
基于PSASP_UPI的光伏建模及混合步长仿真*
2018-10-16 01:37邱少引雷霞丁吉刘增庆李逐云余飞鸿
电测与仪表 2018年17期
邱少引,雷霞,丁吉,刘增庆,李逐云,余飞鸿
(西华大学 电气与电子信息学院,成都 610039)
0 引 言
随着人类对可再生能源的探索,光伏的并网容量不断增加。由于光伏发电具有间歇性和波动性、且没有旋转惯量,将影响电网的暂态稳定性[1-2]。因此,研究适合于光伏并网暂态分析仿真的方法,对于推动光伏的大规模应用进程具有重要意义。
目前,光伏的暂态仿真研究主要集中于光伏暂态模型研究和光伏并网影响研究[3]。光伏暂态模型研究侧重研究控制策略和光伏系统建模。文献[4]将一种混沌改进猫群算法运用于复杂情况下的光伏阵列全局最大功率点跟踪,提高了最大功率点跟踪效率。文献[5]提出了限制不对称电压暂降情况下光伏逆变器输出电流峰值的方法,改善了光伏逆变器的输出电流。文献[6]构建了可描述配电网综合负荷外特性的光伏系统等效模型,并验证了模型的有效性。以上文献为研究光伏暂态模型做出了贡献,但在仿真时对大电网进行等值简化,不能准确反应电网内部的暂态过程。并网影响研究侧重研究各种情况下光伏电站对电网暂态稳定性的影响。文献[7]利用电力系统暂态安全量化分析软件FASTES平台,构建大型光伏并网模型,定量分析了光伏电站与电网的交互影响。文献[8]利用PSCAD/EMTDC搭建了光伏并网模型,分析了光伏电站并网容量对电网暂态稳定性的影响。这类研究详细分析了各种情景下的电网暂态过程,但光伏电站建模相对简单,仿真不能反应光伏系统本身的暂态过程。
现有单一仿真软件无法在满足光伏建模精确性的同时保证电网规模。电力系统分析综合程(Power System Analysis Software Package,简称PSASP)的用户自定义接口(User Program Interface,简称UPI)可以将MATLAB/Simulink和PSASP有机结合,充分发挥两种软件各自在建模精确性和规模性上的优势。文献[9-10]基于PSASP_UPI建立了光伏并网仿真模型,分析了光伏电站与电网的交互影响,但是没有对仿真的步长进行控制,未实现真正意义上的混合仿真;文献[11-13]提出利用PSASP_UPI调用API函数的方法实现了混合步长仿真,但由于调用了API函数导致仿真效率不高、速度较慢。
基于以上分析,文章首先在Simulink中搭建了基于PQ控制的光伏并网模型,利用Simulink Code将模型编译成C代码,以函数的形式嵌入固定格式的用户自定义程序(User Program, 简称UP)中,然后在VC环境将UP编辑为每接收一个计算信号就利用计算初值单步计算一百次,完成计算后保存并返回计算结果,再利用VC将UP编译成可被PSASP调用的动态链接库,最后在PSASP中搭建CEPRI 36节点系统,通过光伏并网暂态稳定仿真验证了模型的有效性。
1 光伏暂态建模
文章首先在Simulink中搭建了含光伏电池、MPPT、低电压穿越保护以及基于PQ控制逆变器的三相光伏并网模型,如图1所示。
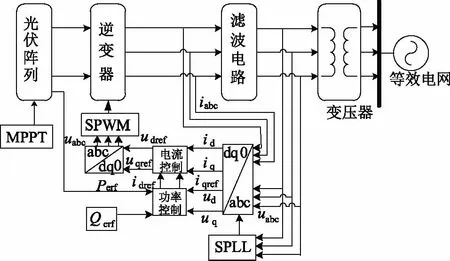
图1 三相光伏并网模型
电池模型采用的是通用型仿真模型,该模型可根据电池厂商提供的标准环境下的短路电流Isc、开路电压Uoc、最大功率电流Im和最大功率电压Um得到光伏电池的输出特性。最大功率点跟踪(Maximum Power Point Tracking,简称MPPT),采用的是扰动观察法(Perturbation and Observation,简称P & O),该方法通过不断地对光伏电池工作电压进行扰动实现对最大功率的跟踪。经过封装后,含MPPT的光伏阵列图2所示。图中,T为环境温度,S为光照强度,Ns为串联电池数,Np为并联电池数,Pout为光伏阵列实际输出功率。通过调节T和S可改变环境条件,调节Ns和Np以改变光伏阵列输出。
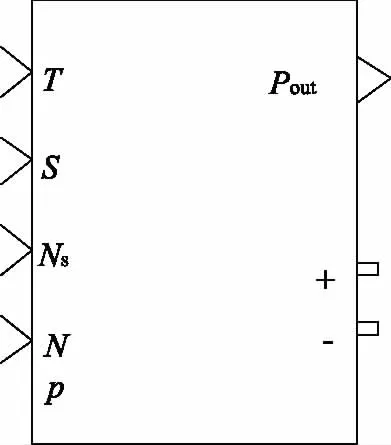
图2 封装光伏阵列
光伏发电系统的逆变器采用PQ控制策略,该方法通过控制逆变器的输出有功电流和无功电流使其跟踪参考电流来完成控制目标。对光伏阵列而言其输出功率在环境条件不变的情况下是一定的,所以文中PQ控制的参考功率Pref=Pout。此外,根据Q/GDW 617-2011《光伏电站接入电网技术规定》,利用Simulink逻辑电路搭建了低压光伏电站低电压穿越控制策略,如图3所示。当故障发生时并网点电压低于图示中的实线,则光伏电站脱网。
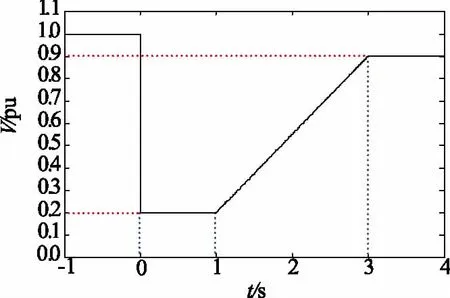
图3 光伏电站低电压穿越图
2 UPI光伏并网混合步长仿真实现
2.1 PSASP_UPI暂态稳定计算模型
暂态稳定计算的数学模型主要由三部分组成:
(1)电网数学模型,即网络方程:
X=F(X,Y)
(1)
式中F=(f1,f2,…,fn)T;X=(x1,x2,…,xn)T为网络方程的求解变量。
(2)发电机、负荷等一次、二次设备的数学模型,即微分方程:
Y=G(X,Y)
(2)
式中G=(g1,g2,…,gn)T;Y=(y1,y2,…,yn)T为微分方程的求解变量。
(3)网络操作方程,如故障产生、故障切除和负荷冲击等,会改变X、Y。
考虑用户程序后,PSASP暂态稳定计算的数学模型如下:
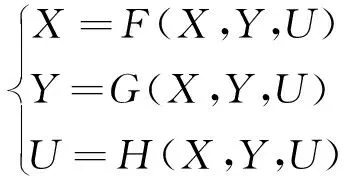
(3)
式中H=(h1,h2,…,hn)T;U=(u1,u2,…,un)T为用户程序的求解变量。
2.2 用户程序设计
PSASP在利用UPI进行暂态稳定计算时,调用的是由VC生成的动态链接库。在Simulink中搭建了基于PQ控制的三相光伏并网模型后,利用Simulink自带的Simulink Code可以将模型编译成C代码。Simulink Code在代码生成时仿真模式为Fixed-step方式(固定步长),解法器采用的ode 5解法器(四/五阶龙格-库塔法)。
PSASP的用户自定义程序有其固定的编写格式,Simulink Code生成的C代码只需以函数形式嵌入程序即可。光伏以电流源形式并网,所以生成函数的形参是并网点电压的幅值和相角,返回值为注入母线的电流实部和虚部。
2.3 混合步长的实现
PSASP_UPI可借助MATLAB/Simulink强大的建模功能建立更精确的模型,但是在仿真过程中PSASP不会控制UP的步长,最后UP输出结果和电网输出结果步长是一致的。这样就会导致对Simulink模型利用不充分,结果也不能准确反映光伏电站内部的暂态过程。文章通过对UP的改进,在PSASP计算1个步长时UP计算一百个步长,然后通过动态链接库将小步长仿真结果保存到文本文件中,实现混合步长仿真,其流程图如图4所示。
图4中,k为 PSASP暂态稳定计算的迭代次数;m为UP的迭代次数。UP的仿真步长为0.000 1,PSASP的仿真步长为0.01,是UP仿真步长的100倍。UP首先利用输入的t时刻的值作为初值进行步长为0.000 1的暂态稳定计算,得到Ut+0.01、Ut+0.02、…、Ut+1这100个计算结果,保存每个结果,并且将t+1时刻的结果输出,接着PSASP利用Ut+1进行电网的暂态稳定计算,最后将计算得到的Yt+1、Xt+1作为下一时刻的计算初值,如此反复实现混合步长仿真。
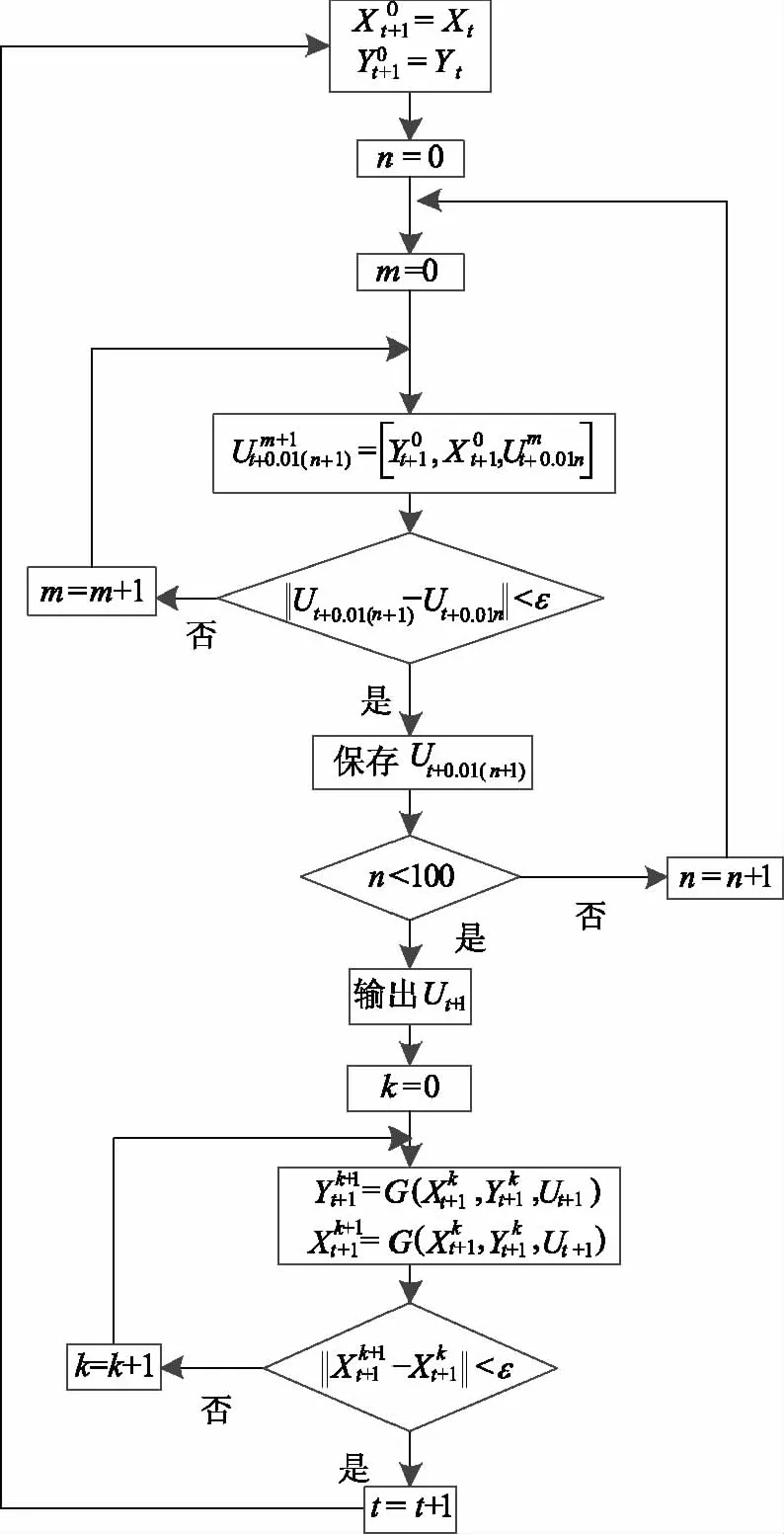
图4 混合步长仿真流程图
3 算例分析
3.1 仿真系统设置
文章采用CEPRI 36节点系统,该系统有36个节点、10台变压器、37条交流线,系统基准容量为100 MVA。如图5所示,光伏电站经升压后从20号母线接入电网。
光伏阵列的参数如表1所示,表中PM为单个电池最大输出功率,根据设置的光伏电池数量,光伏电站总的输出功率Pout为80 MW。
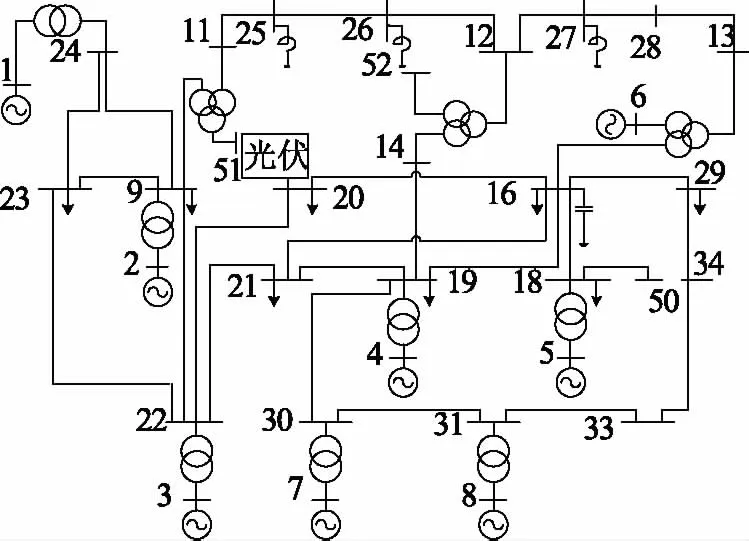
图5 CEPRI 36节点系统
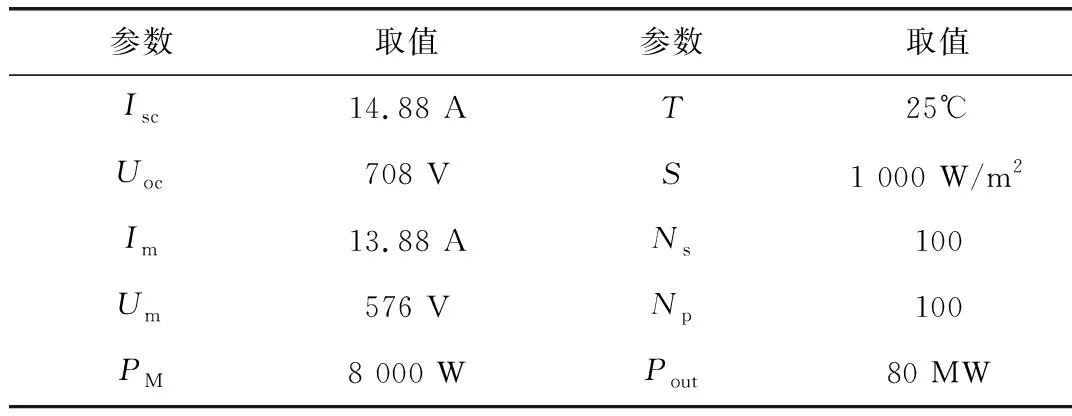
参数取值参数取值Isc14.88 AT25℃Uoc708 VS1 000 W/m2Im13.88 ANs100Um576 VNp100PM8 000 WPout80 MW
3.2 光伏电站对比分析
为验证所建UP模型的正确性,文章在20号母线分别接入PSASP光伏电站模型和UP光伏电站模型的情况下做了仿真对比。两次的仿真步长都为0.01 s。图6和图7为23号母线附近在1 s时发生三相短路故障, 0.12 s后切除故障的光伏电站出特性。
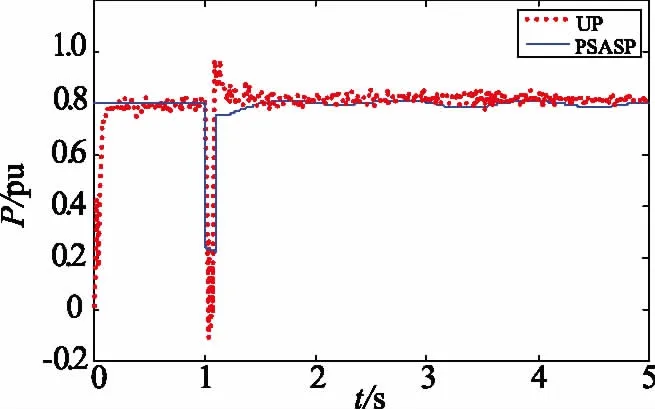
图6 PSASP光伏模型和UP光伏模型有功出力
从图6结果可以看出,UP光伏模型与PSASP光伏模型有功出力特性基本一致,说明了所建模型的正确性。但两者在动态特性上存在明显差异,UP模型的有功出力在开始仿真时是先上升正后平稳,这是由于UP模型中加入了MPPT的原因,而PSASP的光伏模型则没有MPPT,出力虽然平稳,但是不能体现光伏模型得动态特性。在故障期间,PSASP的光伏模型只能反映光伏出力的大致趋势,而UP模型能够更灵敏的反应故障期间的光伏出力特性。
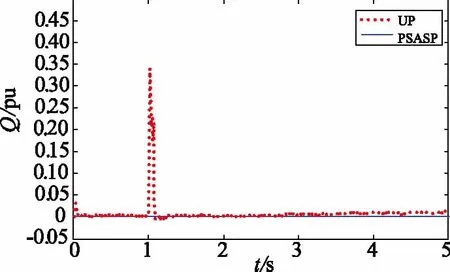
图7 PSASP光伏模型和UP光伏模型无功出力
在无功出力方面,PSASP的光伏模型在整个仿真过程中都没有变化,这不符合实际的光伏动态特性,也不利于光伏电站的并网运行。而基于PQ控制的UP模型的无功出力在故障期间出现了波动,且为输出无功。说明所建UP模型除了动态特性较好外,还能在电网故障时提供一定的无功支撑,更符合实际、更利于光伏电站的并网运行。
3.3 混合步长仿真
上述的UP模型虽然有较好的动态特性,但是它的输出步长依赖于PSASP。文章改进的UP模型可以摆脱PSASP对步长的限制,利用PSASP_UPI调用动态链接库将小步长的结果存到文本文件中,实现混合步长仿真,充分利用Simulink在建模上的优势。设PSASP的仿真步长为0.01 s,UP的仿真步长为0.000 1 s,为验证混合步长在仿真上的优势文章设定了两种场景。
(1)场景一:不影响光伏电站脱网
设21号母线附近在1 s时发生三相短路故障,0.12 s后切除故障。图8为光伏出力特性图,从故障前后的波形可以看出,UP输出和PSASP输出是一致的,并且UP以小步长的形式输出,实现了混合步长。从故障期间的波形可以看出UP输出和PSASP输出结果趋势基本一致,但是PSASP的输出结果出现了明显的失真,说明采用小步长的UP输出动态特性更好,能够跟精确的反应故障期间的光伏电站出力特性。仿真失真就可能导致光伏电站在穿越低电压是误动。为进一步测试混合步长仿真的优势,设计了场景二。
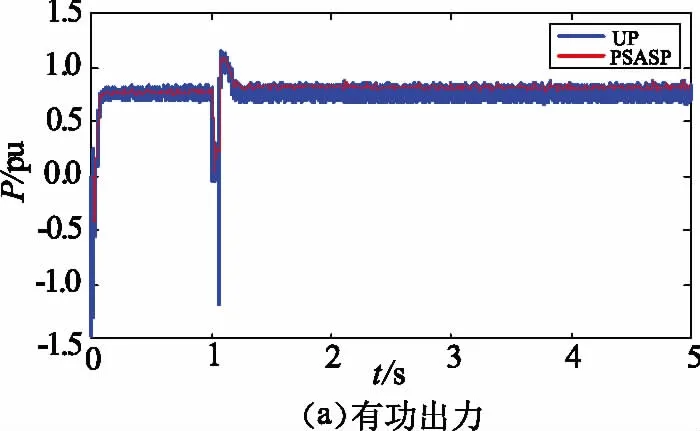
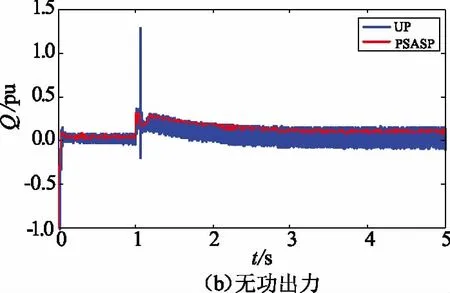
图8 混合步长仿真光伏电站出力特性
(2)场景二:影响到光伏电站脱网
设固定步长仿真的步长为0.01 s,混合步长仿真PSASP步长为0.01 s、UP步长为0.000 1 s。通过改变故障位置和故障的节点电阻,最终确定在1 s时16号母线发生三相短路接地故障,接地电阻为0.001 5 pu,在1.02 s时切除故障,此时采用混合步长的仿真光伏电站刚好不脱网(即故障期间并网母线最低电压接近于0.2 pu但是不低于0.2 pu)。图9(a)~图9(d)分别为并网点电压、系统频率、光伏有功出力和光伏无功出力情况。
从仿真结果可以看出在相同的故障条件下,采用混合步长的光伏没有脱网,系统稳定;而采用固定步长的仿真出现了光伏电站脱网的情况,导致有功缺额、频率下降、系统失稳。从图9(d)可以看到,由于固定步长仿真时大步长UP输出的失真,导致光伏电站在故障期间提供的无功支撑低于实际值,进而导致了图9(a)中光伏并网母线电压低于了0.2 pu,光伏电站无法穿越故障期间的低电压最终脱网。因此,采用混合步长的仿真能在极端故障下避免低压穿越控制的误动,更符合系统运行的特点,比固定步长仿真更具可行性。
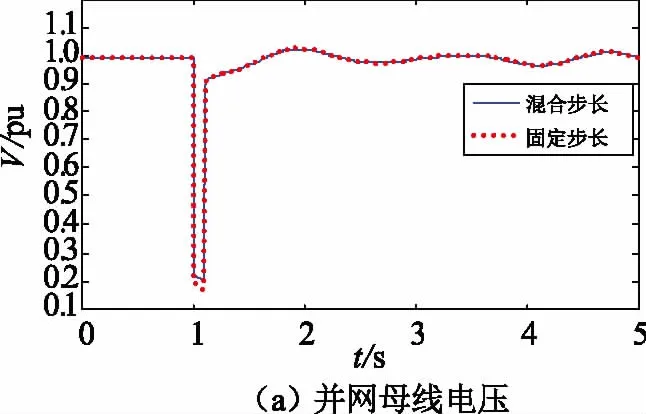
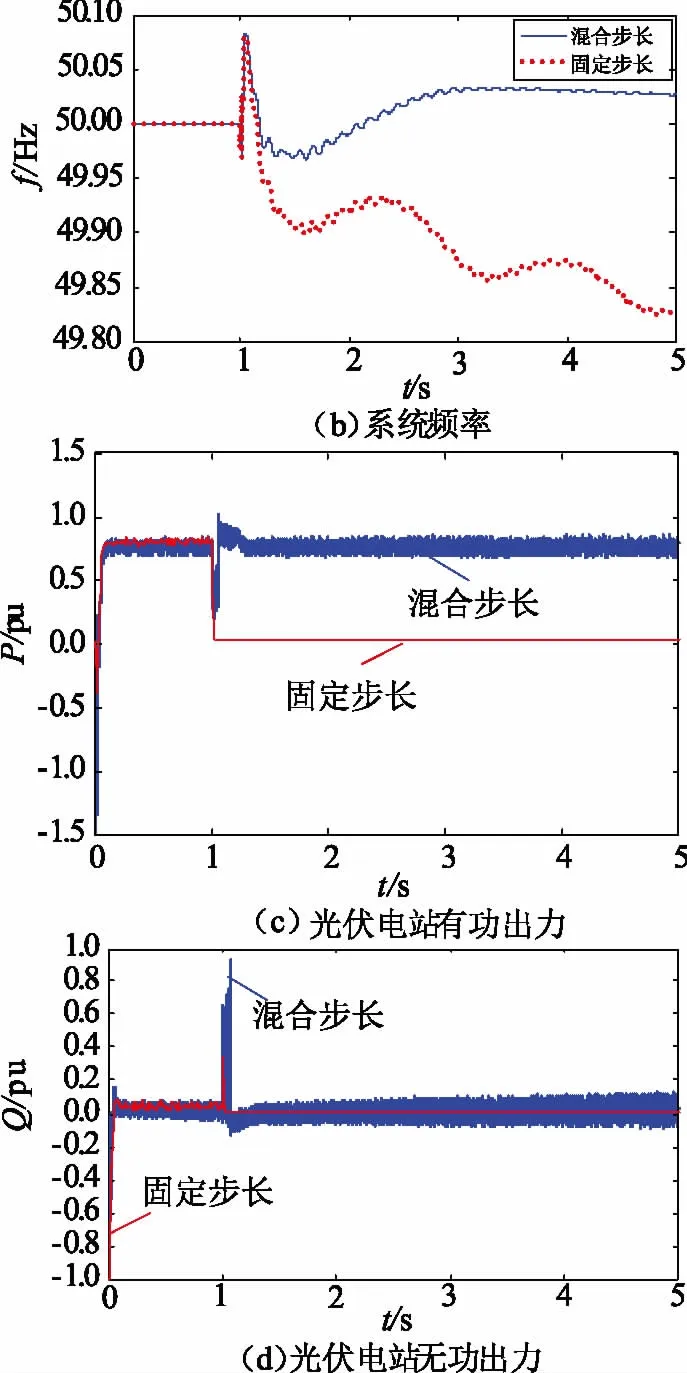
图9 极端情况暂态稳定分析
4 结束语
文章对UP进行改进,利用PSASP_UPI和Simulink Code搭建了光伏并网仿真模型,完成了与PSASP光伏电站的对比分析和混合步长仿真。仿真结果表明:
(1)所建UP模型与PSASP光伏模型特性一致,且具有更好的动态特性,验证了所建模型的正确性和灵敏性;
(2)相对固定步长而言,混合步长仿真的小步长结果更加精确,体现了模型的精确性;
(3)极端情况下混合仿真不会因失真导致光伏低压穿越控制的误动,表明所建模型更符合系统的运行状况,更具可行性。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
大电机技术(2021年5期)2021-11-04
电子制作(2018年14期)2018-08-21
电子测试(2017年23期)2017-04-04
电测与仪表(2016年23期)2016-04-12
河南电力(2016年5期)2016-02-06
电测与仪表(2015年5期)2015-04-09
河北科技大学学报(2015年5期)2015-03-11
电测与仪表(2014年2期)2014-04-04
电力工程技术(2014年5期)2014-03-20
