基于新型趋近律的PMSM超扭曲滑模直接转矩控制
2018-10-20 01:36:34闻振璇张兴军
微特电机 2018年10期
仉 毅,闻振璇,张兴军,王 亮
(1.山东科技大学,青岛 266590;2.山东能源集团山东新巨龙能源有限责任公司,菏泽 274900 )
0 引 言
永磁同步电动机(以下简称PMSM)以其高功率密度、高效率以及高可靠性等优点,在电动汽车、机器人和工业控制等领域具有广阔的前景[1]。然而,PMSM的非线性、强耦合等特性决定了其必须采用先进控制策略如自适应控制、神经网络控制、滑模控制等解决控制系统的非线性、自适应能力差等问题[2]。
直接转矩控制(以下简称DTC)是在矢量控制之后发展起来的,它的控制变量是定子磁链和转矩,不需要进行矢量变换等复杂的运算,且结构简单,动态响应好[3]。虽然传统DTC结构简单,对于参数摄动控制效果好,但是磁链和转矩波动较大,低速时更加难以控制,对系统精度和稳定性控制影响很大[4]。为了解决这些问题,国内外学者提出了诸多的方法,参考文献[5-6]通过增加电压矢量,进而改进开关,但并不能彻底解决引起转矩脉动的问题。文献[7-11]将空间矢量调制(以下简称SVPWM)引入到DTC中,研究表明,此方法对抑制磁链和转矩脉动有较好的效果,而且能够彻底解决逆变器开关频率不稳定的问题。
滑模变结构控制因其鲁棒性强,响应迅速,以及对外界扰动不敏感而备受关注[12],超扭曲滑模变结构控制论是在高阶滑模的基础上发展而来的,该控制方案具有较好的鲁棒性和动态特性。本文将超扭曲滑模控制方案引入基于到SVPWM的PMSM-DTC系统中,同时用饱和函数sat(s)取代符号函数sgn(s),改进了滑模控制的趋近律。由于饱和函数变化曲线平滑,当系统状态点远离切换面时,趋近的速度会大大增加;当系统状态点靠近切换面时,趋近的速度能够缓慢下降。调节控制器的参数,能够使函数工作在线性空间,从根本上解决开关切换的问题,消除了滑模控制中的抖振问题,使系统鲁棒性显著提高[13]。
1 PMSM数学模型
1.1 PMSM在静止坐标系下的数学模型
定子电压方程:
(1)
定子磁链方程:
(2)
电磁转矩方程:
(3)
电机运动方程:
(4)
式中:uα,uβ为定子电压的α,β轴分量;iα,iβ为定子电流的α,β轴分量;Ls,Rs为定子电感和定子电阻;ωe为电机的电角速度;φf为永磁体磁链;θe为位置角;p代表磁极对数;J为转动惯量;B为阻尼系数;TL为负载转矩。
1.2 PMSM在旋转坐标系下的数学模型
定子电压方程:
(5)
定子磁链方程:
(6)
电磁转矩方程:
(7)
式中:ud,uq为定子电压的d,q轴分量;id,iq为定子电流的d,q轴分量;φd,φq为定子磁链的d,q轴分量;Ld,Lq为电感的d,q轴分量。
2 基于超扭曲的滑模变结构控制
2.1 滑模控制器的设计
对于一个动态系统,如下:
(8)
式中:x∈Rn为状态变量;u∈R为控制输入量;y为被控制量的输出;A,B,C为未知函数。
滑模变量的一阶、二阶导数如下:
(9)

(10)
则定义二阶滑模如下:
(11)
超扭曲算法表示如下:
(12)
式中:Kp>0,Ki>0,Kp,Ki为增益;滑模变量s=y。
该控制算法不需要滑动变量的导数,滑模面的收敛性和稳定性的充要条件是增益要足够大[15]:
(13)
式中:CM≥|C|,并且DM≥D≥Dm。同时C和D由y的二阶导数所定义:
(14)
在旋转坐标系下的PMSM矢量模型中,定义式(14)中C=ωeφf-Rsid,D=1,因为电机的电流与转速有限制,则满足式(13)。
定义定子磁链的滑动变量表达式:
(15)
式中:φr是定子磁链。
由超扭曲算法可知,定子磁链滑模控制器的表达式:
(16)
式中:Kp,Ki满足式(13)的收敛性条件。
同样电磁转矩的滑动变量表达式:
(17)
则电磁转矩滑模控制器的表达式:
(18)
2.2 新型趋近律滑模控制器
传统超扭曲算法采用的切换函数sgn(s)是一种不连续型函数,会导致系统出现抖振现象。这里引入饱和函数sat(s)取代函数sgn(s),不仅能保证切换函数的开关特性,同时还能减小抖振和系统的不连续。由于sat(s,δ)·s与sgn(s,δ)·s的符号特性相同,故同样满足稳定性与收敛性条件。
饱和函数sat(s,δ)的表达式:
(19)
式中:δ为较小的正常数,但不宜过小。如果δ取值太小,则会导致抖振问题。所以改进后的定子磁链控制器:
(20)
改进后的电磁转矩控制器:
(21)
3 仿真与分析
借助MATLAB /Simulink仿真工具,对传统PMSM-DTC系统与本文方法进行仿真对比分析。传统PMSM-DTC系统控制框图如图1所示;基于新型趋近律的超扭曲滑模的PMSM-DTC系统控制框图如图2所示。

图1 PMSM-DTC系统控制框图

图2 基于新型趋近律的超扭曲滑模的PMSM-DTC系统控制框图

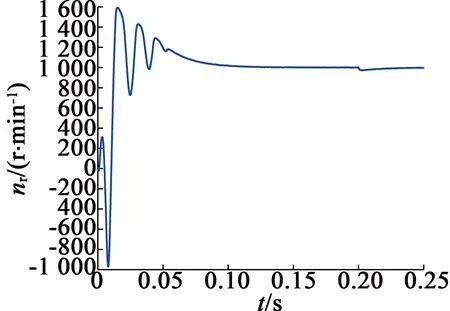
图3 PMSM-DTC系统转速响应图
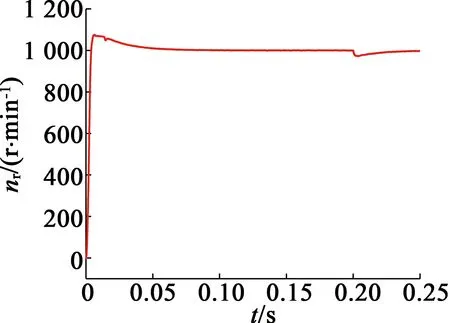
图4 基于新型趋近律的超扭曲滑模的PMSM-DTC系统转速响应图

图5 PMSM-DTC系统转矩响应
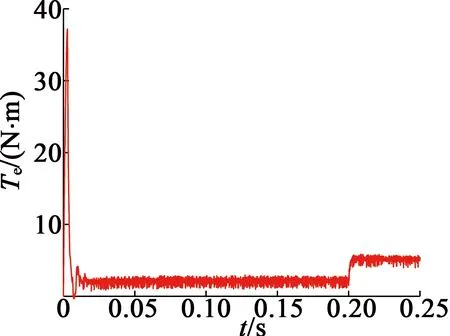
图6 基于新型趋近律的超扭曲滑模的PMSM-DTC系统转矩响应图
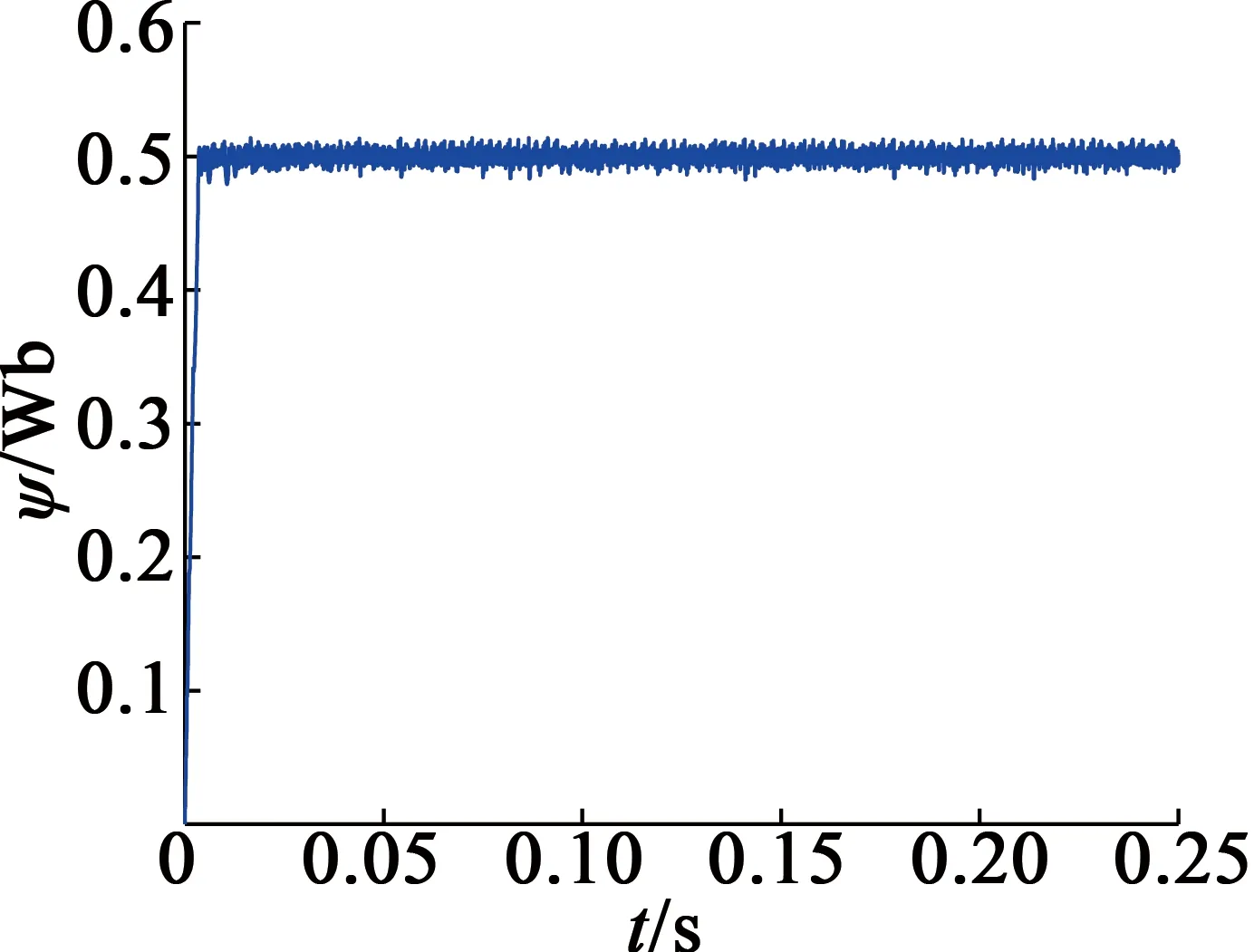
图7 PMSM-DTC系统磁链响应图
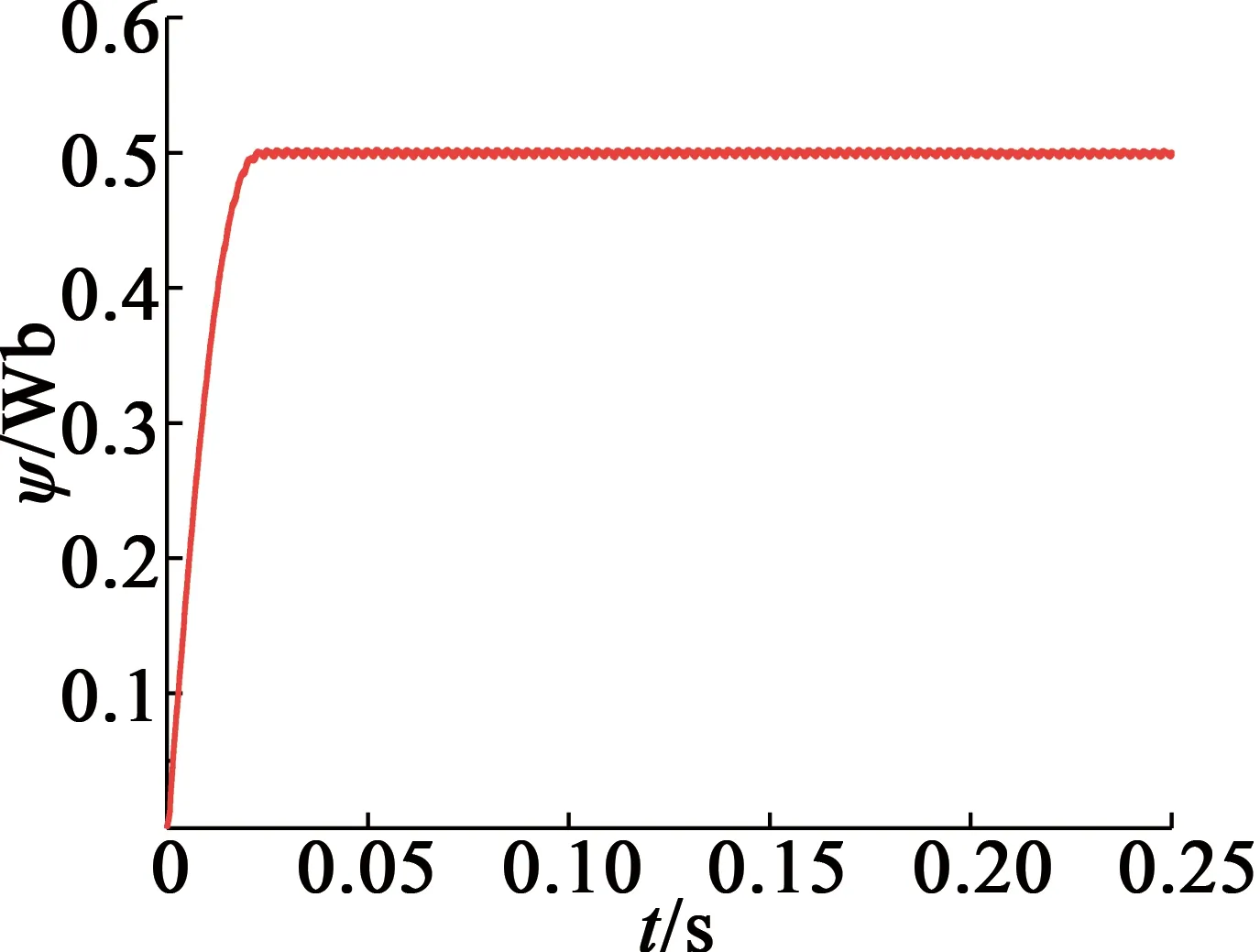
图8 基于新型趋近律的超扭曲滑模的PMSM-DTC系统磁链响应图
电机转速设定为1 000 r/min,在t=0时负载转矩为0.5 N·m,t=0.2 s时其阶跃为5 N·m,2种方法的转矩响应波形对比如图9所示。传统PMSM-DTC系统转矩稳定时间为0.06 s,而改进后系统转矩稳定时间为0.02 s,响应时间减小了0.04 s。同时,改进后转矩脉动明显减小,系统的稳定性得到了显著的提高。

图9 系统转矩响应对比图
2种方法的转速响应波形对比如图10所示。传统PMSM-DTC系统转速稳定时间为0.10 s,而改进后系统转速稳定时间为0.04 s,响应时间减小了0.06 s,同时改进后的转速波动较小,能够快速达到稳定状态。以上分析说明了改进后的系统优于传统的PMSM-DTC系统。

图10 系统转速响应对比图
4 结 语
本文在PMSM-DTC基础上,采用超扭曲结构设计了磁链和转矩的滑模控制器,采用饱和函数sat(s)代替传统方法中的符号函数sgn(s),并且利用MATLAB/Simulink仿真工具进行仿真分析。仿真结果表明,改进后控制系统速度响应比传统PMSM-DTC系统速度响应在时间上减小了0.06 s,能在更短的时间内使速度趋于稳定。同时对转矩的突变有较好的鲁棒性,转矩脉动更小,系统的稳定性优于传统的PMSM-DTC系统。
猜你喜欢
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20