顾及水域的QuickBird影像阴影检测方法研究
2018-11-02 05:34:48谢亚坤冯德俊王垠入
测绘工程 2018年11期
谢亚坤,张 珩,冯德俊,李 强,王垠入
(1.西南交通大学 地球科学与环境工程学院, 四川 成都 611756; 2.西昌学院 土木与水利工程学院,四川 西昌 615000)
近年来,高分辨率遥感影像以其直观准确、高分辨率、更新迅速等优点使得其应用越发的广泛。空间分辨率的大幅度提高,使得影像中的地物信息更加清晰、丰富,然而由于阴影的存在,严重影响图像判读、目标提取、变化检测等的正确性。因此,影像中阴影的检测是对阴影去除及利用的关键。
高分影像中阴影的检测方法主要分为两种:一种是基于模型的检测方法,该方法需要获得较多的先验知识,如产生阴影物体的几何形态、太阳方位、DSM数据以及传感器相关参数等知识来进行阴影提取,具有较大的局限性[1-2];另一种是基于阴影性质的方法,通过区别阴影区域与非阴影区域在亮度、色彩、纹理等方面的差异进行阴影检测[3]。文献[4]通过建立HIS模型由阈值分割实现阴影的检测。文献[5]通过蓝绿波段特性构造比值,并结合能量信息补偿方法分离阴影与非阴影区域。文献[6]根据C1C2C3色彩空间不变特性中的C3分离出阴影与黑色区,并结合方差做纹理滤波提取阴影实现阴影边界的提取。文献[7]根据阴影区域HIS特性结合数学形态学实现阴影区域的检测。文献[8]利用YIQ构造比值运算并结合Otsu阈值法实现阴影区域的提取。文献[9]通过构建谱间关系并建立水体实现阴影区域的提取。通过对以上的阴影检测算法分析研究,发现相关算法对特定的影像效果较好,但仍存在一些不足之处。
为较好的检测阴影及消除水体对阴影检测的影响,本文根据波段比模型原理,结合影像特征分析其多波段灰度值差异,构建阴影检测方法。通过大量的实验表明,该方法针对于QuickBird具有普适性,且计算过程简单,具有很高的提取精度和提取效率。
1 阴影特性分析
Quickbird设有全色和多光谱影像,全色地面分辨率为0.61 m,多光谱地面分辨率为2.44 m,包括蓝、绿、红和近红外4个波段[10]。对研究区Quickbird多光谱影像中典型地物的灰度值(Digital Number,DN)进行统计分析,统计结果如表1所示。

表1 阴影及相关典型地物灰度值
对Quickbird多光谱影像及典型地物灰度值统计分析如图1所示。研究表明,不同地物的灰度值具有如下特征:
1)在蓝、红、近红外3个波段阴影和水体的灰度值低于植被、建筑物、道路等地物,且二者相较而言阴影灰度值更小。
2)阴影及水体在红、绿、蓝3个波段灰度值与近红外灰度值差值相较于其他地物差异更大。
3)对于相同地物绿波段灰度值皆高于其他波段,并且蓝波段灰度值变化范围最小。

图1 阴影及相关典型地物灰度值曲线
2 阴影多波段检测方法
2.1 波段组合
图2(a)为Quickbird影像蓝、绿、近红外波段假彩色影像,在图2(a)中绘制一条折线(由上至下),提取地物灰度值剖面图。结果如图2(b)所示。通过对图2(b)分析,蓝、绿及近红外波段阴影与水体的灰度值要低于其他地物,且在近红外波段由于水体强吸收低反射的特性使得其灰度值略小于阴影。
对于一组数据集可通过均值和方差表示其特征,其中均值表示其集中趋势的量数,标准差则能反应其离散程度。由于不同地物在不同波段灰度值相差较大,其取值范围亦有差异,为更好地进行比较分析,将3个波段放在相同的尺度上来考虑,通过均值和标准差对地物灰度值进行标准化处理[11],将处理之后的值进行累加,更好地突出不同地物之间的差异。构造式(1)对影像进行波段组合处理。
(1)
式中:BC(Bands Combination)为波段变换后的灰度值;B,G,NIR分别为蓝、绿、近红外波段灰度值;μB、σB为蓝色波段灰度值均值与标准差;μG、σG为绿色波段灰度值均值与标准差;μNIR、σNIR为近红色波段灰度值均值与标准差。
经波段变换之后的影像如图3(a)所示,并在图3(a)中绘制一条折线,提取地物灰度值剖面图,如图3(b)所示。从图中可以看出水体与阴影部分灰度值皆为负值,且相较而言阴影区域灰度值小于水体区域。通过波段变换之后可以更好地区分水体与阴影。

图2 蓝、绿、近红外假彩色影像及其DN值剖面图

图3 波段变换后的影像以及DN值剖面图
2.2 多波段阴影指数计算
影像经式(1)进行波段计算,从图3(b)可知,影像中除阴影与水体外的其他地物灰度值皆为正值,通过舍去正值可除去除阴影与水体外的地物。为方便计算再对负值取正,阴影灰度值相较于水体较大,通过构造变换之后的灰度值与近红外波段灰度值的比值凸显阴影与水体。构造多波段阴影指数(Multiband Shadow Index,MSI),具体表达式为
(2)
式中:-BC为经式(1)变换后地物灰度值舍去正值后进行负值取正运算得到的值;NIR为近红外波段灰度值。
经过MSI多波段的变化后,利用直方图阈值分割法通过选取合适的阈值,如图3(b)分析可得阈值范围为2到4。阴影与水体能够很容易的显示出来(见图4)。对于影像中含有水体的区域可将其列为疑似阴影区域,并进行进一步的去除水体。影像中若不含水体,变换后影像经数学形态学处理之后可定为阴影区域。

图4 MSI变换后影像
2.3 构建水体指数WI
Mcfeeters.S.K 提出归一化差分水体指数(Normalized Difference Water Index,NDWI)[12]。如式(3)。利用水体在绿波段反射率高、近红外波段反射率低的特点,将两个波段进行差值和比值运算以增强水体特征[13]。但是NDWI在强化水体的同时,阴影区域也得到强化凸显出来,造成混淆[14]。对影像进行NDWI处理结果如图5(a)所示,并在影像中画折线绘制不同地物灰度值剖面图,见图5(b)。
(3)
式中:G为绿色波段灰度值;NIR为近红色波段灰度值。
通过对影像各波段灰度值的分析,发现阴影区域和水体的灰度值表现为G>NIR,且通过式(1)的波段组合加大水体与阴影的差异,可结合式(2)中的-BC值构造水体指数分离阴影与水体。将感兴趣的地物强反射波段绿波段与近红外波段差值放在分子位置,将处理后的-BC值放在分母位置[15]。由于-BC作为分母值不宜过小,根据图3(b)其值在阴影与水体区域皆大于1,则选取其大于1的部分用于计算。以NDWI为参考结合差值法和比值法,构造水体指数(Water Index,WI),其表达式为式(4)。
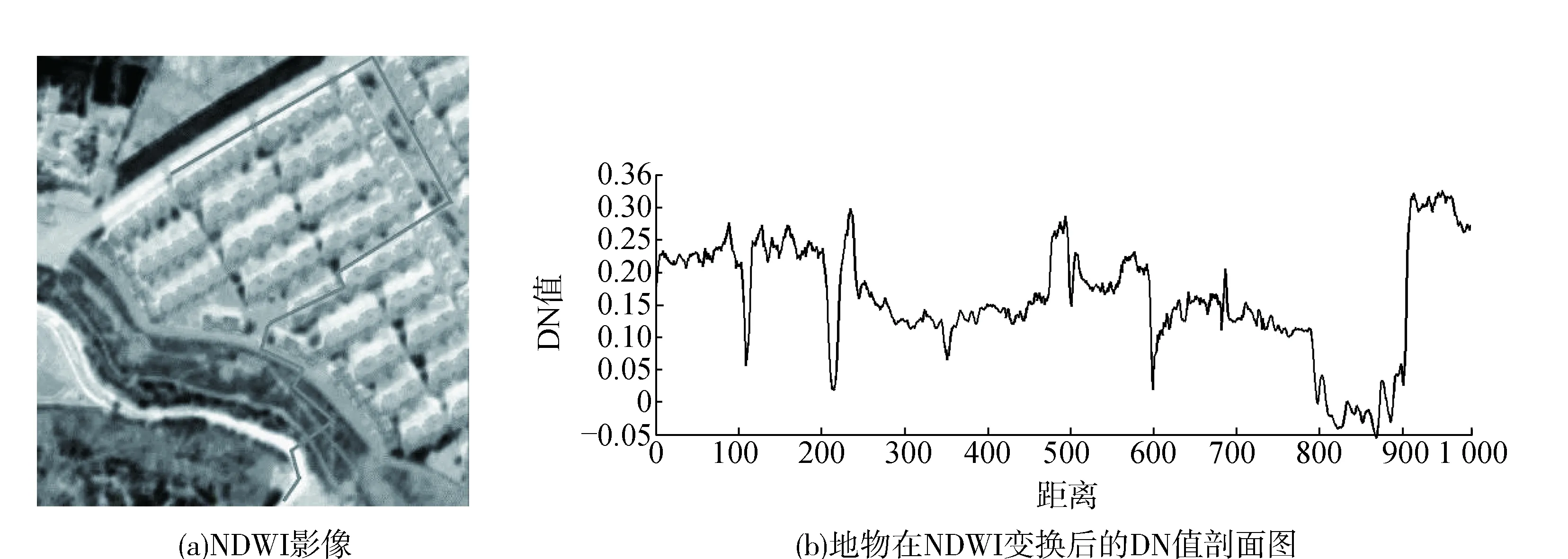
图5 NDWI变换后的影像及DN值剖面图
(4)
式中:G为绿色波段灰度值;NIR 为近红色波段灰度值;-BC为式(1)的BC值舍去正值后进行负值取正运算生成的值。
对影像进行WI处理结果如图6(a)所示,并在影像中画折线绘制不同地物灰度值剖面图,如图6(b)。经WI变换之后水体与其他地物灰度值差异较大,对图6(b)分析可得选取阈值范围为60到100之间即可较好的分离水体。此时水体区域灰度值得到增大,相对于图5(b),阴影与水体有了更为明显的差异,有利于阴影与水体的分离。结果分析WI在提取阴影与水体混合区域的水体时优于NDWI。

图6 WI变换后的影像图及地物DN值剖面图
2.4 检测方法设计
通过对影像各种地物灰度值分析,对影像进行波段运算,构造多波段阴影指数以及水体指数,经数学形态学与布尔运算之后可有效的去除水体并得到阴影区域,其流程如图7所示。
3 实验与分析
为对以上检测方法进行验证,分别从QuickBird多光谱影像,蓝、绿、近红外3个波段合成假彩色影像上截取两个实验区,并根据检测方法通过c#编写试验程序,对两个实验区进行实验和分析。

图7 阴影检测流程
其中图8(a)的实验区一中包含阴影、水体、建筑物、道路、植被等地物,对检测结果进行二值化处理,并用白色表示疑似阴影区域。根据本文方法,首先对实验区一进行MSI变换得到疑似阴影区域如图8(b)所示,然后进行WI变换得到水体区域如图8(c)所示,最后经数学形态学处理后通过逻辑非运算得到去除水体后的阴影区域如图8(d)所示。如图8(d)所示图中存在部分小图斑,与原图对比发现,河道图斑是由于存在河堤和较高树木形成,其他区域图斑是由于较高树木形成的阴影。
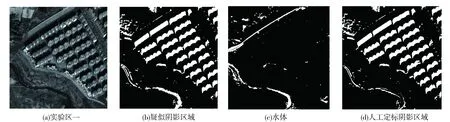
图8 实验区一阴影检测结果(有水体)
实验区二中不包含水体,但仍包含建筑、道路、植被等地物如图9(a)所示。根据以上方法直接对影像进行MSI变换得到疑似阴影区域,并通过二值化处理用白色表示。由于影像中不包含水体则检测出的疑似阴影区域即为阴影区域,如图9(b)所示。

图9 实验区B阴影检测结果(无水体)
为定量对阴影检测结果的精度进行判断,基于本文方法与人工定标方法进行对比分析[16],结果如表2所示,对有水体和无水体的影像阴影提取精度进行分析,其阴影检测精度分别为91.03%、92.31%。由此可得出,本文改进方法对影像中阴影具有很高的阴影检测精度。

表2 阴影检测结果精度评定
4 结 论
本文改进一种使用蓝、绿、近红外波段的阴影检测新方法。实验结果表明该方法能够准确地提取阴影,对于影像中的水体也能够准确地去除。该方法在对已有阴影检测算法分析研究的基础上结合Quickbird遥感影像地物灰度值特性,构造多波段阴影指数,检测出疑似阴影区域,并根据差值运算和比值法构造水体指数,消除水体对阴影的影响,结合数学形态学处理与布尔运算,并通过c#编程实现阴影的准确提取。但由于一些细小阴影不能识别,无法被检测且仍需要创建水体指数才能将水体分离,后续将对这些问题进行深入的研究,进一步提高阴影检测的效果。
猜你喜欢
ELLE世界时装之苑(2024年5期)2024-05-14 09:45:39
文苑(2020年11期)2020-11-19 11:45:11
中国诗歌(2019年6期)2019-11-15 00:26:47
西部资源(2019年2期)2019-11-12 03:33:55
动漫星空(兴趣百科)(2019年11期)2019-11-05 08:26:44
中学生数理化·八年级物理人教版(2017年11期)2017-04-18 11:22:54
高师理科学刊(2016年8期)2016-06-15 20:27:45
数学大王·中高年级(2016年4期)2016-05-14 12:56:02
山西煤炭(2015年4期)2015-12-20 11:36:16
西藏科技(2015年4期)2015-09-26 12:12:58