变步长扰动观察法在光伏发电MPPT中的应用
2018-10-20 02:42何智成
新型工业化 2018年8期
何智成
(广州市电力工程设计院有限公司,广东 广州 510220)
0 引言
光伏发电是可再生能源发电的重要组成部分,具有无污染、无噪音和资源丰富等优点,其开发利用既有良好的社会价值和环境价值,又能带来明显的经济效益。为了尽可能提高光电转换效率,控制光伏阵列工作在最大功率输出点,需要对其进行有效的最大功率点跟踪(maximum power point tracking—MPPT)控制[1-6]。
本文提出一种变步长的扰动观察法,根据光伏电池当前工作点在P-U输出特性曲线相应位置的斜率的绝对值大小,选择不同的步长。仿真结果表明:本文所提方法具有更高的控制精度和更快的响应速度,能够减缓最大功率点附近功率振荡现象。
1 光伏阵列的数学模型
光伏阵列通常由许多光伏电池串并联组成,光伏电池的等效电路如图1所示,其中Rsh和Rs为光伏电池的并联等效电阻和串联等效电阻。考虑太阳辐射和温度变化的光伏阵列数学模型可简化表示为[7-10]:

其中:

上述公式中:Rref为参考光照强度,Tref为参考环境温度,R为实际光照强度,TT为实际环境温度;Ioc和Voc分别为参考条件下短路电流和开路电压;RS为光伏阵列的串联电阻(单位为Ω);为光照参照强度条件下电流变化的温度系数(单位为A/℃);为参考条件下电压变化的温度系数(单位为V/℃)。
其中C1、C2和TT可表示为:
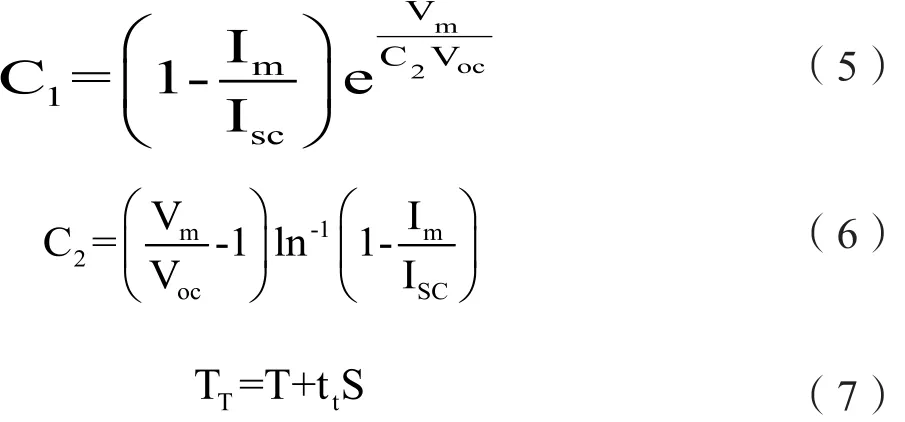
上述式中:Im为最大功率点的对应电流;Vm为最大功率点对应的电压;tt为光伏阵列的温度系数(单位为℃·m2/W);S为光照强度(单位为W/m2);T为环境温度(单位为℃)。

图1 光伏电池的等效电路Fig.1 Equivalent circuit of PV cell
其中ILG为光伏电池的光生电流,Id为二极管电流,Rs和Rsh分别为光伏电池的串联等效电阻和并联等效电阻。
光伏阵列在不同环境下的输出特性曲线如图2所示。通过图2可知,光伏阵列的输出具有明显的非线性特性,且在当前环境条件下仅有一个工作点的输出功率为最大值。因此,需要实时调整光伏电池的工作状态,使其工作在最大功率点附近。
在光伏电池和负载之间加入一个可以控制的DC/DC 变换器,通过改变DC/DC 变换器中开关管的占空比大小,可以等效改变外接负载电阻的阻值大小,达到了调整光伏电池输出参数的目的,从而跟踪光伏电池在当前环境条件的最大功率点,并且控制其在最大功率点处工作。
2 最大功率跟踪方法
目前,常用的MPPT方法有扰动观察法、电导增量法以及模糊控制法等。模糊规则需要以专家经验为基础建立,其正确与否直接影响到模糊控制法的控制效果,所以该控制方法存在一定局限性[11]。

图2 不同温度、光强下的光伏输出特性曲线Fig.2 PV output curves under different temperature and light intensity
电导增量法对硬件的响应速度和控制精度要求较高,扰动观察法具有控制简单、容易实现的优势[12-13]。
2.1 传统的扰动观察法
扰动观察法具体的工作过程如下:
① 当ΔU>0且Pm>Pm-1,下一个扰动的方向与当前扰动的方向相同;
② 当ΔU>0且Pm<Pm-1,下一个扰动的方向应与当前扰动的方向相反;
③ 当ΔU<0且Pm>Pm-1,下一个扰动的方向应与当前扰动的方向相同;
④ 当ΔU<0且Pm<Pm-1,下一个扰动的方向应与当前扰动的方向相反。
扰动观察法的控制流程如图4所示。通过反复外加扰动控制,光伏电池的实际工作点会逐渐逼近最大功率点,但是在当前工作点接近最大功率点时,会出现振荡现象,存在一定的功率损失[14]。
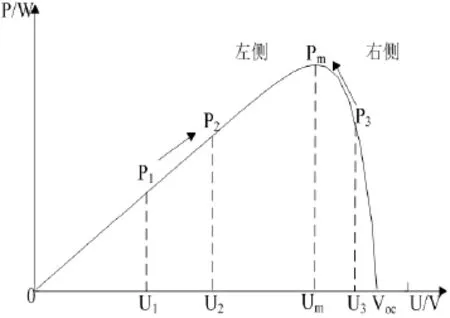
图3 扰动观察法控制原理图Fig.3 Control schematic diagram of perturbation and observation
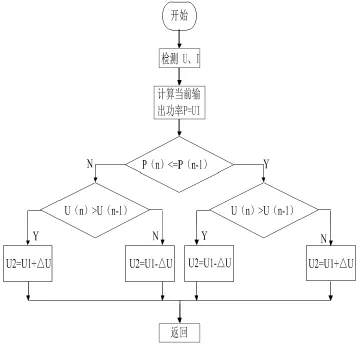
图4 扰动观察法控制流程图Fig.4 Control flow chart of perturbation and observation
2.2 变步长扰动观察法
传统扰动观察法的扰动步长的值在整个控制过程是恒定不变的,大步长虽然可提高系统的跟踪速度,但是当工作点接近最大功率点时,输出会出现较为明显的振荡。为了克服扰动观察法存在的缺点,对其进行改良和优化,提出一种变步长扰动观察法。
通过观察光伏电池P-U输出特性曲线可知,以曲线最大功率点的纵坐标为轴,最大功率点左右两侧的输出曲线存在非对称关系[15]。在输出电压从0增大到Umpp的过程中,位于P-U输出特性曲线最大功率点左侧且远离最大功率点的曲线斜率变化较少;位于最大功率点左侧,而且相对靠近最大功率点的曲线的斜率快速减少。
根据这个特点,将工作点在最大功率点左侧P-U输出曲线斜率变化较少的平稳部分的扰动步长设置为Δd1,提高跟踪速度;将工作点在最大功率点左侧P-U输出曲线斜率变化较大的部分和最大功率点右侧的扰动步长设置为Δd2,提高控制精度。其中,Δd1>Δd2。变步长扰动观察法的控制示意图如图5所示。

图5 变步长扰动观察法示意图Fig.5 Observation method of variable step length disturbance
变步长扰动观察法的控制过程如下:
假设是第n个采样点的输入变量为P(n)和U(n),则第n个采样点的ΔP(n)和ΔU(n)可由下式求得:

根据第n个工作点ΔP(n)和ΔU(n)点的关系,可确定第n个工作点的位置。当前工作点的位置与输出电压以及功率之间的关系式[9]:

工作点在最大功率点左侧。

工作点在最大功率点处。

工作点在最大功率点右侧。
根据上述关系式判断当前工作点的位置,从而据此选择扰动的方向和步长的大小。变步长扰动观察法的控制流程如图6所示。当工作点在最大功率点左侧,若ΔP>A,选择大步长Δd1;若ΔP<A,选择小步长Δd2。工作点在最大功率点右侧,选择小步长Δd2。
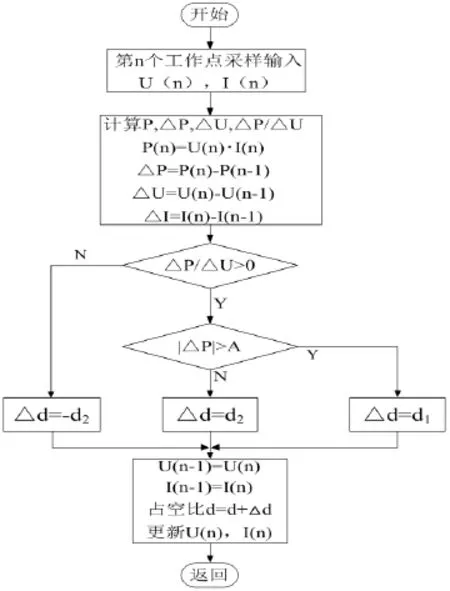
图6 变步长扰动观察法控制流程图Fig.6 Control flow chart with variable step size perturbation observation method
3 仿真与分析
通过MATLAB仿真软件搭建变步长扰动观察法的MPPT仿真模型,在环境因素迅速变化的条件下验证该方法跟踪最大功率点的可行性,其仿真模型如图7所示。
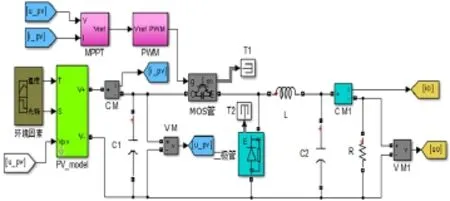
图7 变步长扰动观察法MPPT仿真模型图Fig.7 MPPT simulation model diagram of variable step size perturbation observation method
初始的环境温度为25 ℃,光强为1000 W/m2。在t=1 s时,环境温度变为20 ℃,光强变化至600 W/m2;在t=2 s时,环境温度变为25 ℃,光强变化至800 W/m2。两种扰动观察法的仿真结果如图8所示,其中图(a)为变步长扰动观察法的仿真波形图,图(b)为扰动观察法的仿真波形图。

图8 MPPT仿真结果图Fig.8 MPPT simulation result diagram
由图8可知,变步长扰动观察法可快速跟踪光伏电池在环境变化后的最大功率点,并且控制工作点稳定于最大功率点处,其动态性能优于传统的扰动观察法。
4 结论
本文针对光伏电池的运行特性,提出一种变步长扰动观察法。仿真结果表明本文所提控制方法具有更优越的跟踪速度和稳态精度,有效抑制最大功率点附近功率振荡的现象,所以更适合应用于光伏阵列的最大功率点跟踪控制。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
Bone Research(2021年2期)2021-09-11
河北理科教学研究(2020年2期)2020-09-11
作文成功之路·小学版(2020年1期)2020-03-03
数字技术与应用(2017年6期)2017-09-08
汽车维护与修理(2016年10期)2016-07-10
中学生数理化·高三版(2016年4期)2016-05-14
中国光学(2015年5期)2015-12-09
现代电子技术(2014年10期)2014-07-19
振动、测试与诊断(2014年4期)2014-03-01