误差
由于每个目标垂直角存在多测回观测,可由贝塞尔式求出测角中误差:
式中:[vv]为各方向的各测回观测值改正数v的平方和;n为方向数,每站前后上下共4个目标;m为测回数,规范中取4个测回。
每站的测角中误差不具备代表性,每个测站的测角中误差应取平均值。
计算路线的测角中误差为±0.8″。
测角中误差反映了测量员的观测水平、成像情况、仪器精度。通过对各个路线的测角中误差分析,TS30和TC1201(未列出使用仪器型号)虽然标称精度为±0.5″和±1″,但表现出来的测角中误差优劣不明显。
3.4 测量速度
对2 085个测站进行时间统计,得出平均观测时间为12.6 min,绝大多数测站观测分布在10 min左右。平均搬站时间为15.4 min,测量速度约1.5 km/h。对比三四等水准单程双转点法:山区速度约为0.5 km/h、交通便利达到1 km/h,速度优势明显。

图5 每站观测时间和测站个数
4 结束语
电磁波测距导线作为一种测定高差的技术方法具有精度高、速度快,特别是可机械化前进作业。文中只分析到了这种方法的精度和速度,实际上还有很多测量规律待挖掘,比如:通过电子手薄气象条件、时间的记录可以对大气垂直折光进行研究;分析测站垂直角大小对高差精度的影响;在测量的水准路线上,如果每觇牌加装GNSS来获取大地高,可建立高程异常线性模型为GNSS高程提供支持。
猜你喜欢
地理空间信息(2022年11期)2022-11-26
测绘地理信息(2022年2期)2022-04-02
煤气与热力(2021年10期)2021-12-02
陕西水利(2021年5期)2021-06-21
装饰装修天地(2020年11期)2020-07-04
铁道勘察(2018年5期)2018-10-22
航天电子对抗(2018年3期)2018-07-14
城市勘测(2018年1期)2018-03-15
航天电子对抗(2018年6期)2018-03-04
房地产导刊(2015年6期)2015-10-21
