
多源红外弱小目标灰色关联融合识别方法
2018-10-26 05:41顾宪松朱振宇
激光与红外 2018年10期
顾宪松,高 昆,朱振宇,张 鑫,韩 璐
(北京理工大学光电成像技术与系统教育部重点实验室,北京 100081)
1 引 言
从自然地物背景下提取并识别出有效的目标是军事侦察的任务。红外图像具有低信噪比、低对比度、缺乏细节等特点[1],弱小目标的识别难度相当大[2]。针对配准后的中波及长波红外图像,提出了利用基于灰色理论[3]的信息覆盖去描述、分析、综合、处理信息不完全、不确定的灰对象,继而通过计算疑似目标与数据库中样本的灰关联度来得到基本概率赋值的方法[4],并利用D-S组合规则[5]对目标类型进行判决,从而较好地改善了单一传感器识别效率[6]。
2 基本方法
2.1 双红外弱小目标识别流程
图1给出了中/长波红外弱小目标识别的基本流程,主要包括预处理、特征提取、灰关联分析、证据融合等4个基本阶段。
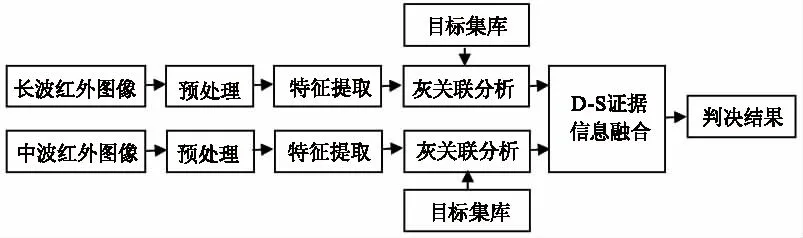
图1 双通道红外弱小目标识别基本流程Fig.1 Fundamental flow of dual-channel small dim infrared target identification
2.2 图像预处理与阈值分割
考虑到红外图像相邻行之间对应地物的温度变化很小,相邻行像素间的灰度有很强的相关性。故如式(1)所示,可以采用行均值相减的方法,来抑制温度场的非线性影响:
(1)
在大部分的连续背景被抑制的情况下,使用传统的基于形态学滤波(如Top-Hat算子)的提取算法容易造成目标丢失[7]。为此,这里对消除背景后的图像进行动态阈值分割以降低虚警率,即首先将图像分为大小为M×N的边缘重叠的子块,对每个子块通过图像的统计特性自适应地计算阈值,如式(2)所示:
(2)

2.3 目标标记与特征提取
对阈值分割后所得到的二值化图像中所有疑似目标进行标记,通过检查各像素与相邻像素的连通性,可以在标记目标所属像素的同时标记目标的单像素宽边界,继而求得目标的面积、质心坐标等特征参数。红外弱小目标的特征体现在两方面[1-2]:
一是目标的形状和灰度特征参量:
1)长宽比:目标最小外接矩形的长度与宽度之比值;
2)质心亮度:假设目标在二维图像中的尺寸为M×N,目标在位置(i,j)处对应的灰度值为f(i,j),则该目标的质心(xc,yc)定义为:
(3)
3)目标面积:目标占据的像素数。
二是构造同时满足目标平移、伸缩、旋转均不变的不变矩。令f(x,y)表示红外图像函数,则其(p+q)阶原点矩与中心矩定义为:
(4)
(5)
由于中心矩仅具有平移不变性,为了得到具有伸缩不变性的矩,定义归一化中心矩为[8]:
(6)
归一化的中心矩μpq具有伸缩不变性,由此构造出最常用的p+q≤3的7个不变矩M1~M7如下[8]:
M1=η20+η02
(7)
(8)
M3=(η30-3η12)2+(3η21-η03)2
(9)
M4=(η30+η12)2+(η21+η03)2
(10)
(11)
4η11(η30+η12)(η21+η03)
(12)
(13)
2.4 基于灰色理论的基本概率赋值
灰色关联分析是根据统计数据的相似程度来判断其关联程度,从不完全的信息中找出最具关联性的主要因素以及次要因素,对于处理小样本、贫信息和不确定环境下的模式识别问题具有独到性[4]。
设X0={x0(k)|k=1,2,…,n}为参考数列,Xi={xi(k)|k=1,2,…,n}为比较数列,记Δi(k)=|X0(k)-Xi(k)|,则X0(k)与Xi(k)的关联系数ξi(k)为[5]:
(14)
(15)
灰关联度反映了待识别目标与第i个目标的相似程度。通过计算灰关联度可以得到Dempster-Shafer(D-S)判据所需的基本概率赋值,再进一步运用D-S证据理论组合规则对多个观测样本的信任度进行合成,得出同一时刻多个传感器所探测样本数据对目标识别的结果。
2.5 D-S证据融合
在决策层融合的各种方法中,Dempster-Shafer提出的证据理论是一种十分有效的不精确推理方法[9]。它采用信任函数来描述不确定性,所以不需要任何先验概率和条件概率就可区分“不确定”和“不知道”[6]。
本文中选取传感器的观测数据,即待识别的红外信号作为参考数列,数据库中的型号数据作为比较数列。首先计算信号观测样本中各个参数的灰关联系数,进而得到观测样本与已知数据库中样本的灰关联度。对于单个传感器,定义基本概率赋值为[10]:
(16)
式(16)中,Ri表示数据库中各种目标类型;U表示不确定的类型。对于双波段红外目标识别应用而言,可以将中波和长波纳入统一识别框架Ω,设m1和m2分别是其对应的基本概率赋值,焦元分别为A1,A2,…,Ak和B1,B2,…,Br,又设:
则可以利用D-S证据合成方法计算出融合后证据的基本概率赋值函数[10]:
(17)
若K≠1,则m确定出一个基本概率赋值;若K=1,则认为m1和m2矛盾,不能对基本的概率赋值进行组合。
双红外图像识别中多个判别证据的组合,可以根据此组合规则对证据进行两两融合。对融合后结果,这里采用了基本概率赋值的决策[10],通过对各个命题的概率赋值结果进行排序,选取Ω中基本概率值最大的两个m(R1)和m(R2),如果满足:
(18)
则接受R1为判决结果,其中ε1,ε2为选取的判决门限。
3 实验结果
3.1 红外图像预处理结果
图2(a)和图2(b)所示的是利用机载中波/长波红外相机对夜晚林地背景下的车队目标航拍的中波和长波红外图像。获取的红外图像已经进行了配准处理,画面尺寸320×240,16 bit量化,地面分辨率GSD=5 m。对其按2.2节中背景抑制和阈值分割后提取疑似目标的结果如图2(c)~(f)所示(α=5.4)。

图2 中/长波红外图像预处理Fig.2 Pre-processing of mid/long-wave infrared images
由图2(c)~(f)可见,Top-Hat这类传统形态学滤波后极易造成弱点目标丢失。相比,本文中提到的利用红外图像的去相关操作很好地抑制了大片连续的背景噪声,同时分块进行基于统计的阈值分割,较好地保留了目标,且保证了二值化图像中只具有很少的虚警点。利用图像的邻域连通性很好地对各个目标进行标注,为后续的特征提取提供了良好条件。
3.2 红外目标特征参量
将红外场景中的目标类型进行了归类,建立了N=6类目标数据库,即识别框架Ω={R1,R2,R3,R4,R5,R6}。传感器的个数为n=2,分别为红外长波传感器和红外中波传感器。对这6类典型目标,分别选取了目标面积(像素数)、质心亮度、长宽比和7个不变矩所构成的中波/长波红外特征参量如表1和表2所示。其中,不变矩M1~M7根据式(7)~(13)求得。
表3所示的是待识别的典型车辆目标的中/长波红外特征参量。
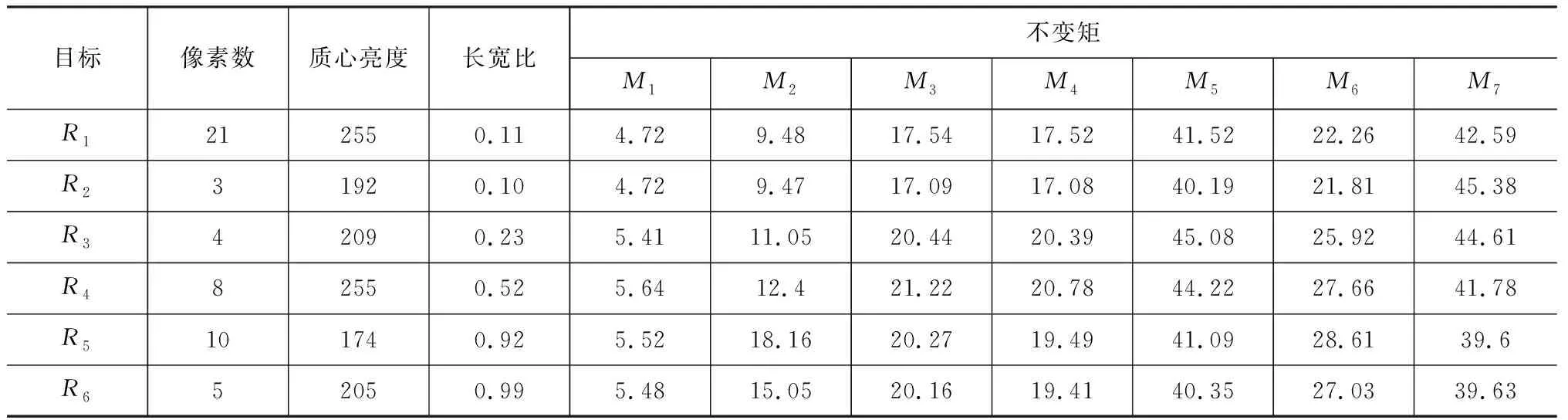
表1 中波红外目标的特征参量
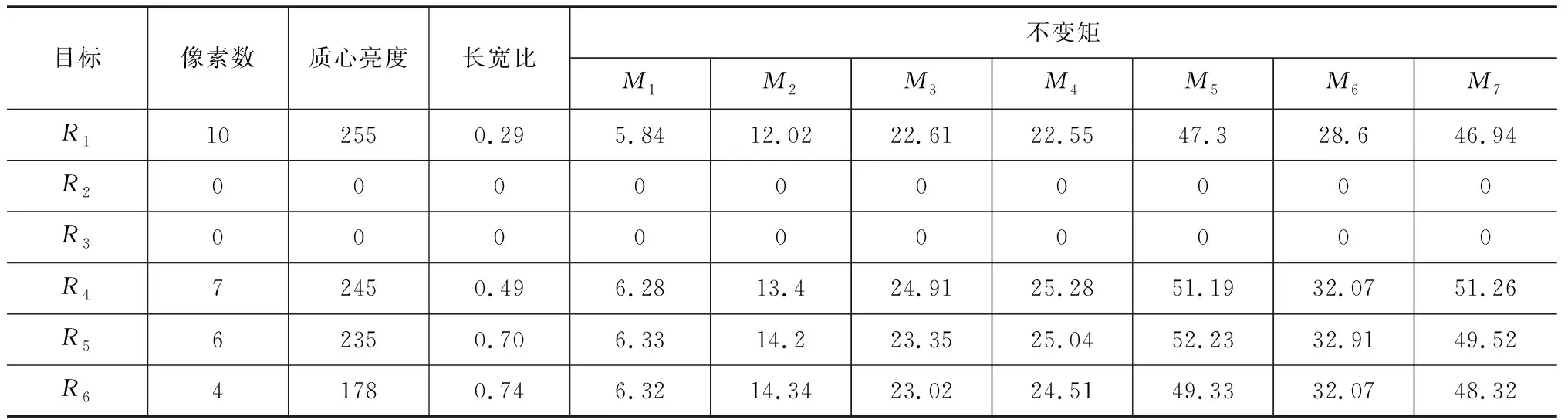
表2 长波红外目标的特征参量

表3 某车辆目标的红外特征参量
3.3 灰色关联融合识别结果
选取图2(e)、(f)中经过阈值分割之后的典型疑似目标(白框所示),根据式(14)、(15),分别求出红外中波图像和长波图像中的疑似目标与数据库中样本的灰关联度,其中ρ=0.2,如表4所示。根据式(16),求出红外中波图像和长波图像各自的基本概率赋值,如表5所示。根据式(17)对针对同一目标,红外长波图像与红外中波图像提供的两条证据进行融合,并对目标进行判决。根据公式(18),取ε1=0.02,ε2=0.05,判断疑似目标为第六类目标,即活动的车辆类目标,这也与现场布设完全一致。
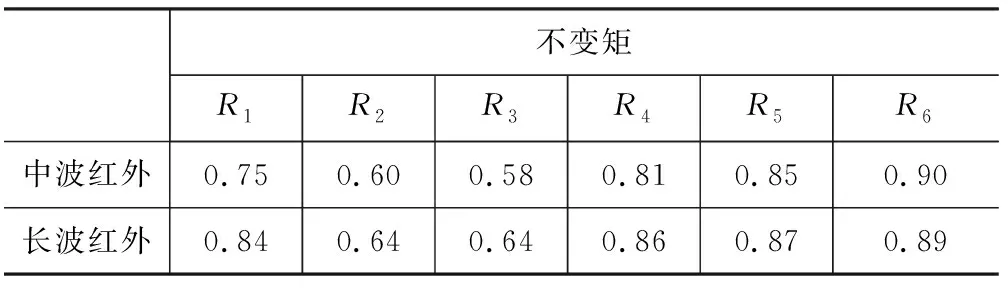
表4 双波段红外疑似目标的灰关联度
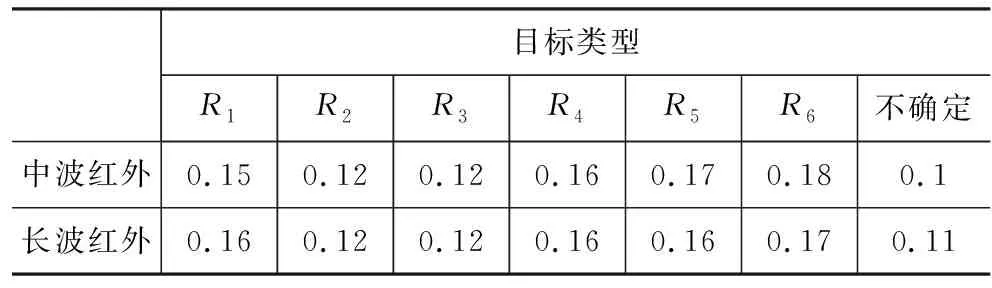
表5 双波段红外疑似目标的基本概率赋值

表6 双波段红外疑似目标D-S证据融合结果
对比表5和表6的结果可以看出,在进行证据融合后,对识别某一类目标的不确定度明显降低,提高了准确识别的效率,这证明利用双传感器的图像融合可以获得比单个传感器更高的识别可信度,这与文献[11]~[13]的分析是一致的。
4 结束语
本文阐述了一种有效且完整的双波段红外弱小目标识别的方法,首先通过改进的行均值相减和分块阈值分割等算法以有效检测出红外弱小目标及其特征,再利用基于灰色理论的目标关联度计算得到基本概率赋值,最后用D-S证据理论组合规则对多个观测样本的信任度进行决策融合,得到同一时刻多传感器探测样本数据的最终识别结果。实验表明,该方法对复杂地物背景下的红外弱小目标具有较高的识别效率。当然,为了建立更完善和可靠的红外目标识别系统,还需要进一步建立确定的模型标准,如针对决策规则的制定,判决门限的取值等,以及进一步研究信息融合中目标集数据库和知识库的建立,以提高未知目标判别的准确性,降低虚警率。
猜你喜欢
数学物理学报(2021年3期)2021-07-19
科技传播(2019年24期)2019-06-15
计算机与生活(2018年8期)2018-08-15
通信电源技术(2018年3期)2018-06-26
消费导刊(2018年8期)2018-05-25
电子制作(2017年8期)2017-06-05
中学生数理化·高一版(2017年1期)2017-04-25
理科考试研究·高中(2016年9期)2016-05-14
中国铁道科学(2015年4期)2015-06-21
中国光学(2015年1期)2015-06-06
