
基于CAN总线的车辆强制限速系统研究
2018-10-30 03:14田晓鸿
小型内燃机与车辆技术 2018年5期
田晓鸿
(西安航空职业技术学院 陕西 西安 710089)
引言
随着我国经济的快速发展,汽车保有量在较短时间内急剧增加,由此而产生的道路安全问题成为当前十分突出的问题。据相关统计数据显示[1],车辆超速、违章超车、酒驾以及疲劳驾驶等是我国各类交通事故的主要诱发原因,尤其以车辆超速行驶最为常见。对此,广大汽车生产企业及研究机构纷纷展开相关研究。目前,研究热点着重于汽车总线技术以及智能技术的应用[2]。在此背景下,本文设计了一种基于CAN总线的车辆强制限速系统,以期通过智能化的汽车安全系统对车辆行驶速度进行有效控制,解决车辆超速行驶等道路安全问题。
1 CAN总线概述
目前,车载电子控制系统已在汽车行业中逐步普及,通过CAN、LIN等为主的汽车总线,可以将各个车载电控系统整合为统一的网络,还可实现对各车载电控系统的调试、维护及升级。在汽车总线中,CAN(controller area network,控制器局域网络)总线比其他通信总线成本更低,在利用率以及传输速率方面具有明显的优势[3]。由于采用报文传送机制,CAN总线的可靠性更高、灵活性更好。图1为CAN系统结构。
2 基于CAN总线的车辆强制限速系统整体结构设计
本文基于CAN总线而设计的车辆强制限速系统的主要工作原理如下:采用相关传感器实时采集油门踏板、车辆行驶速度以及挡位等信号,并将信号传输至控制芯片;控制芯片基于当前车速与油门比例系数之间的曲线关系,计算出油门比例系数;控制芯片根据油门比例系数对油门踏板信号进行修正,并将其传输至发动机ECU;发动机ECU对车辆行驶速度进行控制,避免车速超过预设值。
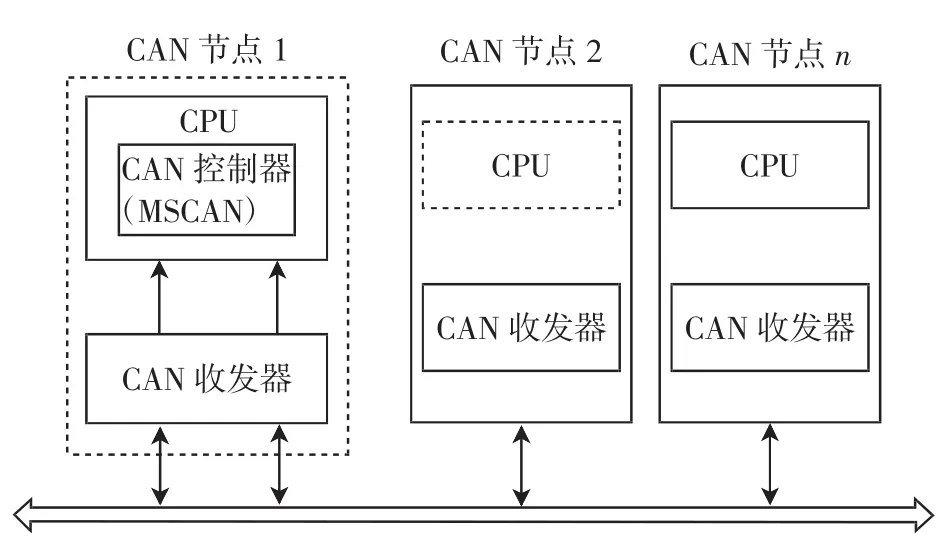
图1 CAN系统结构
本文所设计的基于CAN总线的车辆强制限速系统的结构如图2所示。
从图2可以看出,本文所设计的基于CAN总线的车辆强制限速系统的主要模块包括:传感器、车辆强制限速器以及发动机ECU等。其中,传感器负责实时采集车辆相关信号,并通过CAN总线实现信息共享。车辆强制限速器是该车辆强制限速系统的核心模块,负责将当前车辆行驶速度、挡位等信号传输至发动机ECU,发动机ECU根据这些信号控制节气门开度。

图2 基于CAN总线的车辆强制限速系统结构示意图
3 车辆强制限速器设计
车辆强制限速器是基于CAN总线的车辆强制限速系统的核心硬件,因此,本文重点针对车辆强制限速器进行详细设计。
3.1 车辆强制限速器的硬件设计
车辆强制限速器是油门踏板与发动机ECU之间的联系纽带,本文所设计的车辆强制限速器主要是由主控芯片、CAN收发器、输出转换电路以及电源等模块构成,通过调整PWM波形占空比,调节油门踏板信号,从而间接利用发动机控制节气门开度,限制车辆的行驶速度。车辆强制限速器的硬件结构如图3所示。
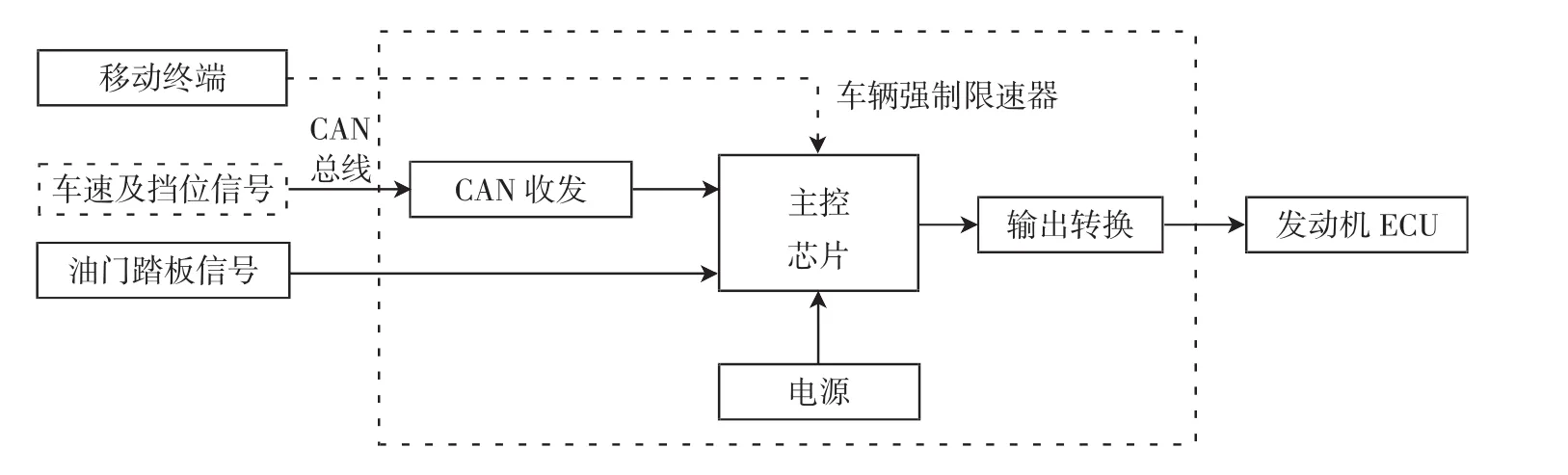
图3 车辆强制限速器的硬件结构
在图3所示的车辆强制限速器硬件结构中,电源负责为其他各模块提供工作电压;CAN收发器负责采集油门踏板、车速等信息,并传输至主控芯片;主控芯片通过对信息进行分析,判断车辆当前是否超速,根据判断结果调节油门踏板电压,并输出计算结果;输出转换电路负责将主控芯片所输出的信号进行D/A转换,然后将其传输至发动机ECU。
3.2 主控芯片的选择
本文所设计的车辆强制限速器的主控芯片采用飞思卡尔公司生产的MC9S08DZ系列的8位DZ60芯片,该芯片在基于CAN的电控系统中已得到较为广泛的应用。MC9S08DZ60芯片的管脚图如图4所示。

图4 MC9S08DZ60芯片的管脚图
3.3 CAN收发器选型及其电路设计
本文所设计的车辆强制限速器中,CAN通信模块主要包括CAN控制器与CAN收发器。由于MC9S08DZ60主控芯片集成了CAN控制器,因此,需对CAN收发器进行选型。
通过比较发现,飞利浦公司生产的PCA82C250芯片能完美兼容ISO11898标准,具有1Mb/s的通信传输速率,并且工作温度上限高达125℃。此外,该芯片还具有防短路、低电流待机等优点。基于PCA82C250芯片的上述特性,本文采用该芯片作为CAN收发器,并设计了相应的硬件电路,如图5所示。
图5中,PCA82C250芯片接收CAN总线上传来的数据,经2N137光耦合器连接MC9S08DZ60芯片的14号引脚,并将数据传输至MC9S08DZ60芯片集成的CAN控制器,完成信息采集过程。
3.4 数/模转换电路设计
本文所设计的基于CAN总线的车辆强制限速系统中,车辆强制限速器对采集到的信号进行存储、计算后输出PWM波形。由于PWM波形为数字信号,而发动机ECU支持模拟信号,需将PWM波形转换为模拟信号。对此,本文以RC电路与双运算放大器芯片共同构成转换电路,如图6所示。
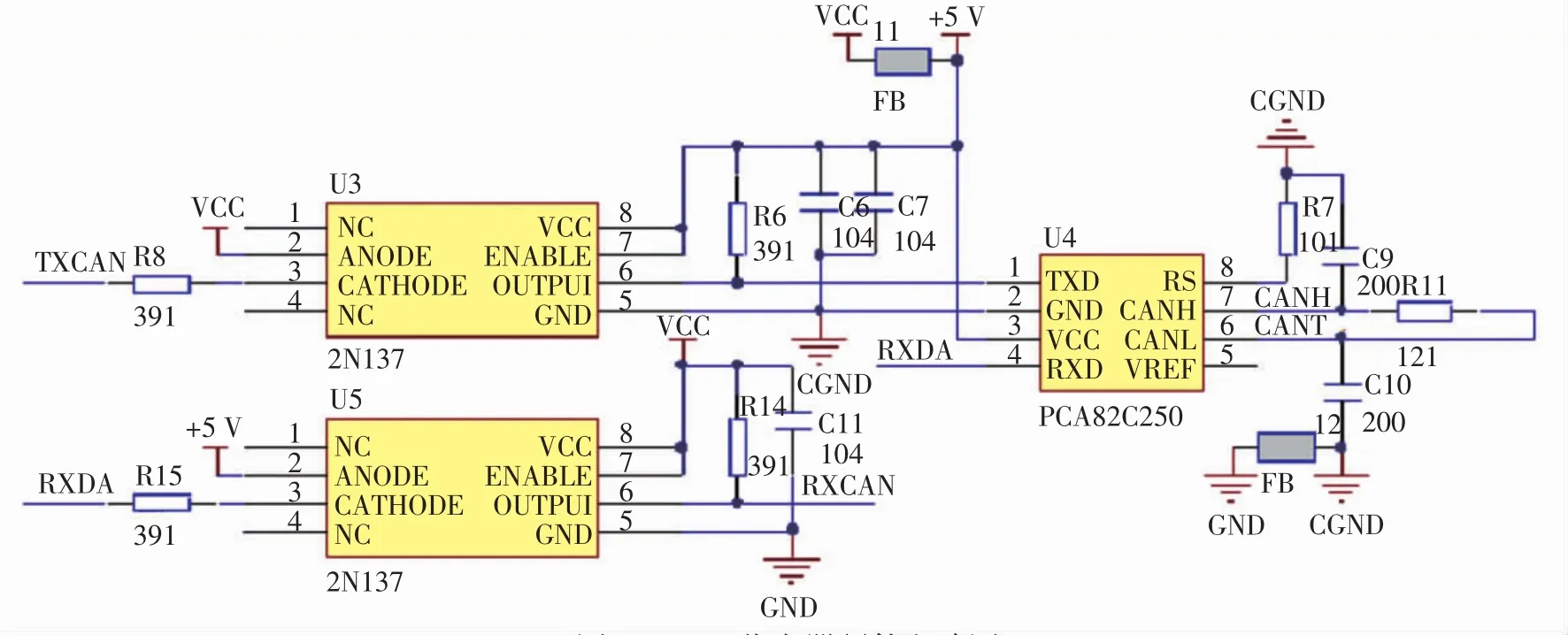
图5 CAN收发器硬件电路图

图6 D/A转换电路
4 车辆强制限速器软件设计与实现
本文所设计的车辆强制限速器的软件部分由主控程序与PC软件构成。其中,主控程序通过模块初始化、功能函数设置等实现车辆强制限速功能;而PC软件仅作为辅助性工具。因此,本文对PC软件的具体设计不再敖述。
4.1 车辆强制限速器软件设计
基于上述各模块选型及硬件设计,进一步对软件部分进行设计。本文所设计的车辆强制限速器的工作流程如图7所示。
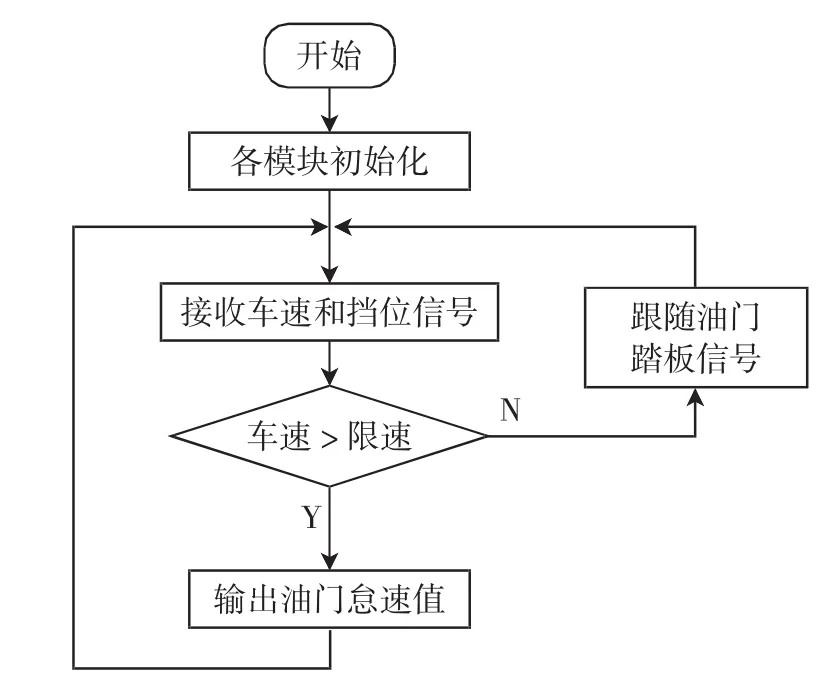
图7 车辆强制限速器的工作流程图
基于上述工作流程,将油门控制情况分为以下3种类型:
1)输出信号跟随当前油门踏板的位置信号;
2)按一定比例修正油门信号的输出模拟量;
3)限速器输出怠速电压以限制车速。
针对上述3种情况,本文所设计的车辆强制限速器通过控制油门比例系数,调节对发动机ECU的输出信号,从而间接控制节气门开度。车辆强制限速器的输出和输入之间的比例关系如下:

式中:A为油门输出信号值;A0为油门信号基准值;kA1为油门踏板所对应的增量值;k为对油门踏板信号进行修正的比例系数。
当前车速v与油门比例系数k之间的关系为:

式中:vS,vS1,vS2分别表示3种情况下的车辆限速值,km/h,三者的值由大到小。
4.2 CAN通信模块软件设计
CAN通信模块的软件设计包括初始化、CAN接收以及CAN发送的相关程序。
初始化程序的主要设计工作是配置CAN控制器的控制、计时、接收中断使能等寄存器,具体如下:
1)进入初始化模式;
2)设置位时间和时间段长度;
3)使能CAN控制器模块;
4)退出初始化,进入正常模式。
CAN接收以及CAN发送采用CAN2.0A/B版本的通信协议,通过报文的形式实现数据传输。具体过程如下:接收缓冲器接收到报文后,若此时接收缓冲器已满,则接收寄存器中的RXF位置为1,MSCAN发出接收中断,主控芯片根据CAN协议解析读取数据内容并保存;若此时发送缓冲器空闲,主控芯片选择发送缓冲器,然后将标识符、控制字符以及数据等存储于发送缓冲器中,同时删除标志位,最终进行报文发送。
5 仿真实验验证
通过仿真实验验证本文所设计的基于CAN总线的车辆强制限速系统的可行性。采用USBCAN-1以及ZLGCANTest模拟实车与车辆强制限速器间的CAN通信,并对车辆强制限速器发送数据,以此构成一个CAN网络。电源方面由微机电源提供。
仿真实验时,设定模拟车速限值为70 km/h,利用ZLGCANTest向本文所设计的车辆强制限速器发送模拟车速等CAN数据。当模拟车速为66 km/h时,控制芯片根据输出油门比例系数与车速之间的函数关系,计算出油门输出的大信号及小信号分别为2.5 V及1.6 V,即此时为第2种油门控制情况—输出电压值跟随输入电压值。通过示波器测得油门输出的实际值分别为2.53 V及1.58 V,可知,误差在允许范围内。
6 结论
本文基于目前应用广泛的汽车CAN总线技术,针对车辆超速行驶的问题,设计了一种主控芯片采用飞思卡尔MC9S08DZ60的车辆强制限速系统。仿真实验的测试结果表明,本文所设计的基于CAN总线的车辆强制限速系统能基于CAN总线实现各模块间的有效通信,并能可靠有效地控制车辆行驶速度,对解决车辆超速行驶的道路安全问题具有一定价值。
猜你喜欢
车主之友(2022年6期)2023-01-30
岷峨诗稿(2020年4期)2020-11-18
网络安全和信息化(2019年5期)2019-12-23
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
汽车电器(2018年8期)2018-08-25
现代电子技术(2017年14期)2017-07-25
黄河之声(2017年13期)2017-01-28
汽车之友(2016年10期)2016-05-16
网络与信息(2009年9期)2009-10-30
