
GNSS-R在车辆探测定位上的应用研究
2018-10-30 03:14曹小英
小型内燃机与车辆技术 2018年5期
曹小英
(西安邮电大学 陕西 西安 710121)
引言
伴随着信息技术的不断发展以及探测目标的多样化和复杂性,传统的GNSS接收机已不能满足目标探测和定位要求。将GNSS-R(global navigation satellitesystem-reflections,全球导航卫星系统反射信号)这一新兴遥感技术应用到飞机、车辆等移动目标的探测和定位上,已成为国内外学者研究的重点[1-2]。本文在对GNSS-R目标探测技术进行概念界定的基础上,通过对GNSS-R目标探测原理进行分析,探索GNSS-R在目标车辆探测应用中的接收和处理方法,促进GNSS-R作为信号源进行目标探测定位的应用。
1 GNSS-R目标探测原理
GNSS是卫星导航系统的总称,包括GPS、北斗、格洛纳斯、伽利略以及相关的增强系统等,具有全天候、宽范围、高时空分辨率、信号源容易获取等特点[3],利用GNSS信号作为辐射源的各项技术及工程已得到大力推广。但GNSS信号必须通过特殊的接收机来接收,并配以相应的算法处理,这种卫星—接收机系统等同于双基地雷达系统。目前,GNSS-R探测技术已成为导航技术和遥感探测交叉领域新的研究重点[4]。
本文探索GNSS-R探测技术对空旷地车辆的探测和定位。将环境设定为空旷、无障碍物的平稳地面。由于空旷平稳地面具有面积广、地表无障碍物等特点,相对于市区街道,GNSS-R反射信号杂波较少,是微波遥感领域的天然试验场。通过对GNSS的直射波和经车辆反射的回波进行接收与处理,使信号变为中频模拟信号,获得目标反射信号的多普勒频移、到达时差以及到达角等相关信息,然后通过直射信号与反射信号协同处理,实现对目标车辆的探测和定位。通过上述研究,为GNSS-R遥感领域在移动目标探测和定位的应用积累经验。
GNSS-R目标探测系统如图1所示。
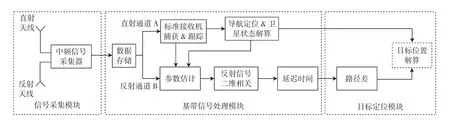
图1 GNSS-R目标探测系统结构
2 GNSS-R在车辆探测中的应用
使用遥感技术和卫星反射信号,在地球上的任何时间和任何地点都能通过一台接收机同时观测到多颗导航卫星。也就是说,只要一台接收机,就可以接收多颗卫星的反射信号,实现对卫星的目标定位,与接收机接收卫星信号的原理一致。基于GNSS-R反射信号的车辆目标探测系统原理如图2所示,图中的虚线和实线分别表示接收机同时接收的直射信号和反射信号。

图2 GNSS-R目标探测系统原理示意图
在地心直角坐标系中,假设4个可见目标车辆的坐标分别为:(Xs1,Ys1,Zs1)、(Xs2,Ys2,Zs2)、(Xs3,Ys3,Zs3)、(Xs4,Ys4,Zs4);目标位置坐标为(Xo,Yo,Zo);接收机的位置坐标为(Xr,Yr,Zr)。1号车辆的反射信号相对于直射信号到达接收机的路径差为:
式中:c为真空中光速,c=3 × 108m/s;τ1为反射信号相对于直射信号到达接收机的延迟时间,s;目标车辆参数可通过直射信号导航电文获得,接收机位置可由接收机的定位解算模块求解得到。
以此类推,可求出其他3辆目标车辆经过目标反射的信号与直射信号路径差方程。
如能找到4辆或更多满足条件的车辆,可用卡尔曼滤波算法、最小二乘法等解算方法更为精确地确定目标车辆位置坐标。若仅有3辆或少于3辆,则仅能获得目标出现的区域范围。车辆越少,该区域范围越大,越不精确。
由公式(1)可知,GNSS-R要进行目标车辆定位,最关键的问题是需要从接收到的信号中求得延迟时间。
图3为目标探测几何关系示意图。车辆到接收机和目标的距离分别为RTR和RTD;目标与接收机之间的距离为RDR;θT为导航车辆视角,是车辆到接收机方向与地平面垂线的夹角;θR为接收机视角,是目标到接收机方向与地平面垂线的夹角。
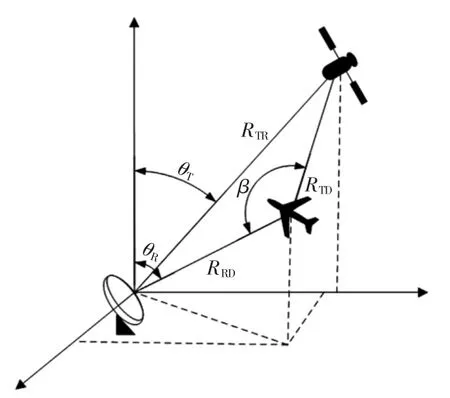
图3 目标探测几何关系示意图
在GPS信号1个C/A码周期(1 ms)内,信号的传播距离为300 km。这个距离对目前使用GPS车辆作为信号源的探测雷达来说,已超出其最远探测距离。因此,可通过直射信号和反射信号相位之差来求解目标车辆与接收机之间的距离。
本文设定探测对象为空旷平稳处停放的车辆,卫星位置图如图4所示。
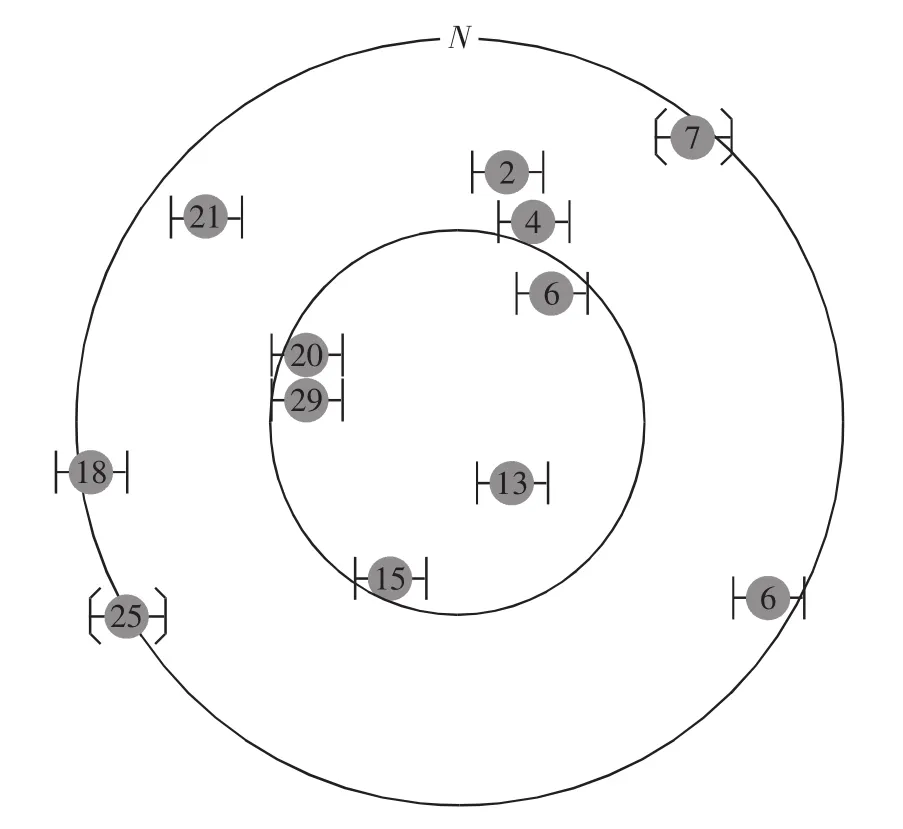
图4 卫星位置图
数据采集设备包括GN2012中频信号采样器、左旋天线、右旋天线及笔记本电脑等。其中,GN2012中频信号采样器的中心频率为4.123 MHz,采样频率为16.369 MHz;直射天线直指天空,为低增益RHCP天线;反射天线直指车辆目标方向,为4阵列高增益LHCP天线;笔记本电脑用于传送和保存由中频信号采集器通过下变频所得到的数字中频信号。实验中,天线在车辆正南面,与接收机直线距离为300 m。
图5为直射信号与反射信号归一化相关峰值对比图。
从图5可知,相比于直射信号,6号车辆的反射信号有较大衰减,且归一化相关峰值延迟316个码片,换算成延后距离约为55 m,理论路径延迟为2×35×cosθ=590.31 m,误差为13.87 m,在测量精度范围之内。
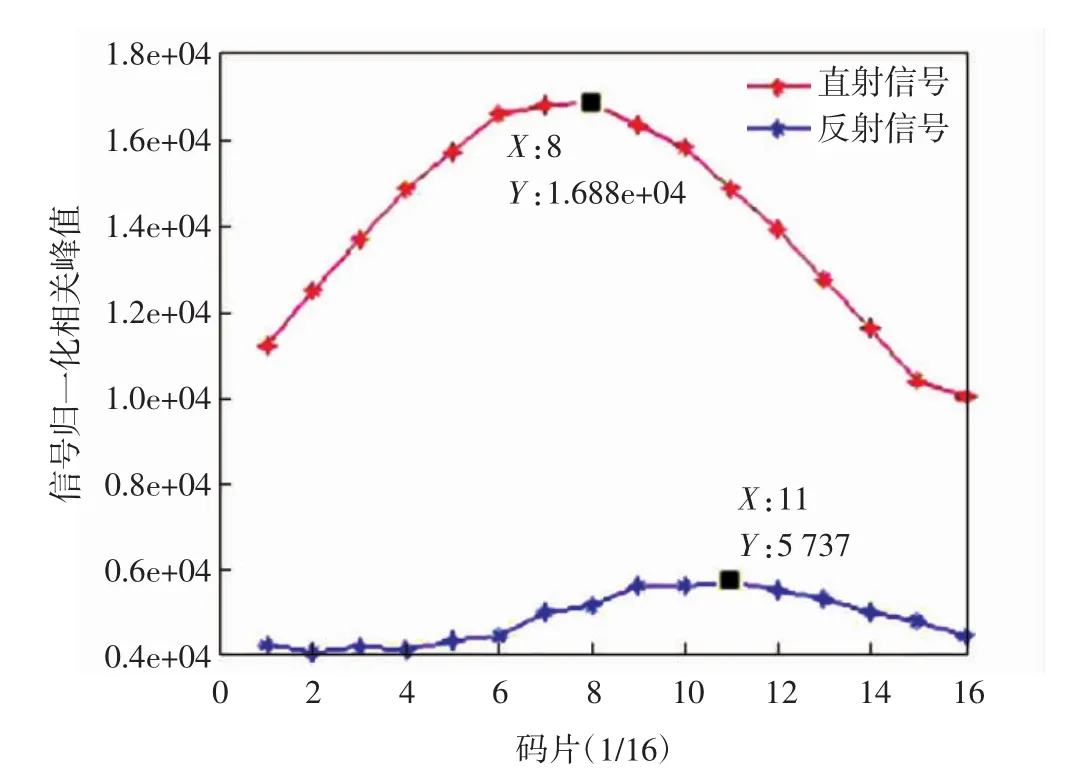
图5 直射信号与反射信号归一化相关峰值对比
3 结论
1)相对于直射信号,GNSS反射信号传播和到达接收机的时间都不同,但精度更高。
2)本文利用左旋天线和右旋天线分别同时接收直射信号和反射信号,通过对捕获到的2路信号进行延迟比对和协同处理,对GNSS直射信号进行导航定位解算,实现对目标车辆定位。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
导航定位学报(2022年1期)2022-02-17
电子制作(2019年24期)2019-02-23
小学生导刊(2018年34期)2018-12-18
电子制作(2018年19期)2018-11-14
中国交通信息化(2017年10期)2017-06-06
电子制作(2016年1期)2016-11-07
电子制作(2016年1期)2016-11-07
山东青年(2016年3期)2016-02-28
母子健康(2015年1期)2015-02-28
