楼梯清洁机器人防跌落防碰撞研究
2018-10-22 07:05:28赵南生李凌峰
机械设计与制造 2018年10期
张 磊,杨 元,赵南生 ,李凌峰
(1.南通大学机械工程学院,江苏 南通 226019;2.南通大学工程训练中心,江苏 南通 226019)
1 引言
近几十年来,人们虽然试图设计了各类爬楼机器人[1-7],由于结构臃肿或成本高昂,至今未能投入民用。目前机器人的路径规划或移动控制的研究成果几乎都是基于平地机器人的,关于爬楼机器人如何防跌落防碰撞却鲜有报道。清扫楼梯的机器人既需要爬楼,也需要安全地在踏步上来回移动与转身,因此防跌落与防碰撞成为了其需要解决的基本问题。仅有少量研究初步地报道了楼梯清洁机器人如何防跌落与防碰撞[4-6]。
文献[4]设计了一种带L型腿的楼梯清洁机器人能够在楼梯踏步上来回移动,前方设置了两个PSD(Position Sensitive Detector,位置传感器),主驱动轮安装了编码器以测量轮子转动角度。利用PSD与编码器联合信息可调整机器人达到一个合适的姿态确保下楼时不跌落,然而防跌落措施仅限于此。如何在楼梯踏步上移动与转身时防跌落防碰撞等其它关键问题该文并未介绍如何应对。
文献[5-6]各自设计了一种类似结构的轮脚混合式爬楼机器人,其采用轮子与脚部的上下组合伸缩实现上下楼,特点是爬楼平稳。然而其中的传感器主要用来探测轮脚的伸缩位置,确保上下楼的安全与稳定。由于轮脚较多,体积较大,并不能沿楼梯踏步左右来回移动,活动范围比较局限,因此其研究也未涉及楼梯踏步上移动与转身的防跌落防碰撞。
近些年国内的研究人员设计了一些新型楼梯清洁机器人。然而大多的旨在解决机器人的爬楼[7-9],有的只是概念设计[8-9],未见实物实现,因此相关防跌落防碰撞等诸多问题并未进一步深入探讨。
我们研究小组近年来一直致力于设计开发结构更紧凑、成本低廉的楼梯清洁机器人,研究其中的关键技术[10-12]。先后设计制作了升降伸缩式楼梯清洁机器人[11]与平动旋转腿式楼梯清洁机器人[10,13]。这些机器人能够在楼梯踏步上来回移动,在楼梯上防跌落防碰撞的问题突显。旨在以尽可能简单、低成本的方式解决有关问题。
具体研究是基于我们新设计的更为合理的平动旋转腿式楼梯清洁机器人进行。有关该机器人的结构及其爬楼特点,可参考本研究小组发表的论文[13]。
2 问题的描述
(1)楼梯清洁机器人也应具有平地清扫功能,这是因为楼梯周边总是过道或平台等,因此其至少应当类似当前的平地清洁机器人那样具备基本的前方防踏空和障碍物防碰撞的功能。
(2)楼梯清洁机器人应保证下楼(对于楼梯清洁,下楼相比于上楼是更为优先的选择)前不跌落或遇障避让。
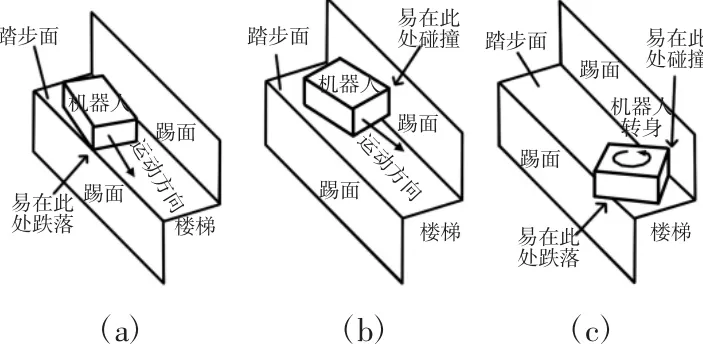
图1 机器人在楼梯踏步上移动时会发生跌落与碰撞的几种常见情形Fig.1 Three Common Cases That Falling and Collision Would Happen when The Robot Is Moving on the Tread along the Riser of the Stairs
(3)楼梯清洁机器人一般应具有在楼梯踏步上来回移动的能力以便完成清扫。因此在狭窄的楼梯上移动或转身时应不发生跌落与碰撞。机器人一般会遇到三种情况,如图1所示。机器人前行时可能从图示处跌落,如图1(a)所示。机器人前行时可能在图示处与楼梯踢面碰撞,如图1(b)所示。机器人转身时可能发生碰撞或跌落的情形,如图1(c)所示。
3 传感器布局
为应对前方防碰撞,类似平地清洁机器人设置了触碰传感器及其接触板,如图2所示。接触板背后有左右两个传感器,以便区别障碍物是来自左方还是右方。

图2 在楼梯踏步上的机器人及其部分传感器的分布Fig.2 Sensor Configuration of Our Stair-Cleaning Robot
为避免前方踏空的危险,传统平地清洁机器人常采用向下探测的光电传感器(含红外式)。然而光电传感器存在对光线敏感的弊端,同时清洁机器人前部下方的扫刷会扬起灰尘,使得光电传感器易粘上灰尘,产生误判。因此考虑使用接触式传感。平动旋转腿式楼梯清洁机器人采用前后万向轮的布局。根据此特点,设计了一种新型的前轮结构,使前轮可上下微动的方式来探测前方的踏空。图3中如果机器人前面路面已空,则前轮会略微下移,进行踏空探测,从而拉动拉杆(或拉线),触发接触传感器,然后可依此控制机器人响应。图3(b)显示了前轮与地面接触时的状态。该方式具有成本低、结构简单、对光线、灰尘状况不敏感,能可靠防止踏空等诸多优点,避免了光电传感器因光线变化误判而导致机器人从前方摔落的危险,因此不失为颇具实际推广价值的探测方式。
对于图2所示的情况,设法让机器人沿平行于楼梯台阶边缘(或者说沿着楼梯踢面)的方式移动,尽量不让机器人与楼梯踢面发生接触。为此,在机器人的两侧各布置了前后一对测距传感器(图2,图4),使机器人与踢面间保持一个间距在楼梯踏步面上来回移动,保证机器人移动与楼梯踢面的平行。这种方式同时解决了机器人在移动时的防跌落与防碰撞。测距传感器实际使用超声波传感器,可进一步避免受扬起灰尘的干扰。而机器人的转身防碰撞与防跌落根据后面提出的方法,还在尾端下方布置了一对接近传感器。

图3 机器人前方内部实物外观Fig.3 Real Appearance of Internal Front of Our Robot
4 防跌落防碰撞的控制策略
以下主要介绍如何使机器人在楼梯踏步上平行于楼梯踢面进行左右移动,特别是如何安全转身。
4.1 机器人侧面与楼梯踢面距离的设定
关于机器人侧面与楼梯踢面的距离一般可简单按如下方式确定。
机器人在楼梯踏步移动时的俯视图,如图4所示。R是扫刷半径;d0—扫刷中心点与机器人一侧的距离;dt—楼梯踏步宽度(也称:踏步深度,depth of thetread);wr—机器人宽度(width of the robot)。为确保扫刷能扫到楼梯踏步面与踢面的交汇处(如图4的AB线附近区域),由图可知,机器人侧面与楼梯踢面的距离dsr(distancefromtherobotsidetothestair riser)应满足:

实际的楼梯易出现(dt-wr)/2>R-d0的情形,此刻我们设定:


图4 机器人在踏步上移动时的俯视图Fig.4 Top View of the Robot Moving on a Tread of the Stairs
4.2 机器人安全转身控制
如何使楼梯清洁机器人安全转身是楼梯清洁机器人防跌落防碰撞的关键难点。
4.2.1 初始转身策略
从图4可见,楼梯只提供了很狭小的空间让机器人转身。如果机器人以简单的原地转身方式,势必碰到楼梯踢面,造成难以转身。其中的原因是人们通常默认的转身是围绕自身的中心进行。机器人若绕其中心点O1转身,如图5(a)所示。由于转身曲率过大,极易使机器人前方顶角碰到楼梯踢面。图中标出台阶踏步面的边缘线和上一台阶踢面边缘线,为简明后面类似图不再标出。此外,粗虚线框代表机器人所处的前一位置(含姿态),深灰颜色框代表机器人运动到当前的位置。后面类似图也是相同含义。

图5 机器人在踏步上初始转身的方法示意Fig.5 Diagram of How the Robot Makes an Initial Turning on the Tread
首先必须增加机器人转身半径,使旋转中心达延伸到如图5(b)的O2点,可使机器人绕该点转动后,其前方左端的拐角C1在移动至图5(b)位置时也恰好不与踢面相碰。以该极限位置的几何关系,确定旋转半径(设符号为Rt,Radiusof turning)。根据图示中的三角勾股定理有:

式中:lr—机器人长度(length of robot).
由此方程可得:

由此确定了初始转身的大半径值。

图6 机器人转身半径调整Fig.6 Radius Adjustment of the Robot Turning
4.2.2 小半径转身的设计
大半径转身一定距离后(由装在底部下方的传感器PA或PB探测结合延时实现,应转入小半径转身,如图5、图6所示)否则有跌落的危险。在研究中一项原则是:宁可发生磕碰,也须绝对避免跌落。所以机器人在转身中应尽可能更靠台阶里面一些。相关对策是机器人在图6(a)中的位置就围绕其中心转身,达到如图6(b)的姿态,这种方式有利于防跌落。当另一后端接近传感器PA探测为空,则停止这一过程,避免后轮踏空。
4.2.3 姿态的最后调整
经过上述过程,虽然机器人已越过最难转身的阶段,剩余的姿态仍需进行适当的调整才可保证机器人后续的安全下楼。
我们的策略是充分利用尾部的接近传感器PA与PB,通过探测遮挡与否,调整机器人边旋转边前后挪动,使机器人渐次达到垂直于楼梯踢面(即尾部边缘线平行于踢面线),如图7所示。有关控制算法如算法1。其中,OPA表示尾部接近传感器探测到的状况,其下标PA表示尾部接近传感器A;OPA=true表示探测到空(无遮挡),否则OPA=false。使机器人前进的车轮转动为正转,反之为反转。
算法1:最后姿态调整控制算法
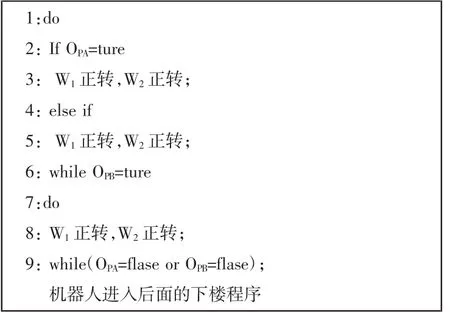
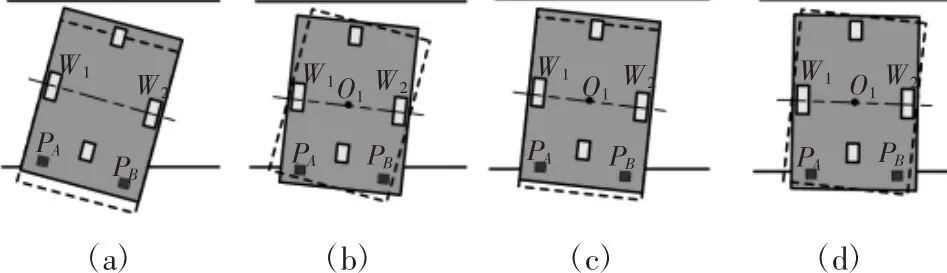
图7 机器人转身的最后姿态调整Fig.7 Ultimate Posture Adjustment of Robot Turning
5 实验验证
为了验证方法,开展了三种实验,第一种是测试前方防跌落;第二种是测试机器人在踏步沿踢面移动时的跌落率与磕碰率,如图1(a),图1(b)所示;第三种是机器人移动至楼梯踏步末端,在前方为空、为墙壁、栏杆等情况下的转身,测试有关磕碰率、卡住率、跌落率与转身到位率,如图1(c)所示。机器人一般遇障碍物避让比较简单,且一般的平地路径规划也已有大量报道,这里忽略。以下每组实验,在三种楼梯下(以A,B,C作为代号)进行,每种楼梯上共做10次,且在不同光线下(下午与晚上)进行;不同的楼梯,颜色、灰尘状况、表面粗糙程度等各不相同。以下实验中,磕碰率,指在机器人某次转身过程中,只要有一次或以上与楼梯发生磕碰,则记为该次转身时有磕碰,这个次数与总转身实验次数之比为磕碰率。发生磕碰是小问题,一般在所难免,但机器人不应由磕碰导致卡住,因此记录卡住率更加重要,卡住率即发生卡住的次数与某组动作次数之比。跌落率是指发生跌落的次数与某组动作次数之比。转身到位指机器人能够从踏步末端开始执行转身动作直至垂直于楼梯踢面,以便进行下楼。转身到位率,即转身到位与总转身实验次数之比。若机器人未能转身至垂直于楼梯踢面的姿态,甚至中途就因误判断或卡住等告失败,记为未能转身到位。
5.1 前方防跌落实验
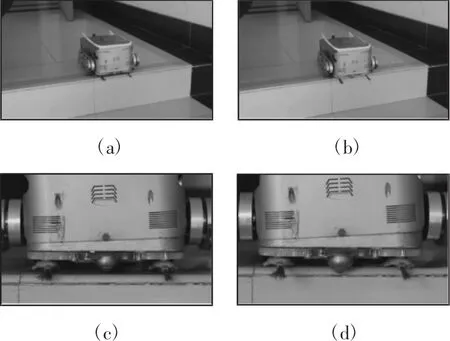
图8 机器人在A楼梯下楼前的前方探测踏空的动作Fig.8 Detection of Stepping on Nothing When the Robot Prepares to Climb Down Stairs A

表1 前方防跌落实验结果Tab.1 Test Results of Falling Prevention When Moving Forward
图8显示了在A楼梯下楼前的防跌落动作,其中图8(c)、图8(d)为特写近景。表1列出了机器人应对A,B,C三种楼梯的前方防跌落的跌落率测试结果。对于三种楼梯,有的虽然两侧均有墙壁或栏杆,但栏杆一侧并非在每一级台阶均安装,有的台阶有一端是空的,机器人仍能成功防跌落,即表1中的踏步末端跌落率为0。通过实验验证了设计的新型前方防跌落结构可以很稳定地对踏空进行响应,使机器人成功撤回,防止跌落,且不受光线、灰尘等条件的影响。
5.2 踏步移动实验
机器人应对A,B,C三种楼梯时,如表2所示。在相应踏步上移动的跌落率与磕碰率结果。从该表不难发现,机器人在A、B两种楼梯的表现谌称完美,但机器人在C楼梯移动时偶尔会调整不及时,造成跌落,与C楼梯踢面也偶尔会发生磕碰。原因可能与我们出于成本选择的廉价传感器对有的材质表面更为敏感有关,造成信号传递存在偏差或滞后。机器人与楼梯发生磕碰并不代表机器人与楼梯发生严重碰撞,因此,实际上该情况不会引起严重后果,不影响机器人的行进。

表2 踏步移动防跌落防碰撞实验结果Tab.2 Test Results of Falling and Collision Prevention When the Robot Moves on the Stair Treads
5.3 踏步上移动至末端转身的实验
第三种实验是机器人完成楼梯踏步的移动后至踏步的末端,在前方为空、遇到墙壁、栏杆等情况下完成转身,准备下楼,如图1(c)所示。测试了整个过程中的跌落率、磕碰率和转身到位率。表3给出了在三种楼梯中的统计结果。
由表3反映,在A楼梯与C楼梯上,机器人表现优良,多次实验也发现,由于C楼梯的踏步宽度稍宽,使得机器人在其上的调整小动作更少,往往能较快转身到位。但在B楼梯上,机器人偶尔发生跌落,有时转身未能成功。原因经研究发现:B楼梯踏步面本身颜色偏深,且踏步上存在黑色斑点,如图10所示。因此在B楼梯的不良现象是因对黑色斑点的伪响应,从而导致动作失误,情况较轻的是转身不到位,严重的会导致机器人错走而跌落。这个问题我们曾经一度以类似防抖动的方法,以多次试探积累进行决策,以提高鲁棒性,但实验表明,其降低了整体动作的效率,且斑点稍大,错误率依然存在,所以设计算法难以明显改善这种误判。研究表明,将黑色与探空进行区别,对于光电传感器(含红外)而言是困难或者不可靠的。今后改进的措施将考虑使用对光线不敏感的传感器。
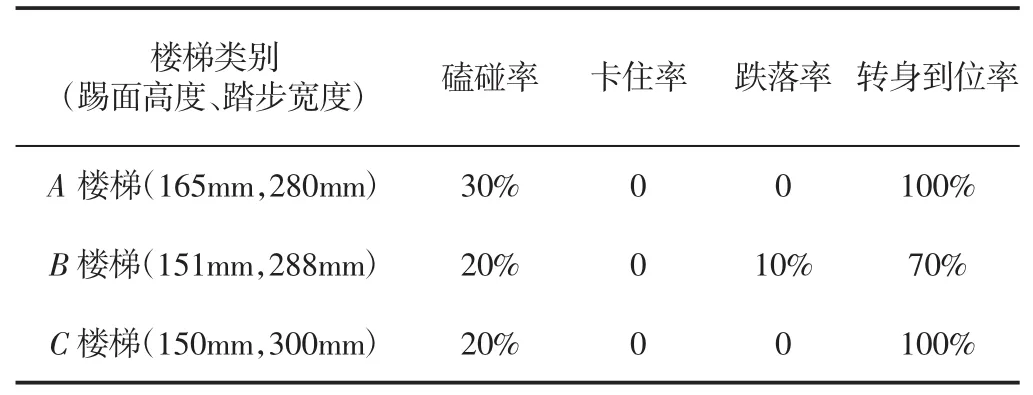
表3 踏步末端转身实验结果Tab.3 Test Results of Turning When the Robot Moves at the End of the Stair Treads
图9显示了光线较暗时,机器人在A楼梯遇墙壁的探测动作以及转身过程。相机自动进行了光照补偿,所以看上去传感器的光更亮了。图10显示了机器人在B楼梯的踏步一端无栏杆处的转身过程。实验还采集了机器人在其它楼梯上的数据与图像,因篇幅所限,不一一列出。实验显示机器人能够应对于不同种类不同条件下的楼梯,完成转身。
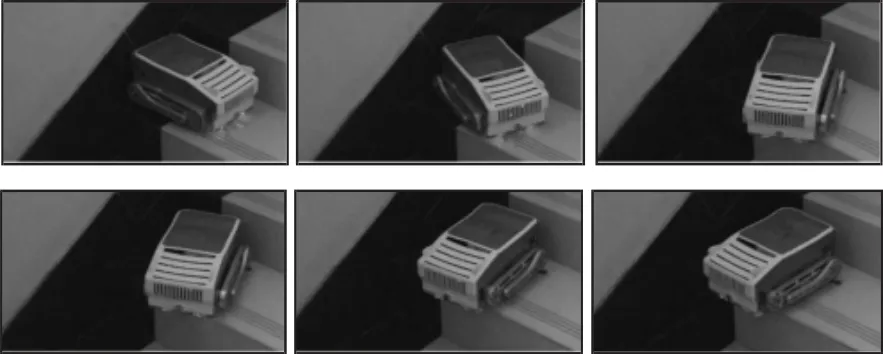
图9 光线较暗时机器人在A楼梯靠墙端磕碰探测与转身Fig.9 Detection of Collision and Turning Under Weak Illumination When the Robot Moves at the End of The Stair Tread of Stairs A That Has Wall
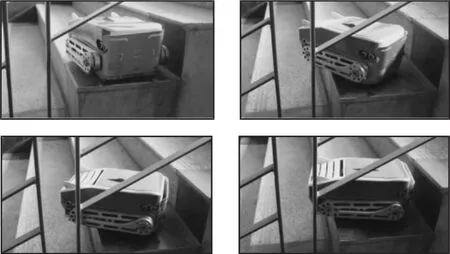
图10 机器人在B楼梯一端为空处的转身Fig.10 Turning State When the Robot Moves at the Non-Railing End of a Stair Tread of Stairs B
6 结论
针对楼梯清洁机器人在楼梯上运动时如何防跌落或防碰撞的问题,基于我们自行设计的平动旋转腿式楼梯清洁机器人平台研究了相关方法。在机器人的前端设计了接触式探测结构,解决了机器人前方避碰问题;针对前方防跌落,考虑到传统光电传感方式对光线敏感、易受灰尘状况影响的弊端,设计了一种新型的接触式踏空探测结构,解决了机器人行进时的前方防跌落,具有可靠性高的优点,是一项颇具推广价值的探测结构;为防止机器人在踏步上移动时的跌落与碰撞,设计了使机器人与楼梯踢面保持平行的左右移动方式;针对机器人在狭窄的楼梯踏步上难转身的问题,提出了一种变半径转身以及边前后挪动边转身的新方法,防止机器人在踏步上转身时的跌落与碰撞,保证转身到位。
实验时选择了几种典型楼梯,在不同光线下进行了实验。实验结果表明,提出的方法能够解决机器人在楼梯上运动时的防跌落与防碰撞问题,虽然存在小的不足,可通过以后在硬件与结构上予以改善。这里的方法可适用于能在楼梯踏步左右移动与转身的机器人,没有基于昂贵的传感与控制器和制作成本,因此对于推动楼梯清洁机器人走向市场具有积极的意义。
猜你喜欢
祝您健康(2024年3期)2024-03-03 13:27:39
机械设计与制造(2018年2期)2018-03-05 12:33:02
青岛画报(2018年1期)2018-02-23 12:07:50
方圆(2017年24期)2018-01-17 20:55:33
文学少年(有声彩绘)(2017年9期)2017-10-23 01:34:45
小布老虎(2017年3期)2017-08-10 08:22:35
小天使·一年级语数英综合(2016年4期)2016-11-19 10:22:17
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08