汽车电动助力转向系统控制策略研究
2018-10-22 07:05:34刘成强徐海港
机械设计与制造 2018年10期
刘成强,徐海港
(山东时风(集团)有限责任公司,山东 高唐 252800)
1 引言
随着汽车电子集成化程度的提高和消费者对汽车安全、舒适要求的普遍提升,汽车电动助力转向系统(EPS)成为近年来汽车操纵特性、行驶特性方面的研究热点之一。由于电动助力模式安全性更高,舒适性更好,并且便于维修,对环境更加友好,性能优于液压助力模式,成为未来汽车转向技术发展的必然趋势。一些学者[1-4]针对车辆电动助力转向系统的各项性能进行了广泛的研究。文献[5]对电动助力转向系统的助力控制效果、转向盘回正性以及阻尼控制技术进行了研究。文献[6]对电动助力转向系统的直流伺服系统进行了研究,并根据原有控制模式的不足之处,选用助力和阻尼两种模式相结合的综合控制模式,并提出了关于占空比和控制策略的修正方法。在电动助力转向系统静态特性方面,文献[7]对车辆转向过程中的路感进行了探讨和研究,并用提出用路感强度对转向系统性能行评价和分析。文献[8]运用神经网络对电动助力转向系统助力特性进行了分析。但是仍有一些因素考虑不够全面,例如转向时地面摩擦力的准确模拟、不同道路功率谱密度对转向力的影响及轮胎在不同侧偏程度转向等方面还有待进一步的深入、全面研究。根据电动助力转向系统的物理模型与数学模型,设计了基于助力模式下的常规PID控制策略、模糊自适应PID控制方法以及基于补偿模式下的常规PID控制方法。对比分析不同控制方法的仿真结果,研究了不同控制策略及控制参数对系统的影响,并对基于补偿模式PID控制的电流跟随性和补偿效果进行仿真分析。
2 电动助力转向系统动力学模型
研究中为了降低系统问题的复杂性,将电子助力转向系统简化为只由转向盘助力电机和上、下两端转向轴组成的动力学模型[9],不考虑电机的扭转刚度。
依据速度匹配:

式中:θm—电机转动角度;
Gm—传动比;
θc—前轮等效到转向轴的转角。
分析汽车转向系统传动轴、转向盘可知:

式中:Td—方向盘转矩;
Ks—转向轴刚度;
Jk—转向盘与上转向轴的转动惯量;
θk—方向盘转动角度;
Bk—转向轴与支承之间的阻尼;
Ta—助力矩;
Tr—等效阻力矩;
Jc—转动惯量;
Bc—等效到转向轴的阻尼。
选择的轮胎数学模型为:

式中:F—侧偏力;
Th—回正力矩;
d—轮胎纵向拖距。
克服回正力矩是转向系输出力矩的主要作用,为便于分析计算,合理简化问题的复杂性是必要的,故忽略摩擦力矩和转向系惯性力矩,则有:

式中:Gp—转向器传动比。
电动机对转向轴提供的助力力矩Ta可由电动机运行的动力学方程式确定:

式中:Tm—输出转矩;
Bm—轴承阻尼系数;
Jm—系统转动惯量。
3 汽车电动助力转向系统控制策略研究
3.1 助力控制模式下的常规PID控制
通过控制电机电流输出特性,从而调控电动机所输出的助力转矩,进而实现助力控制。在助力控制模式中,对电机电流采用PID控制的方法,并且在电机功率驱动模块中设置检测电流模块,用来实时测量电动机的实际电流值,同时PID控制器接收电流传感器电流值的反馈,电动机电流的闭环控制得以实现。由比例积分微分控制原理知:

式中:Im—电机助力需求电流数值量;
Kp、Ki、Kd—PID 调节环节的三个比例系数。
3.2 助力控制模式下的模糊自适应PID控制
常规PID控制不能根据不同工况自动调整参数,从而限制了常规PID控制器的应用范围。然而模糊控制则使用语言变量对所控对象进行表达,根据设定的模糊法则和实时状态通过推断获取最优参数,鲁棒性和自适应性较好,但控制的精确度不如常规PID好。所以,如果能把PID控制良好的精确度和模糊控制较好的自适应能力二者相结合起来,通过模糊规则对PID控制器中的参数进行实时自适应调节,则能够一定程度上提高PID控制器的整体性能。因此通过以上分析,结合了准确的控制算法和模糊推理规则,采用模糊PID控制方法,并设计了自适应PID控制器。
在该控制系统中,偏差和偏差变化率作为输入量,通过模糊逻辑来达到不同时刻二者对PID参数自行调整的目的,通过模糊逻辑法则实时对三个系数进行动态调整,在此基础上设计模糊自适应PID控制器。
3.3 补偿控制模式下的常规PID控制
由于车辆选用了电动助力转向系统,所以电机和减速机构将会一定程度上改变车辆的惯性、阻尼以及摩擦,从而会给车辆转向系统整体的动态转向效果和低速回正的能力带来一定的不良影响。因此需要选择合理的控制策略来解决电动助力转向带来的影响。在Simulink环境中建立有效的电动助力转向系统模型,采用对系统进行补偿控制的方式来减少车辆在转向的过程中由于惯性、阻尼以及摩擦引起的不良影响,从而提高车辆的动态转向和低速回正能力。
控制系统中会实时记录驾驶员施加转矩和车速信息,得到补偿电流,两者之和为实际的助力目标电流。同时,系统中的传感器会实时获取电流数值,通过PID控制器缩小实际电流与目标电流间之差,使得系统能够快速稳定。从而得到电动机的控制信号,对电动机助力输出转矩进行控制。
4 电动助力转向系统模型仿真与分析
4.1 Simulink仿真模型的建立
以MATLAB/Simulink为建模平台,实现对EPS的仿真建模。首先将汽车简化为二自由度,设置轮胎负载,并选择匹配的转向器和电动机模型。将模糊自适应理论应用到PID控制方法中,对电流采用反馈控制形式,建立的仿真模型与传统方式有一定区别。设计了四种不同的控制器,分别进行模拟仿真,并对仿真效果作对比分析。图1和图2分别是设计的以助力控制为基础施加模糊自适应PID控制模型和基于补偿控制的PID控制模型。
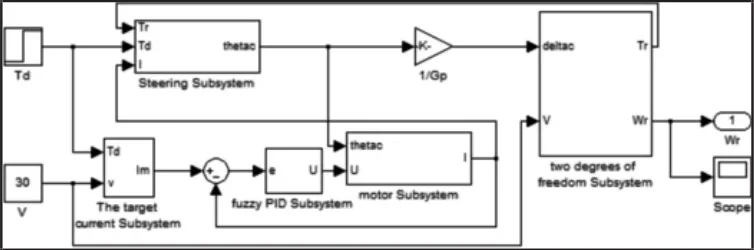
图1 基于助力控制模式下的模糊自适应PID控制策略的EPS模型Fig.1 EPS Model of Fuzzy Adaptive PID Control Strategy Based on Power Assisted Control
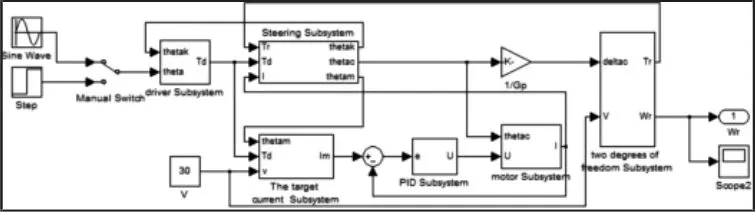
图2 基于补偿控制模式下的常规PID控制策略的EPS仿真模型Fig.2 EPS Simulation Model of Conventional PID Control Strategy Based on Compensation Control Mode
4.2 EPS系统仿真结果及分析
为了提高系统控制的精确度,将以闭环控制的方法对系统进行调控,使差值控制在一定比例,系统的跟踪特性得到了提升。由于通过调节电机电流控制电机输出转矩,因此选择电机电流对助力电流的跟踪效果来评价车辆的转向系统。根据已经建立的MATLAB/Simulink转向系统仿真模型,为验证控制器对目标电流的响应程度和跟踪特性,进行仿真测试[10]。设定车速v为30km/h,对转向盘转矩Td在1s时刻施加幅值为10N·m的阶跃输入,目标电流的跟踪效果,如图3所示。
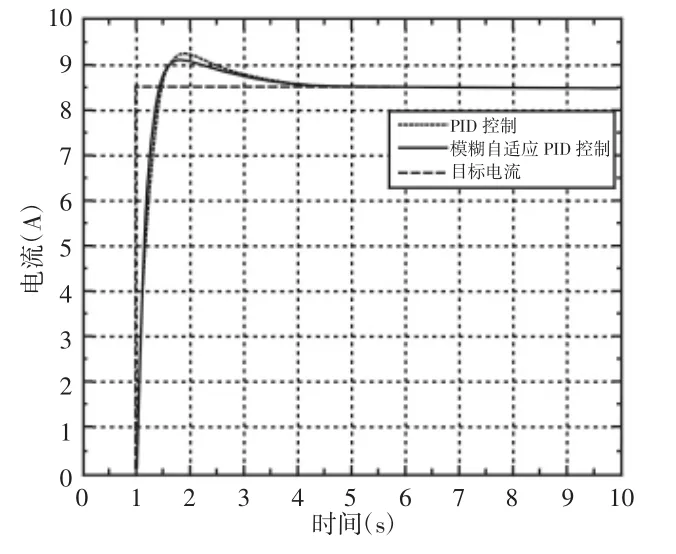
图3目标电流的跟踪效果Fig.3 Tracking Effect of Target Current
图3 显示了模糊自适应PID与传统PID两种不同的控制模式电流跟踪对比,当电机处于模糊自适应控制时电流的超调量、响应速度以及跟踪效果相对更好。
将横摆角速度的瞬态响应选取为评价指标。设定转向盘转矩为10N·m的阶跃信号,车速v设定为30km/h。主要比较三种模式对横摆角速度的调控效果。三者仿真结果对比,如图4所示。
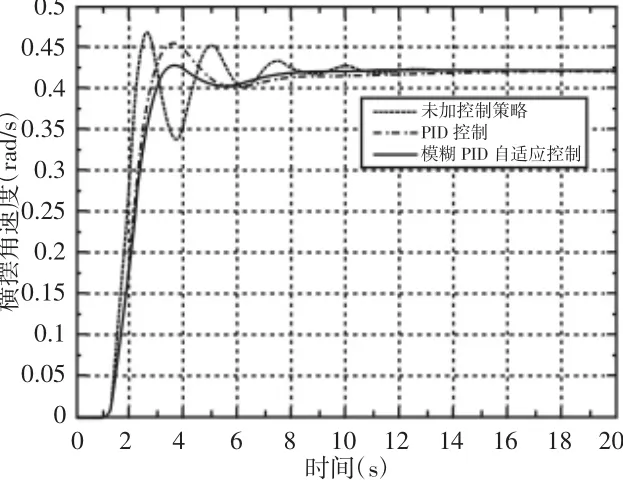
图4 三种EPS系统的横摆角速度响应对比Fig.4 Yaw Rate ResponseComparison of Three EPS Systems
由图4中仿真结果可以看出,在采用的三种EPS控制系统中,性能有较大区别。在反应时间这一指标上不加控制策略的EPS系统中最短,但超调量比较大,上下浮动较大,达到稳定所所经历的时间也比较长;传统PID控制策略下的电动助力系统中,反应时间会相对变长,而系统超调量、波动大小以及进入稳态所经历的时间均相应减小;模糊自适应PID控制方法的电动助力系统中反应时间较长,但是超调量和波动大小与其他两种控制策略相比最小,并且系统最快趋于稳定。综合上述分析,可以得出模糊自适应PID控制模式下的横摆角速度响应效果最好。
首先利用试凑法,将三个参数进行设定:Kp=15,Ki=5,Kd=1。根据上文建立的控制模型,为了验证设计的控制器对电机目标电流的响应速度和跟踪效果,对转向盘施加60°、2rad/s的正弦输入,此时车速为30km/h,对模型实行仿真测试,如图5所示。
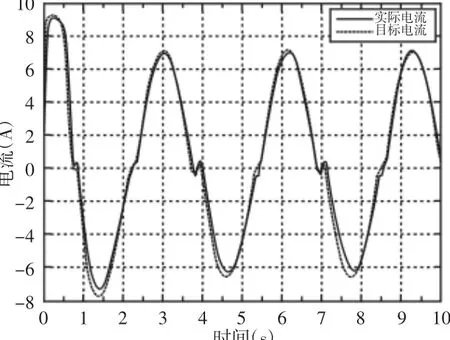
图5 电流的跟随特性Fig.5 Following Characteristics of Current
可见,实际方向盘转矩对目标转矩的响应时间短,超调量小,跟随性良好。为了研究惯性补偿、阻尼补偿和擦补偿对系统的影响,进行模型的仿真分析。
(1)惯性补偿分析

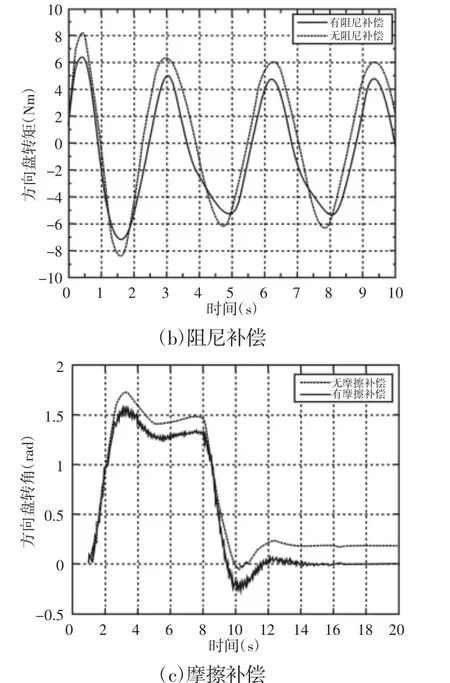
图6 补偿效果分析Fig.6 Compensation Effect Analysis
为了验证对系统施加惯性补偿之后的效果,给转向盘施加一幅度为30°的阶跃输入,此时车速为v=30km/h。二者动态特性对比,如图 6(a)所示。
由上图仿真结果可以得出,在无惯性补偿时,作用于转向盘上的力矩最大值大于10N·m,8s之后才趋于平稳。在对系统惯性补偿之后,性能得到明显的改善,转向盘上的峰值力矩和调节时间明显减小,因此很大程度上提高了汽车在紧急转向情况下的快速响应性和转向轻便性,对提高车辆的主动安全性能有很大意义。
(2)阻尼补偿分析
为了验证阻尼补偿的效果,对转向盘施加60°、2rad/s的正弦,车速仍为30km/h,对比了有无阻尼补偿的转向盘转矩情况,对比结果,如图6(b)所示。由以上仿真结果可以得出,对系统施加阻尼补偿控制后,当转向盘快速转动时其力矩曲线比较平稳,而驾驶员作用在转向盘上的转矩也会减少,很大程度上提高了汽车在快速转向时的轻便性。
(3)摩擦补偿
为充分验证摩擦补偿策略对电动助力转向系统低速情况下回正性能的影响,对转向盘在1s时输入5Nm的阶跃,在4s时输入力矩为零的方波,转向系统开始回正。进行摩擦补偿前后的转向盘转角对比,如图6(c)所示。
由图6(c)显示的仿真结果可以得出,当不施加摩擦补偿的情况下,转向盘不能正常回到中位,控制效果不是很理想;而采用摩擦补偿之后,性能得到了很大的改善,转向盘能够回到中位。
5 结论
(1)通过对助力模式下的不同控制策略模型进行仿真,仿真结果表明:车辆加装电子助力转向系统后,其操纵稳定性与转向灵敏性明显提高,使车辆性能得到显著改善。设计的模糊自适应PID控制器与传统PID控制器相比,响应速度更快,跟踪效果更好,性能更加稳定可靠。
(2)通过对补偿控制模式下的控制策略模型仿真,得到了惯性、阻尼和摩擦补偿效果图。仿真结果表明:惯性补偿改进了EPS系统紧急转向时的轻便性和快速响应;阻尼补偿改善了EPS快速转向的轻便性;摩擦补偿改善了EPS系统的回正特性。
猜你喜欢
数学物理学报(2021年3期)2021-07-19 06:02:32
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:38:02
数学物理学报(2021年2期)2021-06-09 08:54:38
四川冶金(2018年1期)2018-09-25 02:39:26
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
通信电源技术(2016年1期)2016-04-16 04:57:26
数学物理学报(2016年6期)2016-04-16 04:41:06
探测与控制学报(2015年4期)2015-12-15 15:00:56